Якщо тверде тіло здійснює рух відносно рухомої системи відліку, а ця система здійснює одночасно переносний по відношенню до нерухомої системи відліку, то результуючий (абсолютний) рух тіла називається складним.
Мета цього підрозділу – встановлення миттєвого розподілу швидкостей точок твердого тіла, який відповідає результуючому складному руху при різних часткових допущеннях про характер відносного і переносного рухів твердого тіла в заданий момент часу.
5.2.1. Додавання двох поступальних рухів. Розглянемо тверде тіло, яке перебуває одночасно в двох незалежних поступальних рухах з характеристиками ( ) та ( ). Кожна точка твердого тіла здійснює складний рух, тому на підставі теорем про додавання швидкостей і прискорень при складному русі (п. 5.1) маємо, що
; .
Оскільки ці співвідношення справедливі для всіх точок тіла, тому результуючий його рух буде поступальний.
Отже, при додаванні двох поступальних рухів твердого тіла з швидкостями результуючий рух буде поступальним з швидкістю . Цей рух можна визначити рухом однієї точки тіла.
5.2.2. Додавання обертальних рухів навколо двох осей, що перетинаються. Нехай тверде тіло здійснює два незалежні обертальні рухи з кутовими швидкостями відносно нерухомих осей і , які перетинаються в точці (рис. 5.4).
Рис. 5.4. Додавання двох обертальний рухів навколо осей, що перетинаються
Так як точка належить одночасно осям і , то її швидкість в будь-який момент часу дорівнює нулю. Розглянемо точку , яка визначає кінець вектора , побудованого за правилом паралелограма. За теоремою про додавання
швидкостей при складному русі її швидкість дорівнює
.
Вектори та колінеарні , тому . Це означає , що в заданий момент часу точка нерухома. Нерухомою в цей момент часу буде вісь , яка визначається точками . Отже, результуючим миттєвим рухом буде обертання навколо осі з деякою кутовою швидкістю .
Розглянемо довільну точку тіла. Визначимо її абсолютну швидкість в результуючому русі
.
З цієї рівності визначаємо
(5.7)
.
Таким чином, при додаванні обертальних рухів навколо осей, що перетинаються в точці , результуючим рухом тіла буде миттєвий обертальний рух навколо осі , яка проходить через точку , причому кутова швидкість цього руху дорівнює геометричній сумі кутових швидкостей складових рухів.
Миттєва вісь обертання визначається точкою і вектором . З плином часу вісь змінює своє положення, описуючи конічну поверхню з вершиною в точці .
Одержані в даному пункті результати можуть бути використані при кінематичному аналізі зубчастих передач і механізмів з конічними зубчастими колесами.
5.2.3. Додавання двох обертальних рухів відносно паралельних осей. Розглянемо випадок коли тверде тіло здійснює два незалежні миттєві обертальні рухи з кутовими швидкостями навколо нерухомих паралельних осей відповідно.
Результуючим рухом буде плоскопаралельний рух тіла, бо швидкості точок, розміщених на прямій, яка паралельна миттєвим осям обертання, будуть однакові. Тому достатньо розглянути миттєвий розподіл швидкостей в довільному перерізі тіла площиною , перпендикулярною до осей обертання.
Обертання напрямлені в один бік. Припустимо, що кутові швидкості мають однакові напрямки. Позначимо через точки перетину фігури з осями обертання (рис. 5.5).
Рис. 5.5. Додавання двох однонапрямлених обертальних рухів навколо паралельних осей
(5.8)
Визначимо абсолютні швидкості точок :
; .
Напрямки цих швидкостей зображені на рис. 5.5. Для визначення МЦШ плоскої фігури сполучаємо кінцеві точки векторів та . В перетині з відрізком одержимо точку , через яку проходить миттєва вісь обертання.
(5.9)
За теоремою Ейлера можна записати
; .
