|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Часть 5. ЭЛЕМЕНТЫ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ
Общая постановка задачи Определение 1. Линейное программирование — наука о методах исследования и отыскания экстремальных (наибольших и наименьших) значений линейной функции, на неизвестные которой наложены линейные ограничения. Эта линейная функция называется целевой, а ограничения, которые математически записываются в виде уравнений или неравенств, называются системой ограничений. Определение 2. Математическое выражение целевой функции и ее ограничений называется математической моделью экономической задачи. В общем виде математическая модель задачи линейного программирования (ЛП) записывается как
при ограничениях:
где xj — неизвестные; aij, bi, cj — заданные постоянные величины. Все или некоторые уравнения системы ограничений могут быть записаны в виде неравенств. Математическая модель в более краткой записи имеет вид
при ограничениях:
Определение 3. Допустимым решением (планом) задачи линейного программирования называется вектор = (x1, x2,..., xп), удовлетворяющий системе ограничений. Множество допустимых решений образует область допустимых решений (ОДР). Определение 4. Допустимое решение, при котором целевая функция достигает своего экстремального значения, называется оптимальным решением задачи линейного программирования и обозначается опт. Базисное допустимое решение (х1, х2,..., xr, 0, …, 0) является опорным решением, где r — ранг системы ограничений.
Виды математических моделей
Математическая модель задачи ЛП может быть канонической и неканонической. Определение 5. Если все ограничения системы заданы уравнениями и переменные xj неотрицательные, то такая модель задачи называется канонической. Если хотя бы одно ограничение является неравенством, то модель задачи ЛП является неканонической. Чтобы перейти от неканонической модели к канонической, необходимо в каждое неравенство ввести балансовую переменную xn+i. Если знак неравенства ≤, то балансовая переменная вводится со знаком плюс, если знак неравенства ≥, то — минус. В целевую функцию балансовые переменные не вводятся. Чтобы составить математическую модель задачи ЛП, необходимо: — ввести обозначения переменных; — исходя из цели экономических исследований, составить целевую функцию; — учитывая ограничения в использовании экономических показателей задачи и их количественные закономерности, записать систему ограничений. Для рассмотрения решения задач линейного программирования дадим некоторые понятия аналитической геометрии в n-мерном пространстве. Глава 19. ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ ГЕОМЕТРИИ В n-МЕРНОМ ПРОСТРАНСТВЕ Основные понятия и определения
Дано n-мерное пространство, точки которого имеют координаты (x1, x2, . . . ,xп). Определение 1. Множество точек n-мерного пространства, координаты которых удовлетворяют уравнению
где хотя бы одно из чисел а1, a2, ..., an отлично от нуля, называется гиперплоскостью п-мерного пространства. В векторной форме оно записывается следующим образом:
где = (a1, a2,..., an), = (x1, x2,..., xn). Даны две гиперплоскости
Определение 2. Множество точек n-мерного пространства, координаты которых одновременно удовлетворяют каждому уравнению системы, называется пересечением гиперплоскостей. Дано неравенство
Эта зависимость определяет полуплоскость двухмерного пространства, лежащую по одну сторону от прямой
которая называется граничной прямой. Определение 3. Множество точек n-мерного пространства, координаты которых удовлетворяют неравенству
называется полупространством n-мерного пространства, расположенным по одну сторону от гиперплоскости
Определение 4. Множество точек n-мерного пространства, содержащее вместе с любыми двумя точками A и В и все точки отрезка АВ, называется выпуклым телом (областью, фигурой). Примеры плоских выпуклых фигур приведены на рис. 19.1.
Примеры невыпуклых фигур приведены на рис. 19.2.
Дадим некоторые определения выпуклой области. Определение 5. Точка А называется внутренней точкой выпуклой области, если в сколь угодно малой окрестности этой точки содержатся только точки этой области. Определение 6. Точка В называется граничной точкой выпуклой области, если в сколь угодно малой окрестности этой точки содержатся как точки данной области, так и не принадлежащие ей (рис. 19.3). Определение 7. Точка С называется угловой точкой выпуклой области, если она является граничной и не лежит внутри отрезка, соединяющего две другие точки этой области (рис. 19.3).
