|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Структурний аналіз механізмів та їх класифікація
Структурний аналіз механізмів передбачає розгляд питань утворення, видозміни і побудови механізмів, а також послідовність і способи з’єднання окремих їх частин. Закономірний рух матеріальних тіл, як складових частин механізму, мислимий лише при їх з’єднанні між собою таким чином, щоб заданому руху одного або кількох з них відповідав визначений рух решти. Найпростіша частина механізму у вигляді одного твердого тіла, що має визначену, наперед задану, форму і розміри називається деталлю. Частина механізму, яка складається з однієї або декількох деталей, з’єднаних між собою нерухомо називається ланкою. По відношенню до інших частин механізму ланка повинна мати відносну рухомість. 6.1.1. Кінематичні пари та їх класифікація.Кінематичною парою називається рухоме з’єднання двох ланок. Множина спільних точок цих ланок називається елементом кінематичної пари. Дві ланки, об’єднані в кінематичну пару, можуть здійснювати визначений рух одна відносно іншої. При цьому завжди можна вважати, що одна з ланок нерухома, а інша здійснює відносний рух. Об’єднання двох ланок в кінематичну пару накладає певні обмеження на їх відносний рух. Число таких обмежень називається класом кінематичної пари. Кінематичні пари класифікуються за: 1) видом елементів кінематичних пар; 2) характером відносного рух ланок; 3) числом обмежень, які накладаються на відносний рух ланок. За першою ознакою кінематичні пари поділяються на нижчі і вищі. Нижчою називається така кінематична пара елементом якої є поверхня скінчених розмірів. Прикладами таких пар є поступальна і обертальна (рис. 6.5). Якщо елементом кінематичної пари є частина лінії або точка, то кінематична пара називається вищою (рис. 6.1). Всі нижчі кінематичні пари володіють властивістю оборотності (інверсії), суть якої полягає в тому, що характер відносного руху не залежить від того, яка з двох ланок буде закріплена. Вищі кінематичні пари властивістю оборотності не володіють. За другою ознакою кінематичні пари поділяються на просторові і плоскі. Якщо відносний рух ланок здійснюється в одній або паралельних площинах, то така кінематична пара називається плоскою. У всіх інших випадках кінематична пара називається просторовою. За третьою ознакою кінематичні пари поділяються на п’ять класів у просторовому русі. До першого класу відносяться пари, які накладають лише одне обмеження на відносний рух ланок, до другого – два обмеження і т.д. Так, наприклад, куля, яка розміщена між двома паралельними площинами, не може здійснювати рух вздовж прямої, що проходить через точки її дотику з площинами. Тим самим одна ступінь вільності виключається, а решта п’ять можливі (рис. 6.1).
Очевидно, що такою кінематичною парою накладається лише одне обмеження, тому її необхідно віднести до першого класу. Якщо кулю помістити в циліндр такого ж діаметра, то неможливими стануть два поступальних рухи вздовж двох взаємно перпендикулярних осей в площині, яка перпендикулярна осі циліндра. Це кінематична пара другого класу (рис. 6.2). Якщо кулю помістити в іншу кулю так, щоб вона всіма точками дотикалася внутрішніх точок останньої, то можливими залишаться тільки три обертальних рухи навколо трьох взаємноперпендикулярних осей. Це означає, що така кінематична пара накладає три обмеження на відносний рух ланок і визначає третій клас даної пари (рис. 6.3).
 