де – кутова швидкість миттєвого обертального руху навколо осі . Для її визначення запишемо співвідношення, які одержуються з (5.8) та (5.9):
; .
На підставі цих співвідношень знаходимо
(5.10)
; .
Отже, якщо тіло здійснює два незалежні напрямлені в один бік обертальні рухи навколо паралельних осей, то його результуючий рух буде миттєвим обертальним навколо миттєвої осі, яка паралельна даним. Кутова швидкість результуючого руху і положення точки , яка визначає миттєву вісь обертання, знаходяться із співвідношень (5.10).
З плином часу миттєва вісь обертання буде змінювати своє положення, описуючи циліндричну поверхню.
Обертання напрямлені в протилежні боки. Нехай кутові швидкості мають протилежні напрямки і припустимо, що . Зобразимо як і в попередньому випадку, переріз тіла (рис. 5.6).
Швидкості точок визначаємо з тих же міркувань, що і в попередній задачі
; .
Побудову МЦШ (точка ) показано на рис. 5.6. Тоді миттєва вісь обертання проходить через точку , причому
,
Рис. 5.6. Додавання двох різнонапрямлених обертальних рухів навколо паралельних осей
або за властивістю пропорції
.
Підставляючи в ці рівності значення знаходимо остаточно
(5.11)
; .
В розглядуваному випадку результуючим рухом є миттєвий обертальний рух навколо осі , яка проходить через точку . Кутова швидкість цього руху і положення миттєвої осі обертання визначається із співвідношень (5.11). Одержані арезультати показують, що вектори кутових швидкостей при обертанні навколо паралельних осей додаються так само як і вектори паралельних сил.
Пара обертань. Розглянемо випадок . Така сукупність обертальних рухів називається парою обертань. На підставі формул (5.11) маємо
; .
Це означає, що миттєвий центр швидкостей (точка ) віднесена в нескінченність, а всі точки тіла в даний момент мають однакові швидкості. Таким чином, результуючим рухом буде поступальний (або миттєвий поступальний) з швидкістю , величина якої дорівнює , напрямленої перпендикулярно до площини векторів . Напрямок вектора визначається за правилом гвинта.
Таким чином пара обертань еквівалентна поступальному (або миттєвому поступальному ) руху з швидкістю , яка дорівнює моменту пари кутових швидкостей цих обертань.
5.2.4. Додавання обертального і поступального рухів. Розглянемо складний рух твердого тіла, складовими якого є поступальний та обертальний навколо нерухомої осі. Відносним рухом будемо вважати обертання навколо нерухомої осі з кутовою швидкістю , а переносним – поступальний рух із швидкістю .
В залежності від кута між векторами та можливі декілька випадків.
1. Швидкість поступального руху перпендикулярна до осі обертання ( ). На підставі теореми Ейлера (п. 4.2) такий рух є плоскопаралельним, а отже миттєвим обертальним навколо осі, яка паралельна і проходить через МЦШ.
Для побудови цієї осі вектор замінимо парою кутових швидкостей таких, що а (рис. 5.7). При цьому відстань визначаємо із рівності , звідки
.
Вектори при додаванні дають нульовий вектор і ми одержуємо, що рух тіла можна розглядати як миттєве обертання навколо осі з кутовою швидкістю .
2. Гвинтовий рух. Якщо складний рух тіла складається з обертального руху навколо нерухомої осі з кутовою швидкістю і поступального руху з швидкістю , яка напрямлена вздовж осі ( ), то такий рух тіла називається гвинтовим. Вісь називається віссю гвинта. Якщо , то гвинт називається правим, при – лівим. Кожна точка при гвинтовому русі описує гвинтову лінію. Швидкість довільної точки , яка розміщена на відстані від осі гвинта обчислюється за формулою
.
Напрямлена швидкість по дотичній до гвинтової лінії (рис. 5.8).
