|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Кінематичний синтез кулачкових механізмів⇐ ПредыдущаяСтр 15 из 15
Розглянемо найпростішу задачу побудови профілю кулачка, який на практиці реалізує необхідний закон руху веденої ланки. Цей закон вибирається довільно, але з таким розрахунком, щоб при заданій схемі механізму виконувалися певні технологічні і експлуатаційні вимоги. Для кулачкового механізму двигуна внутрішнього згоряння такими вимогами є: 1) забезпечення підйому і посадки клапана (штовхача) на сідло; 2) утримання його в дальньому положенні при найбільш відкритому отворі для впуску в циліндр робочого тіла і випуску відпрацьованих газів; 3) забезпечення плавного і по можливості безударного руху клапана, так як лише при цій умові спрацювання елементів кінематичних пар буде найменшим. Від вибраного закону руху штовхача залежать не тільки його кінематичні характеристики, що впливають на робочий процес машини, але й величина тієї роботи, яка необхідна для надання ланкам кінетичної енергії, а також величина напружень в ланках і жорсткість пружини, що замикає вищу кінематичну пару.
1) відкривання клапана для впуску робочого тіла, чому відповідає поворот кулачка на кут 2) перебування клапана в нерухомого стані і найбільш віддаленому від центра 3) опускання клапана з верхнього положення в нижнє, при цьому вістря рухається по дузі 4) Назва вказаних вище кутів повороту кулачка пов’язана з характером руху штовхача за час одного циклу: Позначивши час повороту кулачка для кожної фази буквою
Час одного циклу виражається за формулою
Робочий профіль
При таких позначеннях робочий кут повороту кулачка дорівнює Зауважимо, що при Вибравши ту чи іншу схему кулачкового механізму і закони руху штовхача та кулачка, які повинні відповідати операціям, що виконує механізм в складі машини, можна приступати до побудови профілю кулачка. Задача кінематичного синтезу механізму обернена до задачі кінематичного аналізу. Тому зручно використати відомий метод обернення руху. Нехай необхідно побудувати профіль кулачка центрального кулачкового механізму з роликовим штовхачем, який здійснює поступальний рух. При цьому повинні бути задані фазові кути повороту кулачка Через довільно вибрану точку
Рис. 6.69. Діаграма руху штовхача
Фазові кути повороту кулачка
 і одержуємо в перетині з колом радіусом і одержуємо в перетині з колом радіусом  точки 0', 1', 2',..., 13'. Тепер необхідно на відрізках прямих, обмежених побудованими колами, відкласти відповідні ординати діаграми: наприклад, від точки 1' в напрямку точки 1 відкладемо відрізок 1'В , який дорівнює ординаті 11' діаграми, від точки 2' – відрізок 2'В і т.д. точки 0', 1', 2',..., 13'. Тепер необхідно на відрізках прямих, обмежених побудованими колами, відкласти відповідні ординати діаграми: наприклад, від точки 1' в напрямку точки 1 відкладемо відрізок 1'В , який дорівнює ординаті 11' діаграми, від точки 2' – відрізок 2'В і т.д.
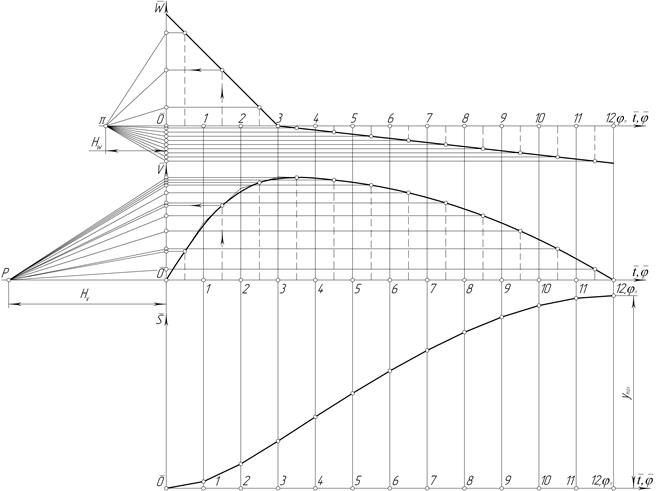
Побудовані точки Ділянки 6' - 7' і 13' - 0' обмежені дугами кіл радіусів Дійсний, або практичний, профіль одержимо як обвідну лінію для всіх положень кіл ролика, проведених з центрів В інженерній практиці для забезпечення безударної роботи кулачкового механізму задається не закон руху штовхача, а закон зміни його прискорення на ділянках підйому і опускання. Прискорення задається таким чином, щоб при набіганні веденої ланки на робочий профіль кулачка або при її збіганні сили інерції змінювалися плавно чи скачкоподібно. В таких випадках будуть відсутні жорсткі удари. Кінематичні діаграми В якості прикладу розглянемо задачу побудови профілю кулачка для центрального кулачкового механізму з роликом (рис. 6.70) для якого задано геометричні параметри Розв’язок задачі здійснюється у такій послідовності:
Рис. 6.70. Побудова профілю кулачка
1. Вибирається система координат якісної діаграми прискорення 2. Відрізок осі абсцис довжиною 3. Методом графічного інтегрування, який обернений до методу графічного диференціювання, будується діаграма лінійної швидкості штовхача Через точки діаграми Під діаграмою прискорення будується нова система відліку для діаграми швидкості Застосовуючи до діаграми 4. Визначається масштаб геометричних і фізичних величин на осях абсцис: градусний масштаб кута
масштаб часу
де 5. Масштаби кінематичних характеристик руху штовхача на осях ординат визначаються за формулами: масштаб переміщення
де масштаб швидкості
масштаб прискорення
Результати графічного розв’язку задачі ілюструються на рис. 6.70. Побудова кінематичних діаграм руху штовхача на ділянці опускання здійснюється так само, як і на ділянці підйому. Якщо діаграма відома На рис. 6.71 наведено графічну побудову профілю кулачка для центрального механізму з роликом.