Прикладом кінематичної пари четвертого класу може бути циліндрична пара, де можливими рухами є поступальний вздовж осі циліндра і обертальний навколо цієї осі. Число обмежень на відносний рух ланок дорівнює чотирьом (рис. 6.4). Кінематичні пари, зображені на рис. 6.5 відносяться до п’ятого класу, так як кожна з них має лише одну ступінь вільності. Ці пари називаються відповідно поступальною та обертальною.
Рис. 6.5. Кінематичні пари п’ятого класу
Клас кінематичної пари не може дорівнювати нулю або шести, бо в першому випадку з’єднання ланок нерухоме, а в другому – ланки не об’єднані в кінематичну пару. В плоскому русі твердих тіл число класів, очевидно, не може бути більше ніж два, тобто на три менше ніж при просторовому русі. Схематичне зображення нижчих і вищих кінематичних пар різних видів показано на рис. 6.6.
Рис. 6.6. Схематичне зображення вищих і нижчих кінематичних пар: а, б, в – обертальні пари; г, д – поступальні пари; е – гвинтова пара; є, ж – вищі пари.
Умовні позначення ланок наведено на рис. 6.7. Зазвичай ланки зображуються у відірваному вигляді від дійсної (конструктивної) їх форми: а – ланка з елементами обертальних пар
Рис. 6.7. Умовні позначення ланок
6.1.2. Кінематичні ланцюги та їх класифікація.Кінематичним ланцюгом називається послідовне (а) або розгалужене (б) з'єднання ланок за допомогою кінематичних пар (рис. 6.8). Кінематичні ланцюги поділяються на прості та складні, замкнені і незамкнені, просторові і плоскі. Приклад незамкненого простого кінематичного ланцюга зображено на рис. 6.8 а, а складного – на рис. 6.8 б.
Рис. 6.8. Кінематичні ланцюги
До складу простого незамкненого кінематичного ланцюга входять ланки з одним і двома елементами кінематичних пар, чим зумовлена можливість приєднання до нього не більше двох інших ланок до кожної з них, крім першої та останньої, які не містять елементів кінематичних пар на вільних кінцях. Загальна кількість кінематичних пар в незамкненому ланцюгу завжди на одиницю менша від числа ланок. До складного ланцюга входять також ланки, які допускають приєднання до них більше, ніж дві ланки (рис. 6.8 б). Простий замкнений кінематичний ланцюг одержується з незамкненого, якщо першу ланку рухомо з'єднати з останнього, для чого вони обидві повинні містити елементи кінематичних пар на вільних кінцях. В результаті цього буде утворено лише один замкнений контур (рис. 6.8 в, г). Таким же способом із незамкненого складного кінематичного ланцюга може бути одержаний замкнений складний кінематичний ланцюг з декількома замкненими контурами (рис. 6.9).
Рис. 6.9. Складний замкнений кінематичний ланцюг
Кінематичний ланцюг називається плоским, якщо всі його ланки рухаються в одній або паралельних площинах. У всіх інших випадках кінематичний ланцюг називається просторовим. Плоскі замкнені кінематичні ланцюги набули широкого розповсюдження на практиці. В подальшому будемо розглядати лише плоскі стержневі системи. 6.1.3. Механізм, як замкнений кінематичний ланцюг. В залежності від кількості ланок і кінематичних пар в замкненому кінематичному ланцюгу число степенів вільності може бути різним. Якщо одну ланку такого ланцюга закріпити, то число степенів вільності зменшується на шість при просторовому русі або на три при плоскому. В результаті цього рух ланок ланцюга відносно закріпленої ланки стане абсолютним. Це дає змогу сформулювати інше означення механізму: механізмом називається замкнений кінематичний ланцюг з однією нерухомою ланкою, в якому за заданим рухом однієї або кількох ланок можна однозначно визначити рух решти ланок. Ланки механізму, рух яких задано, називаються ведучими, всі інші рухомі ланки – веденими. Число ведучих ланок будемо називати класом механізму. Нерухома ланка механізму називається стойкою. При цьому нерухомість стойки слід розуміти відносно, так як машина, до складу якої входить механізм, може бути стаціонарною або пересувною. В першому випадку стойка складає одне ціле з фундаментом на землі. Для випадку, коли механічна система рухається (автомобіль, літак, тепловоз і інші), нерухомою ланкою вважається рама, хоча вона фактично переміщається відносно землі. Рухомістю механізму називається число незалежних рухів, які здійснюють його ланки. Як відомо, якщо на рух ланки, яка здійснює плоский рух, не накладено ніяких обмежень, то вона має три степені вільності. Тому, якщо допустити, що в складі замкненого кінематичного ланцюга є Нехай Оскільки кожна пара першого класу накладає лише одне обмеження, то загальне число обмежень, які накладаються цими парами дорівнює
 – число рухомих ланок механізму. Оскільки для плоского механізму всі кінематичні пари другого класу нижчі, а пари першого класу – вищі, то формулу (6.1) можна записати так – число рухомих ланок механізму. Оскільки для плоского механізму всі кінематичні пари другого класу нижчі, а пари першого класу – вищі, то формулу (6.1) можна записати так
Тут Важливе значення цієї формули полягає в тому, що вона дозволяє за числом ланок і кінематичних пар визначати рухомість стержневих систем. 6.1.4. Класифікація плоских механізмів з нижчими кінематичними парами. Російським механіком Л.В. Ассуром запропонована раціональна класифікація плоских механізмів. Важливе теоретичне значення такої класифікації полягає в тому, що вона поділяє всі плоскі механізми на ряд видів і тим самим дозволяє не тільки розбиратися в самих складних схемах, але й пропонувати відповідні їм кінематичні і динамічні методи дослідження.
або
З останньої залежності випливає, що число ланок в приєднуваній групі, рухомість якої
 ) з рівняння (6.2) знаходимо ) з рівняння (6.2) знаходимо
Формула (6.4) визначає структуру найпростішого механізму однократної рухомості. Приймаючи
 