3. Швидкість поступального руху утворює довільний кут з віссю обертання (рис. 5.9 а). Розкладемо вектор на складові так, що , а . Замінивши швидкість парою кутових швидкостей та , одержимо після відкидання , що тіло здійснює обертальний рух навколо осі і поступальний рух з швидкістю , тобто гвинтовий рух навколо осі з кутовою швидкістю і поступальною швидкістю (рис. 5.9 б). Відстань при цьому визначається за формулою (5.9)
.
Рис. 5.9. До додавання обертального та поступального рухів
Задачі до розділу 5
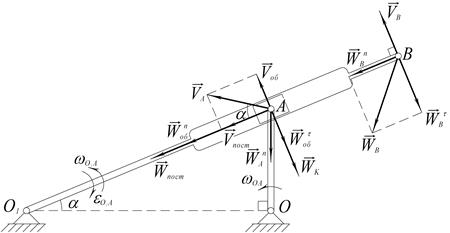
Задача 5.1.Кривошип довжиною 0,25 м рівномірно обертається навколо точки з кутовою швидкістю сі приводить в рух кулісу . Визначити швидкість і прискорення точки , якщо м,м і в даний момент м (рис. 1).
Рис. 1. До розв’язку задачі 5.1.
Розв’язання.
1. Визначення швидкостей. B заданому положенні механізму ,так як
.
При цьому
м/с; ;
; .
Камінь куліси разом з точкою здійснює складний рух: відносний – поступальний з швидкістю вздовж напрямної і переносний – обертальний навколо точки разом з напрямною із швидкістю .
За теоремою про додавання швидкостей при складному русі, маємо
або
(1)
.
Із рис. 1 визначаємо
м/с.
З іншого боку
,
звідки
с-1.
Тоді
м/с.
2. Визначення прискорень. Для повзуна , який здійснює складний рух, запишемо теорему про додавання прискорень
(2)
,
де
м/с2; ;
(рух кривошипа рівномірний);
м/с2; ;
м/с2; ;
; ;
.
Напрямки прискорень зображено на рис. 1. Спроектуємо векторну рівність (2) на пряму і пряму, перпендикулярну до .
: ; : .
Підставляємо числові значення
м/с2; м/с2.
Тоді
с-2.
Визначимо складові прискорення точки
м/с2; м/с2.
Повне прискорення точкивизначається за формулою
м/с2.
Задача 5.2. Кільцева трубка радіусом м рівномірно обертається навколо діаметра з кутовою швидкістю с-1. В середині трубки рухається рідина за законом (м). Визначити величину абсолютного прискорення частинки рідини в момент часу с (рис. 2).
Рис. 2. До розв’язку задачі 5.2.
Розв’язання. Частинка рідини здійснює складний рух. Розділимо цей рух на відносний і переносний «методом зупинки». За матеріальну точку виберемо частинку рідини. Рухомим твердим тілом будемо вважати трубку (з нею буде зв’язана рухома система відліку). Якщо умовно зупинимо рухому систему відліку (трубку), то одержимо відносний рух. Це буде рух частинки по колу за законом . Для відділення переносного руху умовно зупинимо частинку рідини. Це буде обертальний рух точки разом з трубкою навколо осі .
Запишемо кінематичні характеристики точки при її відносному і переносному рухах.
м/с; ; м/с2;
; ; ;
; ;
(обертальний рух рівномірний).
Прискорення Коріоліса визначаємо за формулою
,
де – кут між вектором і віссю .
Визначимо положення частинки в трубці при с
м.
Довжина трубки визначається із співвідношення
м.
Тоді
.
Це означає, що кут між векторами і дорівнює . Тоді
м.
Визначаємо числові значення швидкостей і прискорень точки в момент часу с
м/с; ; м/с2; м/с;
м/с2; ; м/с2.
Напрямки швидкостей і прискорень для точки зображено на рис. 2.
Абсолютні швидкість і прискорення точки визначаємо за теоремами про додавання швидкостей і прискорень при складному русі точки
(1)
;
(2)
.
