|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Плоскі кулачкові механізми
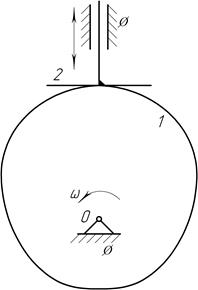
Кулачкові механізми мають широке застосування в машинобудуванні, оскільки за їх допомогою можна реалізувати різноманітні закони руху веденої ланки. Кінематичне призначення кулачкових механізмів полягає в перетворенні обертального або поступального руху ведучої ланки (кулачка) в поступальний або обертальний рух веденої ланки (штанги або штовхача), причому рух останньої може здійснюватися по наперед заданому закону (в тому числі із зупинками). В найпростішому випадку плоский кулачковий механізм визначається замкненим триланковим кінематичним ланцюгом однократної рухомості (рис. 6.55). Ланка 1 називається кулачком; вона надає заданий рух веденій ланці – штовхачу 2. Кожна з цих ланок утворює нижчу кінематичну пару із стойкою f (обертальну чи поступальну). Контури рухомих ланок 1, 2 перебувають у постійному контакті, утворюючи вищу кінематичну пару. Для зменшення зношування елементів вищої пари штовхач із загостренням на практиці замінюється штовхачем з роликом (рис. 6.56). При такій заміні лише вісь обертання ролика залишається незмінно зв’язною із штовхачем. При дослідженні кулачкового механізму з роликом завжди дійсний профіль кулачка потрібно замінити теоретичним (пунктирна лінія), який віддалений від дійсного профілю на величину радіуса ролика.
Рухомість механізму з роликом визначаємо за формулою Чебишева
Насправді рухомість кулачкового механізму дорівнює одиниці. Це пояснюється тим, що в розглядуваному механізмі ролик є “зайвою” ланкою. Періодичний рух веденої ланки 2 може бути поступальним або обертальним, що визначається прийнятою схемою механізму, формою окреслення кулачка 1 і видом його руху. Розглянемо деякі схеми плоских кулачкових механізмів, які мають широке застосування в різних галузях техніки. На рис. 6.57 зображено механізм з поступальним рухом кулачка 1 і поступальним рухом
Прикладом іншої різновидності кулачкового механізму може служити схема, наведена на
Рис. 6.59. Тарілчасті кулачкові механізми
Наведені схеми кулачкових механізмів і ряд інших широко застосовується в тих випадках, коли при неперервному русі ведучої ланки-кулачка необхідно змінювати по наперед заданому закону рух веденої ланки і, особливо, коли ця ланка повинна в процесі руху тимчасово зупинятися. Такий характер руху має місце в металообробних верстатах, в пресах і окремих типах ножиць, а також в механізмах газорозподілу двигунів внутрішнього згортання. Перевагою кулачкових механізмів є їх широка універсальність. Надаючи кулачку ту чи іншу форму, можна при компактних розмірах механізму одержати практично будь-який рух штовхача з довільним законом зміни таких параметрів як швидкість, прискорення чи траєкторія, що неможливо здійснити при використанні інших механізмів. Порівняно швидке зношування елементів вищої кінематичної пари і, як результат цього, неточність ходу штовхача, збільшення шуму характеризують недолік цих механізмів. Для уникнення розмикання геометрично незамкнених вищих пар у всіх наведених схемах кулачкових механізмів передбачено силове замикання за допомогою пружин. По взаємному розміщенню осей кулачка і штовхача ці механізми діляться на два типи – центральні і позацентрові. До першого типу відносяться кулачкові механізми з віссю штовхача, яка перетинає вісь кулачка (рис. 6.55), а до другого – зі зміщеною віссю (рис. 6.56). 6.4.1. Кінематичний аналіз плоских кулачкових механізмів. Основна задача кінематичного аналізу кулачкового механізму передбачає за заданим законом руху кулачка визначити швидкості і прискорення точок штовхача якщо він здійснює поступальний рух або кутові швидкості і кутові прискорення штовхача при його обертальному русі. Розв’язок задачі може бути як аналітичним, так і графічним. У першому випадку повинен бути відомим закон руху деякої точки штовхача На рис. 6.60 зображено центральний кулачковий механізм, в якому кулачок здійснює рівномірний обертальний рух з кутовою швидкістю
Рис. 6.60. Центральний кулачковий механізм
Для визначення закону руху штовхача цей механізм повинен бути викреслений для ряду положень кулачка в межах робочого кута повороту, що при складному профілі кулачка викликає відомі труднощі. Тому на практиці використовують метод обернення руху, який дозволяє без особливих труднощів визначати відносне положення ланок без повторного викреслювання кулачка. Для цього механізму умовно надаємо обертального руху навколо центра 1. поступальний вздовж своєї напрямної, по характеру такий же як і до обернення руху; 2. обертальний навколо точки Пряма Для побудови діаграми зміщення точки
Побудувавши 12 положень точки
Для цього в масштабі В точках поділу відкладаємо відрізки 1-1', 2-2',..., 11-11', які відповідають відрізкам Методом графічного диференціювання діаграми На підставі вищесказаного можна зробити висновок: при заданому законі руху кулачка графічним методом можна провести повне кінематичне дослідження руху веденої ланки. Якщо штовхач має ролик, то для побудови діаграми
Визначення швидкостей і прискорень методом планів. Розглянемо наведену на рис. 6.62 схему кулачкового механізму. Ведучою ланкою є кулачок 1, який обертається навколо центра
 . .
Прискорення точки
Графічна побудова планів (рис. 6.63, 6.64) не потребує пояснень, оскільки вона здійснена на загальних принципах, розглянутих в п. 6.2.2.
Рис. 6.63. План швидкостей кулачкового механізму, зображеного на рис. 6.62
Рис. 6.64. План прикорень кулачкового механізму, зображеного на рис. 6.62 (повернуто на 900 проти годинникової стрілки)
і зображених на рис. 6.66, 6.67. Для повного кінематичного аналізу механізму потрібно побудувати певну кількість замінюючих механізмів і відповідних їм планів швидкостей та прискорень.
Поиск по сайту: |