Початковий механізм з обертальною ведучою ланкою (рис. 6.10 а) будемо називати кривошипом, а механізм з поступальною ведучою ланкою – повзуном (рис. 6.10 б). Для визначення структури приєднуваного кінематичного ланцюга нулькратної рухомості розглянемо формулу (6.3). Покладаючи в ній На рис. 6.11 зображено різні види діад (двоповодкових груп). Приєднуючи до початкового механізму всеможливі двоповодкові групи, можна одержати такі механізми однократної рухомості: Кривошипно-повзунковий механізм
Рис. 6.12. Кривошипно-повзунковий механізм: ОА – кривошип; АВ – шатун; В – повзунок.
Кривошипно-коромисловий механізм
Рис. 6.13. Кривошипно-коромисловий механізм: ОА – кривошип; АВ – шатун; ВО1 – балансир (коромисло).
Кулісний механізм
Рис. 6.14. Кривошипно-коромисловий механізм: ОА – кривошип; АО1 – куліса; А – камінь куліси.
Якщо у (6.3) покласти
Якщо таку структурну групу приєднати до ведучої ланки і стойки, то ми одержимо механізм, зображений на рис. 6.16. Порядком структурної групи механізму називається число вільних елементів (поводків), які містить ця група. Таким чином, початковий механізм має перший порядок, діада – другий, Порядок механізму визначають максимальним порядком її структурних груп. Так всі механізми, зображені на рис. 6.12, 6.13, 6.14, мають другий порядок, а механізм на рис. 6.16 – третій порядок. 6.1.5. Структурний аналіз плоских механізмів з нижчими кінематичними парами.Задача структурного аналізу плоского механізму з нижчими кінематичними парами передбачає: визначення рухомості механізму; розклад механізму на структурні одиниці (початковий механізм і групи Ассура); визначення класу і порядку структурних одиниць та механізму в цілому. Розв’язок задачі проілюструємо на прикладі механізму, зображеному на рис. 6.17.
Рис. 6.17. Приклад механізму другого порядку
Елементи кінематичних пар будемо позначати великими буквами латинського алфавіту, які будемо називати іменами кінематичних пар. Рухомі ланки позначимо арабськими числами 1, 2, 3, і т. д. Нерухому ланку (стойку) відзначимо символом f . Запишемо структурну таблицю для заданого механізму
Рухомість механізму визначається за формулою (6.2). В даному випадку Оскільки механізм має однократну рухомість, то його можна розкласти на структурні
Рис. 6.18. Структурний аналіз механізму
Структурна формула побудови механізму має вигляд