Оскільки , то
м/с;
Спроектуємо рівняння (2) на осі системи координат, побудованої в точці
м/с2; м/с2; м/с2.
Тоді
м/с2.
Задача 5.3. Кривошип здійснює рівномірний обертальний рух навколо точки з частотою об/хв, а зубчасте колесо 1 обертається в протилежному напрямку з частотою об/хв. Визначити частоту обертання колеса 2, якщо , ( – число зубців коліс 1 та 2 відповідно) (рис. 3).
Розв’язання. Колеса 1 та 2 перебувають в зачепленні, тому швидкість спільної точки однакова для обох коліс.
Для колеса 1
; .
Рис. 3. До розв’язку задачі 5.3.
Визначаємо швидкість точки , яка одночасно належить кривошипу і колесу 2
; .
Колесо 2 здійснює складний (плоскопаралельний рух), який можна розглядати як миттєвий обертальний рух навколо МЦШ (в даному випадку точка ).
Позначивши через кутову швидкість колеса 2, можна записати
;
З останніх рівностей визначаємо
(1)
.
Оскільки радіуси коліс пропорційні числам їх зубців, то
; .
З умови (1) знаходимо
.
Помноживши останню рівність на , одержимо
об/хв.
Задача 5.4.Зубчасте колесо 1 закріплено нерухомо. Кривошип , обертаючись навколо точки з частотою об/хв, приводить в рух зубчасті колеса 2 і 3 (рис. 4). Визначити кутові швидкості цих коліс, якщо м; м; м.
Рис. 4. До розв’язку задачі 5.4.
Розв’язання: Визначаємо кутову швидкість кривошипа
с-1.
Швидкості точок кривошипа визначаємо за формулами
м/с, ;
м/с, .
Такі ж самі швидкості мають точки якщо вони належать відповідним колесам.
Колесо 1 нерухоме, тому . Точка співпадає з МЦШ для колеса 2, яке здійснює складний (плоскопаралельний) рух. Для точок цього колеса маємо
; .
Тоді
с-1; м/с.
Колесо 3 здійснює складний (плоскопаралельний) рух. Відомо швидкості двох його точок . Будуємо МЦШ для цього колеса (точка ).
Розглядаючи рух колеса 3 як миттєвий обертальний навколо точки з кутовою швидкістю , можна записати
 належить одночасно осям
належить одночасно осям  і
і  , то її швидкість в будь-який момент часу дорівнює нулю. Розглянемо точку
, то її швидкість в будь-який момент часу дорівнює нулю. Розглянемо точку  , яка визначає кінець вектора
, яка визначає кінець вектора  , побудованого за правилом паралелограма. За теоремою про додавання
, побудованого за правилом паралелограма. За теоремою про додавання
 .
.
 :
:
 ;
;  .
.
 ;
;  .
.
 .
.
 ,
,
 рідини здійснює складний рух. Розділимо цей рух на відносний і переносний «методом зупинки». За матеріальну точку виберемо частинку
рідини здійснює складний рух. Розділимо цей рух на відносний і переносний «методом зупинки». За матеріальну точку виберемо частинку  . Для відділення переносного руху умовно зупинимо частинку рідини. Це буде обертальний рух точки разом з трубкою навколо осі
. Для відділення переносного руху умовно зупинимо частинку рідини. Це буде обертальний рух точки разом з трубкою навколо осі  .
.
 ;
;
 .
.
 , яка одночасно належить кривошипу
, яка одночасно належить кривошипу  .
.

 ) та (
) та (  ). Кожна точка
). Кожна точка  твердого тіла здійснює складний рух, тому на підставі теорем про додавання швидкостей і прискорень при складному русі (п. 5.1) маємо, що
твердого тіла здійснює складний рух, тому на підставі теорем про додавання швидкостей і прискорень при складному русі (п. 5.1) маємо, що ;
;  .