Рис. 6.70. Графічне інтегрування діагрми прискорення
Рис. 6.71. Центральний кулачковий механізм з роликом
Поиск по сайту: |
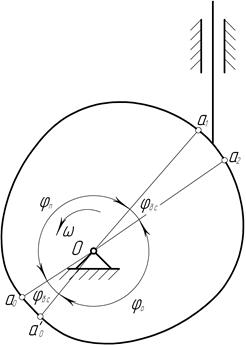 Для випадку впускного клапана поршневого двигуна внутрішнього згоряння за час одного оберту кулачка відзначаються такі фази (рис. 6.68):
Для випадку впускного клапана поршневого двигуна внутрішнього згоряння за час одного оберту кулачка відзначаються такі фази (рис. 6.68): і ковзання вістря штовхача по дузі кола
і ковзання вістря штовхача по дузі кола  ;
; , що спирається на
, що спирається на  ;
; , а кулачок повертається на кут
, а кулачок повертається на кут  ;
; поворот кулачка на кут
поворот кулачка на кут  і ковзання вістря штовхача по дузі кола
і ковзання вістря штовхача по дузі кола  , коли штовхач зупинився і перебуває в найнижчому положенні аж до співпадання вістря
, коли штовхач зупинився і перебуває в найнижчому положенні аж до співпадання вістря  з точкою
з точкою  профілю кулачка, після чого всі чотири фази повторюються у вказаному порядку.
профілю кулачка, після чого всі чотири фази повторюються у вказаному порядку. з відповідним індексом, кути повороту можна виразити через кутову швидкість
з відповідним індексом, кути повороту можна виразити через кутову швидкість  кулачка:
кулачка: .
. .
. кулачка перебуває під вістрям штовхача протягом часу
кулачка перебуває під вістрям штовхача протягом часу  , який називається робочим часом
, який називається робочим часом .
. і визначається із співвідношення
і визначається із співвідношення  .
. кулачковий механізм буде двофазним і штовхач буде здійснювати неперервний поступальний рух.
кулачковий механізм буде двофазним і штовхач буде здійснювати неперервний поступальний рух. , максимальний хід
, максимальний хід  штовхача, радіус основної шайби кулачка
штовхача, радіус основної шайби кулачка  і радіус ролика
і радіус ролика  . Кулачок обертається з кутовою швидкістю
. Кулачок обертається з кутовою швидкістю  . Закон руху штовхача задається діаграмою
. Закон руху штовхача задається діаграмою  (рис. 6.69).
(рис. 6.69). . Так як штовхач містить ролик, то спочатку будуємо теоретичний профіль, для чого проводимо два концентричні кола: одне радіусом основної (теоретичної) шайби
. Так як штовхач містить ролик, то спочатку будуємо теоретичний профіль, для чого проводимо два концентричні кола: одне радіусом основної (теоретичної) шайби  , а інше максимальним радіусом кривої теоретичного профілю
, а інше максимальним радіусом кривої теоретичного профілю  . Як правило радіус ролика вибирається з умови
. Як правило радіус ролика вибирається з умови  .
.
 відкладаються в напрямку, протилежному напрямку обертання кулачка. Після цього дуги фазові кути
відкладаються в напрямку, протилежному напрямку обертання кулачка. Після цього дуги фазові кути  ділимо на стільки рівних частин, скільки їх міститься на відповідних ділянках діаграми
ділимо на стільки рівних частин, скільки їх міститься на відповідних ділянках діаграми  .
. з’єднуємо плавною лінією, яка визначає теоретичний профіль кулачка.
з’єднуємо плавною лінією, яка визначає теоретичний профіль кулачка. і
і  зв’язані між собою диференціальними залежностями
зв’язані між собою диференціальними залежностями  , фазові кути
, фазові кути  і закон зміни прискорення штовхача, який відповідає фазовому куту підйому.
і закон зміни прискорення штовхача, який відповідає фазовому куту підйому.
 . На горизонтальній осі абсцис відкладається кут повороту
. На горизонтальній осі абсцис відкладається кут повороту  або час
або час  , який відповідає цьому куту. На вертикальній осі відкладається лінійне прискорення штовхача
, який відповідає цьому куту. На вертикальній осі відкладається лінійне прискорення штовхача  . Будується якісна діаграма
. Будується якісна діаграма  .
. , який відповідає куту
, який відповідає куту  ділимо на
ділимо на  рівних частин. Число
рівних частин. Число  . Для цього зліва від початку системи відліку діаграми прискорення вибираємо полюс
. Для цього зліва від початку системи відліку діаграми прискорення вибираємо полюс  на відстані
на відстані  (мм). Для зручності подальших геометричних побудов приймаємо полюсну відстань кратною кроку кута підйому
(мм). Для зручності подальших геометричних побудов приймаємо полюсну відстань кратною кроку кута підйому  .
. , які відповідають серединам кутових кроків проводимо горизонтальні прямі і знаходимо точки їх перетину з віссю ординат. Ці точки з’єднуємо з полюсом
, які відповідають серединам кутових кроків проводимо горизонтальні прямі і знаходимо точки їх перетину з віссю ординат. Ці точки з’єднуємо з полюсом  . При цьму вимоги до полюсної відстані
. При цьму вимоги до полюсної відстані  між початком відліку і полюсом
між початком відліку і полюсом 
 ;
; ,
, – частота обертання кулачка.
– частота обертання кулачка. ,
, – максимальна ордината діаграми
– максимальна ордината діаграми  ;
; .
.