і називається монтажною схемою механізму. Зауважимо, що розклад механізму на структурні групи здійснюється неоднозначно і залежить від вибору початкового механізму. Так, наприклад, в кривошипно-повзунковому механізмі (рис. 6.12) початковим механізмом може бути як кривошип 6.1.6. Заміна вищих кінематичних пар нижчими. Класифікацією Ассура охоплені лише механізми з нижчими кінематичними парами, тому при структурному аналізі механізмів з вищими парами необхідно умовно замінювати їх кінематично еквівалентними механізмами з нижчими парами. При цьому характер відносного руху ланок повинен залишатися таким же як і у вихідному механізмі. Для плоских механізмів достатньо розглянути питання про заміну пар лише першого класу. На рис. 6.19 зображено триланковий механізм з однією вищою кінематичного парою
 і і  відповідно, які обертаються навколо точок відповідно, які обертаються навколо точок  і і  . При постійному контакті ланок відстань . При постійному контакті ланок відстань  , яка дорівнює сумі радіусів кіл, залишається незамінною в процесі руху. Не будуть змінюватися в процесі руху відстані і . Незмінність цих розмірів дозволяє жорстко зв’язати із заданим механізмом чотириланковий кривошипно-коромисловий механізм , яка дорівнює сумі радіусів кіл, залишається незамінною в процесі руху. Не будуть змінюватися в процесі руху відстані і . Незмінність цих розмірів дозволяє жорстко зв’язати із заданим механізмом чотириланковий кривошипно-коромисловий механізм  з нижчими кінематичними парами, в якому за заданим рухом однієї ланки однозначно визначається рух решти ланок. Цей механізм вже не містить вищої пари. Вона замінена однією фіктивною ланкою і двома обертальними парами з нижчими кінематичними парами, в якому за заданим рухом однієї ланки однозначно визначається рух решти ланок. Цей механізм вже не містить вищої пари. Вона замінена однією фіктивною ланкою і двома обертальними парами 
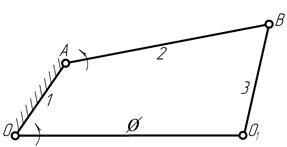
і Суть проблеми і спосіб заміни залишаються такими ж і для випадку, коли рухомі ланки окреслені плоскими гладкими кривими довільного виду, так як точка дотику ланок завжди розміщена на прямій, що з’єднує їх центри кривини (рис. 6.20). Те, що радіуси кривини в точках дотику при різних положеннях ланок будуть різними, справи не змінює і на визначення класу та порядку механізму не впливає. Миттєвий рух заданого механізму з вищою парою може бути відтворений за допомогою кінематично еквівалентного шарнірного механізму Випадок, коли точка Як видно з цього рисунка, кінематично еквівалентний механізм Таким чином, проведення заміни вищих пар нижчими дозволяє перенести методи структурного аналізу механізмів з нижчими кінематичними парами на механізми з вищими кінематичними парами. 6.1.7. Умови існування кривошипа в чотириланковому важільному механізмі. Встановимо, при якому співвідношенні розмірів ланок чотириланкового механізму (рис. 6.22) можливе існування одного чи двох кривошипів або не можливе існування жодного.
Якщо ланка 1 (кривошип) буде ведучою, то при одному її обертанні навколо осі
Рис. 6.24. Мертві положення механізму
Використовуючи нерівності трикутника (довжина сторони трикутника менша ніж сума довжин двох інших сторін), у відповідності до рис. 6.24 б можна записати
Співвідношення (6.6)-(6.8) дозволяють зробити такий висновок: для того, щоб ланка Легко перевірити, що умови (8.6)-(8.8) будуть виконуватися, якщо за стойку вибрати З вище сказаного випливає, що якщо кривошип
Частковий випадок двокривошипного чотириланкового механізму показано на рис. 6.26, де протилежні ланки мають однакові довжини і паралельні. В граничних положеннях механізму (точки Для переходу через мертві положення в паралелограмних механізмах застосовуються додаткові кінематичні ланцюги, які зсунуті відносно даного на деякий кут.
Рис. 6.27. Мертві положення паралелограмного механізму
На рис. 6.27 а такий ланцюг Останнім варіантом є перетворення в стойку ланки
В цьому випадку нерівності (6.6)-(6.8) не виконуються і розглянутий механізм не має жодного кривошипа. Ланки
Поиск по сайту: |





 на кінцях; б, в – ланка 1, до якої за допомогою обертальних пар
на кінцях; б, в – ланка 1, до якої за допомогою обертальних пар  приєднані ланки 2, 3 і 4; г – до ланки 1 приєднані ланки 2, 3, причому остання за допомогою поступальної пари
приєднані ланки 2, 3 і 4; г – до ланки 1 приєднані ланки 2, 3, причому остання за допомогою поступальної пари 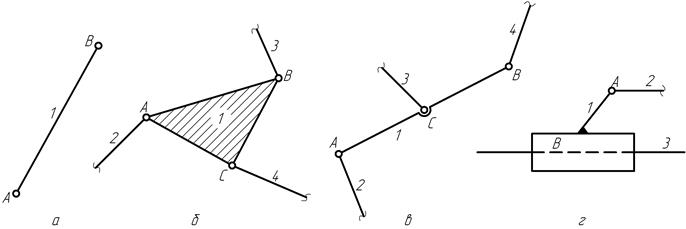