. результуючий рух буде поступальним з швидкістю
результуючий рух буде поступальним з швидкістю  здійснює два незалежні обертальні рухи з кутовими швидкостями
здійснює два незалежні обертальні рухи з кутовими швидкостями  відносно нерухомих осей
відносно нерухомих осей  .
. та
та  колінеарні , тому
колінеарні , тому  . Це означає , що в заданий момент часу точка
. Це означає , що в заданий момент часу точка  , яка визначається точками
, яка визначається точками  . Отже, результуючим миттєвим рухом буде обертання навколо осі
. Отже, результуючим миттєвим рухом буде обертання навколо осі  .
. .
. цього руху дорівнює геометричній сумі кутових швидкостей
цього руху дорівнює геометричній сумі кутових швидкостей  . З плином часу вісь
. З плином часу вісь  відповідно.
відповідно. тіла площиною
тіла площиною  , перпендикулярною
, перпендикулярною 
 ;
;  .
. та
та  . В перетині з відрізком
. В перетині з відрізком  одержимо точку
одержимо точку  , через яку проходить миттєва вісь обертання.
, через яку проходить миттєва вісь обертання. ;
;  .
. – кутова швидкість миттєвого обертального руху навколо осі
– кутова швидкість миттєвого обертального руху навколо осі  ;
;  .
. Нехай кутові швидкості
Нехай кутові швидкості  . Зобразимо як і в попередньому випадку, переріз
. Зобразимо як і в попередньому випадку, переріз  ,
, .
. знаходимо остаточно
знаходимо остаточно . Така сукупність обертальних рухів називається парою обертань. На підставі формул (5.11) маємо
. Така сукупність обертальних рухів називається парою обертань. На підставі формул (5.11) маємо ;
;  .
. , величина якої дорівнює
, величина якої дорівнює  , напрямленої перпендикулярно до площини векторів
, напрямленої перпендикулярно до площини векторів  . Напрямок вектора
. Напрямок вектора  В залежності від кута між векторами
В залежності від кута між векторами  ). На підставі теореми Ейлера (п. 4.2) такий рух є плоскопаралельним, а отже миттєвим обертальним навколо осі, яка паралельна
). На підставі теореми Ейлера (п. 4.2) такий рух є плоскопаралельним, а отже миттєвим обертальним навколо осі, яка паралельна  таких, що
таких, що  а
а  (рис. 5.7). При цьому відстань
(рис. 5.7). При цьому відстань  визначаємо із рівності
визначаємо із рівності  , звідки
, звідки .
. при додаванні дають нульовий вектор і ми одержуємо, що рух тіла можна розглядати як миттєве обертання навколо осі
при додаванні дають нульовий вектор і ми одержуємо, що рух тіла можна розглядати як миттєве обертання навколо осі  з кутовою швидкістю
з кутовою швидкістю  2. Гвинтовий рух. Якщо складний рух тіла складається з обертального руху навколо нерухомої осі
2. Гвинтовий рух. Якщо складний рух тіла складається з обертального руху навколо нерухомої осі  ), то такий рух тіла називається гвинтовим. Вісь
), то такий рух тіла називається гвинтовим. Вісь  , то гвинт називається правим, при
, то гвинт називається правим, при  – лівим. Кожна точка при гвинтовому русі описує гвинтову лінію. Швидкість довільної точки
– лівим. Кожна точка при гвинтовому русі описує гвинтову лінію. Швидкість довільної точки  від осі гвинта обчислюється за формулою
від осі гвинта обчислюється за формулою .
. по дотичній до гвинтової лінії (рис. 5.8).
по дотичній до гвинтової лінії (рис. 5.8). так, що
так, що  , а
, а  . Замінивши швидкість
. Замінивши швидкість  парою кутових швидкостей
парою кутових швидкостей  та
та  , тобто гвинтовий рух навколо осі
, тобто гвинтовий рух навколо осі  (рис. 5.9 б). Відстань
(рис. 5.9 б). Відстань  .