Определение 8. Если область включает все свои граничные точки, то она называется замкнутой. Выпуклая область может быть ограниченной и неограниченной. Определение 9. Ограниченной называется область, если существует такое число М > 0, что радиус-вектор , соединяющий начало координат с любой точкой области, по абсолютной величине меньше М, т.е. || ≤ М. Для этой области все ее точки находятся на конечном расстоянии от начала координат. Определение 10. Если найдутся точки области, сколь угодно удаленные от начала координат, то область называется неограниченной. Определение 11. Выпуклая замкнутая ограниченная область, имеющая конечное число угловых точек, называется выпуклым п-мерным многогранником. Определение 12. Выпуклая замкнутая неограниченная область, имеющая конечное число угловых точек, называется выпуклой п-мерной многогранной областью. Определение 13. Линейная комбинация S векторов
в которой коэффициенты ti удовлетворяют условиям
называется выпуклой линейной комбинацией. Определение 14. Пересечением выпуклых областей называется множество точек, являющееся общей частью этих областей. ТЕОРЕМА 1. Пересечение выпуклых областей есть выпуклая область. ТЕОРЕМА 2. Множество точек выпуклого п-мерного многогранника совпадает с множеством любых выпуклых линейных комбинаций его угловых точек. 19.2. Решение систем m линейных неравенств с двумя переменными
Дана система т линейных неравенств с двумя переменными
Знаки некоторых или всех неравенств могут быть ≥. Рассмотрим первое неравенство в системе координат Х1ОХ2. Построим прямую
которая является граничной прямой. Эта прямая делит плоскость на две полуплоскости 1 и 2 (рис. 19.4).
Полуплоскость 1 содержит начало координат, полуплоскость 2 не содержит начала координат. Для определения, по какую сторону от граничной прямой расположена заданная полуплоскость, надо взять произвольную точку на плоскости (лучше начало координат) и подставить координаты этой точки в неравенство. Если неравенство справедливо, то полуплоскость обращена в сторону этой точки, если не справедливо, то в противоположную от точки сторону. Направление полуплоскости на рисунках показываем стрелкой. Определение 15. Решением каждого неравенства системы является полуплоскость, содержащая граничную прямую и расположенная по одну сторону от нее. Определение 16. Пересечение полуплоскостей, каждая из которых определяется соответствующим неравенством системы, называется областью решения системы (ОР). Определение 17. Область решения системы, удовлетворяющая условиям неотрицательности (xj ≥ 0, j = ), называется областью неотрицательных, или допустимых, решений (ОДР). Если система неравенств совместна, то ОР и ОДР могут быть многогранником, неограниченной многогранной областью или одной точкой. Если система неравенств несовместна, то ОР и ОДР — пустое множество. Пример 1. Найти ОР и ОДР системы неравенств и определить координаты угловых точек ОДР
Решение. Найдем ОР первого неравенства: х1 + 3x2 ≥ 3. Построим граничную прямую х1 +3x2 – 3 = 0 (рис. 19.5). Подставим координаты точки (0,0) в неравенство: 1∙0 + 3∙0 > 3; так как координаты точки (0,0) не удовлетворяют ему, то решением неравенства (19.1) является полуплоскость, не содержащая точку (0,0). Аналогично найдем решения остальных неравенств системы. Получим, что ОР и ОДР системы неравенств является выпуклый многогранник ABCD.
Найдем угловые точки многогранника. Точку А определим как точку пересечения прямых
Решая систему, получим А(3/7, 6/7). Точку В найдем как точку пересечения прямых
Из системы получим B(5/3, 10/3). Аналогично найдем координаты точек С и D: С(11/4; 9/14), D(3/10; 21/10). Пример 2. Найти ОР и ОДР системы неравенств
Решение. Построим прямые и определим решения неравенств (19.5)-(19.7). ОР и ОДР являются неограниченные многогранные области ACFM и ABDEKM соответственно (рис. 19.6). Пример 3. Найти ОР и ОДР системы неравенств
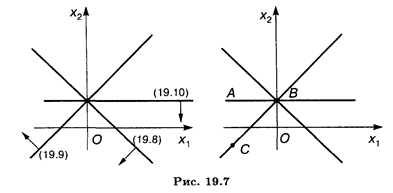
Решение. Найдем решения неравенств (19.8)-(19.10) (рис. 19.7). ОР представляет неограниченную многогранную область ABC; ОДР — точка В.
Пример 4. Найти OP и ОДР системы неравенств
Решение. Построив прямые, найдем решения неравенств системы. ОР и ОДР несовместны (рис. 19.8). УПРАЖНЕНИЯ
Найти ОР и ОДР систем неравенств
Поиск по сайту: |