|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Функция отсчетов. Её свойства.
Ряд Котельникова имеет вид:
Полученное выражение представляет собой разложение в ряд непрерывной функции х(t). Величины (kΔt) представляют собой значения непрерывной функции в точках отсчета. Множитель вида является функцией времени и называется функцией отсчетов (рис.). Свойства функции отсчета: Функция отсчетов принимает максимальное значение, равное единице, в моменты времени t = kΔt и обращается в нуль в моменты времени t = (k ±m) Δt, где m = 1, 2, 3, .... Следует отметить, что функции отсчетов ортогональны на бесконечно большом интервале времени. Функция отсчетов представляет собой реакцию идеального фильтра нижних частот на единичную импульсную функцию.
В представлении непрерывного сообщения рядом Котельникова, используют фильтрующее свойство функции отсчетов, спектральная характеристика которой имеет вид: Функция отсчетов представляет собой реакцию идеального фильтра нижних частот на единичную импульсную функцию
Дельта-модуляция. Дельта-модуляцию можно рассматривать как частный вид КИМ, при которой используется одноразрядный двоичный код. При дельта-модуляции по каналу связи передается не сама функция сообщения, а лишь информация о знаке приращения канального сообщения. При этом в зависимости от знака приращения в канал поступают импульсы положительной или отрицательной полярности и постоянной амплитуды. Восстановление передаваемого сообщения производится путем суммирования (интегрирования) на приемном конце поступающих импульсов. Образование сигнала при дельта-модуляции можно рассмотреть с помощью рис. 111, а, б, где представлены структурная схема системы с дельта-модуляцией и временные диаграммы.
В зависимости от знака разности импульсы на выходе импульсного модулятора имеют положительную или отрицательную полярность. Импульсы положительной полярности увеличивают напряжение на выходе интегратора х'(t) на величину Образованный таким образом дельта-модулированный сигнал (рис. 111, е) с выхода импульсного модулятора подается в ЛС. На приемной стороне дельта-модулированный сигнал поступает на интегратор, аналогичный интегратору, установленному в передающем устройстве. Интегратор И2 формирует ступенчатый сигнал х'(t), аппроксимирующий передаваемое сообщение. Этот сигнал, проходя через фильтр нижних частот Ф, сглаживается, в результате чего образуется непрерывное сообщение, близкое к исходному. При дельта-модуляции наблюдаются искажения, обусловленные двумя причинами. Первой причиной искажений является шум квантования (рис. 111, б, участок b-с-d). Второй причиной являются перегрузки, возникающие в тех случаях, когда скорость изменения входного сообщения х(t) превышает среднюю скорость изменения следящего ступенчатого сигнала (рис. 111, б, участок а-b). Искажения, обусловленные квантованием сообщения, принципиально неустранимы. Их можно лишь уменьшить путем уменьшения величины шага квантования.
Поиск по сайту: |


 и совпадает с частотной характеристикой идеального ФНЧ с полосой пропускания Fв.
и совпадает с частотной характеристикой идеального ФНЧ с полосой пропускания Fв.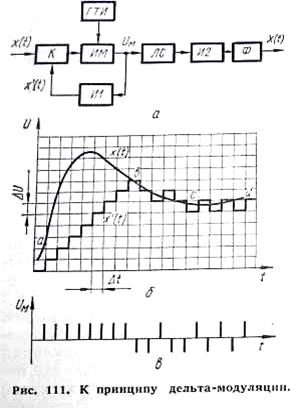 В рассматриваемой системе непрерывное сообщение х (t) аппроксимируется ступенчатой функцией х' (t), приближенно соответствующей передаваемому сообщению. Аппроксимирующий сигнал формируется интегратором ИM, связанным с выходом импульсного модулятора (ИМ). Компаратор (К) осуществляет сравнение аппроксимирующей функции х' (t) и передаваемого сообщения, вырабатывая в зависимое-, ти от знака разности х (t) — х'(t) сигнал положительной или отрицательной полярности. Сигнал сравнения подается на импульсный модулятор, на второй вход которого поступают импульсы ГТИ.
В рассматриваемой системе непрерывное сообщение х (t) аппроксимируется ступенчатой функцией х' (t), приближенно соответствующей передаваемому сообщению. Аппроксимирующий сигнал формируется интегратором ИM, связанным с выходом импульсного модулятора (ИМ). Компаратор (К) осуществляет сравнение аппроксимирующей функции х' (t) и передаваемого сообщения, вырабатывая в зависимое-, ти от знака разности х (t) — х'(t) сигнал положительной или отрицательной полярности. Сигнал сравнения подается на импульсный модулятор, на второй вход которого поступают импульсы ГТИ. , равную шагу квантования по уровню, при поступлении импульсов отрицательной полярности напряжение на выходе интегратора уменьшается также на величину
, равную шагу квантования по уровню, при поступлении импульсов отрицательной полярности напряжение на выходе интегратора уменьшается также на величину