.
 с
с  і приводить в рух кулісу
і приводить в рух кулісу  . Визначити швидкість і прискорення точки
. Визначити швидкість і прискорення точки  , якщо
, якщо  м,
м,  м і в даний момент
м і в даний момент  м (рис. 1).
м (рис. 1).  ,так як
,так як .
. м/с;
м/с;  ;
; ;
;  .
. вздовж напрямної
вздовж напрямної  і переносний – обертальний навколо точки
і переносний – обертальний навколо точки  .
. м/с.
м/с. ,
, с-1.
с-1. м/с.
м/с. м/с2;
м/с2;  ;
; (рух кривошипа
(рух кривошипа  м/с2;
м/с2;  ;
; м/с2;
м/с2;  ;
; ;
;  ;
; .
. :
:  ;
;  :
:  .
. м/с2;
м/с2;  м/с2.
м/с2. с-2.
с-2. м/с2;
м/с2;  м/с2.
м/с2. м/с2.
м/с2. Задача 5.2. Кільцева трубка радіусом
Задача 5.2. Кільцева трубка радіусом  м рівномірно обертається навколо діаметра
м рівномірно обертається навколо діаметра  с-1. В середині трубки рухається рідина за законом
с-1. В середині трубки рухається рідина за законом  (м). Визначити величину абсолютного прискорення частинки
(м). Визначити величину абсолютного прискорення частинки  с (рис. 2).
с (рис. 2). м/с;
м/с;  ;
;  м/с2;
м/с2; ;
;  ;
;  ;
; ;
;  ;
; (обертальний рух рівномірний).
(обертальний рух рівномірний). ,
, – кут між вектором
– кут між вектором  і віссю
і віссю  м.
м. м.
м. .
. і
і  дорівнює
дорівнює  . Тоді
. Тоді м.
м. м/с;
м/с;  ;
;  м/с2;
м/с2;  м/с;
м/с; м/с2;
м/с2;  ;
;  м/с2.
м/с2. , то
, то м/с;
м/с; м/с2;
м/с2;  м/с2;
м/с2;  м/с2.
м/с2. м/с2.
м/с2. Задача 5.3. Кривошип
Задача 5.3. Кривошип  об/хв, а зубчасте колесо 1 обертається в протилежному напрямку з частотою
об/хв, а зубчасте колесо 1 обертається в протилежному напрямку з частотою  об/хв. Визначити частоту обертання колеса 2, якщо
об/хв. Визначити частоту обертання колеса 2, якщо  ,
,  (
(  – число зубців коліс 1 та 2 відповідно) (рис. 3).
– число зубців коліс 1 та 2 відповідно) (рис. 3). ;
;  .
. ;
;  кутову швидкість колеса 2, можна записати
кутову швидкість колеса 2, можна записати ;
; 
 ;
;  .
. .
. , одержимо
, одержимо об/хв.
об/хв. Задача 5.4.Зубчасте колесо 1 закріплено нерухомо. Кривошип
Задача 5.4.Зубчасте колесо 1 закріплено нерухомо. Кривошип  об/хв, приводить в рух зубчасті колеса 2 і 3 (рис. 4). Визначити кутові швидкості цих коліс, якщо
об/хв, приводить в рух зубчасті колеса 2 і 3 (рис. 4). Визначити кутові швидкості цих коліс, якщо  м;
м;  м;
м;  м.
м. с-1.
с-1. м/с,
м/с,  м/с,
м/с,  . Точка
. Точка  цього колеса маємо
цього колеса маємо .
. с-1;
с-1;  м/с.
м/с. . Будуємо МЦШ для цього колеса (точка
. Будуємо МЦШ для цього колеса (точка  ).
). , можна записати
, можна записати ;
; 
 .
. с-1.
с-1.