 .
.

 , а ведена ланка 2 – коливний рух навколо точки
, а ведена ланка 2 – коливний рух навколо точки  . Можливі і інші види кулачкових механізмів, в яких ведена ланка здійснює коливний або поступальний рухи (рис. 6.59).
. Можливі і інші види кулачкових механізмів, в яких ведена ланка здійснює коливний або поступальний рухи (рис. 6.59).
 . Швидкість і прискорення цієї точки визначаються шляхом диференціювання даного закону по часу. Ці ж параметри можуть бути визначені методами графічного диференціювання або планів швидкостей і прискорень.
. Швидкість і прискорення цієї точки визначаються шляхом диференціювання даного закону по часу. Ці ж параметри можуть бути визначені методами графічного диференціювання або планів швидкостей і прискорень. , а штовхач – поступальний. Вістря штовхача встановлено в точці, найменш віддаленій від осі кулачка.
, а штовхач – поступальний. Вістря штовхача встановлено в точці, найменш віддаленій від осі кулачка.
 . В результаті такого руху кулачок 1 умовно зупиниться, а штовхач 2 буде здійснювати два рухи:
. В результаті такого руху кулачок 1 умовно зупиниться, а штовхач 2 буде здійснювати два рухи: в оберненому русі також обертається з цією кутовою швидкістю навколо центра кулачка. Разом з тим ця пряма проходить через точку
в оберненому русі також обертається з цією кутовою швидкістю навколо центра кулачка. Разом з тим ця пряма проходить через точку  і є геометричною віссю штовхача. При поступальному русі штовхача центрального кулачкового механізму траєкторія точки
і є геометричною віссю штовхача. При поступальному русі штовхача центрального кулачкового механізму траєкторія точки 
 (радіус основної шайби кулачка), а інше найбільшого
(радіус основної шайби кулачка), а інше найбільшого  . Різниця
. Різниця  визначає максимальне віддалення вістря
визначає максимальне віддалення вістря  .
.
 . Оскільки рух кулачка рівномірний, то
. Оскільки рух кулачка рівномірний, то  . Сполучивши точки
. Сполучивши точки  до перетину з профілем кулачка в точках
до перетину з профілем кулачка в точках  . Кожна з цих точок розміщена на відповідній прямій
. Кожна з цих точок розміщена на відповідній прямій  .
.  , прийнявши до уваги, що
, прийнявши до уваги, що .
. , де
, де  – робочий час одного оберту кулачка,
– робочий час одного оберту кулачка,  – довжина відрізка в міліметрах, яким зображується цей час, відкладаємо на осі абсцис робочий час. Відрізок
– довжина відрізка в міліметрах, яким зображується цей час, відкладаємо на осі абсцис робочий час. Відрізок  або кута повороту
або кута повороту  .
. в масштабі
в масштабі  , де
, де  ,
,  – коефіцієнт збільшення чи зменшення кінематичної схеми. З’єднавши неперервною лінією точки 0, 1', 2',..., 11', 12, одержимо діаграму
– коефіцієнт збільшення чи зменшення кінематичної схеми. З’єднавши неперервною лінією точки 0, 1', 2',..., 11', 12, одержимо діаграму  , а повторним диференціюванням – діаграму прискорення
, а повторним диференціюванням – діаграму прискорення  .
. (
( 
 Рис. 6.61. Діаграма зміщення точки В
Рис. 6.61. Діаграма зміщення точки В . Розміри всіх ланок задані. Визначимо швидкість і прискорення штовхача 2 в заданому положенні механізму методом планів. Ланка 2 має ролик, тому попередньо побудуємо теоретичний профіль кулачка. Нехай
. Розміри всіх ланок задані. Визначимо швидкість і прискорення штовхача 2 в заданому положенні механізму методом планів. Ланка 2 має ролик, тому попередньо побудуємо теоретичний профіль кулачка. Нехай  центр кривини теоретичного профілю в
центр кривини теоретичного профілю в  , фіктивним шатуном
, фіктивним шатуном  .
. .
.

 Якщо замість штовхача, який здійснює поступальний рух, до схеми включена коливна ланка
Якщо замість штовхача, який здійснює поступальний рух, до схеми включена коливна ланка  , то замінюючим механізмом буде шарнірний чотириланковик
, то замінюючим механізмом буде шарнірний чотириланковик  (рис. 6.65), для якого швидкість і прискорення точки
(рис. 6.65), для якого швидкість і прискорення точки 

 та
та 