 ланок, то всі вони разом взяті до об'єднання в ланцюг з допомогою кінематичних пар мають
ланок, то всі вони разом взяті до об'єднання в ланцюг з допомогою кінематичних пар мають  степенів вільності.
степенів вільності. число кінематичних пар першого і другого класу відповідно в розглядуваному ланцюгу.
число кінематичних пар першого і другого класу відповідно в розглядуваному ланцюгу. . По аналогії, кожна кінематична пара другого класу накладає два обмеження, тому їх загальна кількість буде
. По аналогії, кожна кінематична пара другого класу накладає два обмеження, тому їх загальна кількість буде  . Рухомість кінематичного ланцюга буде дорівнювати різниці між числом можливих степенів вільності і загальним числом обмежень
. Рухомість кінематичного ланцюга буде дорівнювати різниці між числом можливих степенів вільності і загальним числом обмежень .
. ,
, .
. – кількість нижчих пар,
– кількість нижчих пар,  – кількість вищих пар. Залежність (6.2) має назву структурної формули Чебишева для визначення рухомості плоского механізму.
– кількість вищих пар. Залежність (6.2) має назву структурної формули Чебишева для визначення рухомості плоского механізму. ,
, .
. , повинно бути завжди парним, інакше число кінематичних пар
, повинно бути завжди парним, інакше число кінематичних пар  .
. , знаходимо
, знаходимо  . Це означає, що такий механізм повинен складатися лише з однієї рухомої ланки і стойки, з’єднаних між собою однією нижчою кінематичною парою. Такий механізм будемо називати початковим або механізмом першого класу першого порядку.
. Це означає, що такий механізм повинен складатися лише з однієї рухомої ланки і стойки, з’єднаних між собою однією нижчою кінематичною парою. Такий механізм будемо називати початковим або механізмом першого класу першого порядку. , одержуємо
, одержуємо  . На підставі цього приходимо до висновку, що найпростіша структурна група (діада), яка може бути приєднана до вихідного механізму містить дві рухомі ланки (поводки), які з’єднані кінематичною парою і два вільні елементи для приєднання до вихідного механізму і стойки.
. На підставі цього приходимо до висновку, що найпростіша структурна група (діада), яка може бути приєднана до вихідного механізму містить дві рухомі ланки (поводки), які з’єднані кінематичною парою і два вільні елементи для приєднання до вихідного механізму і стойки.


 , то
, то  і одержимо структурну групу, яка містить чотири рухомих ланки, три кінематичні пари і три вільні елементи для приєднання до вихідного механізму і стойки. Така структурна група називається триповодковою або тріадою. Один із варіантів тріади наведено на рис. 6.15.
і одержимо структурну групу, яка містить чотири рухомих ланки, три кінематичні пари і три вільні елементи для приєднання до вихідного механізму і стойки. Така структурна група називається триповодковою або тріадою. Один із варіантів тріади наведено на рис. 6.15.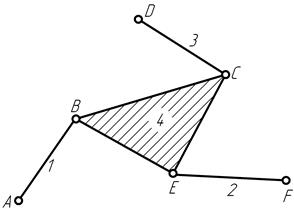



 ,
,  ,
,  Тоді
Тоді .
.



 . До механізму входить двоповодкова структурна група
. До механізму входить двоповодкова структурна група  , тому він має перший клас і другий порядок. Очевидно, що такий клас і порядок має розглядуваний механізм з вищою кінематичною парою.
, тому він має перший клас і другий порядок. Очевидно, що такий клас і порядок має розглядуваний механізм з вищою кінематичною парою. містить фіктивну ланку
містить фіктивну ланку  і дві фіктивні обертальні пари
і дві фіктивні обертальні пари 

 .
.
 ;
;  ,
, ;
;  .
. .
.

 .
. .
.

 розміщені на одній прямій), які називаються мертвими, його рух буде невизначеним, оскільки може бути подвійний вихід із мертвого положення. Інакше кажучи, ланки 1 і 3, при відхиленні від спільної прямої
розміщені на одній прямій), які називаються мертвими, його рух буде невизначеним, оскільки може бути подвійний вихід із мертвого положення. Інакше кажучи, ланки 1 і 3, при відхиленні від спільної прямої 
 зображено штриховою лінією. При наявності такого доповнення відбувається примусовий рух в мертвих положеннях механізмів.
зображено штриховою лінією. При наявності такого доповнення відбувається примусовий рух в мертвих положеннях механізмів. (рис. 6.28).
(рис. 6.28).