|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Механізми для передачі обертального руху
Передача обертального руху від одного вала до іншого здійснюється за допомогою деталей, закріплених на валах, які взаємодіють між собою безпосередньо або через гнучку ланку. До передач з безпосереднім контактом відносяться найбільш поширені передачі зчепленням і фрикційні передачі, а до механізмів з гнучкими ланками – пасові, ланцюгові і інші. В обох випадках осі валів можуть бути паралельними або такими, що перетинаються, і мимобіжними. При паралельних валах механізми відносяться до плоских, а в інших випадках – до просторових. 6.3.1 Механізми з жорсткими ланками для передачі обертального руху. Для передачі обертального руху від однієї осі до іншої, паралельної їй, використовуються різні механізми із зубчастими циліндричними колесами. Плоскі циліндричні зубчасті передачі з круглими колесами. В найпростішому випадку ці механізми триланкові і мають однократну рухомість. Вони служать для передачі неперервного обертального руху від однієї ланки до іншої із сталим відношенням кутових швидкостей. Відсутність пробуксовки забезпечується наявністю в коліс зубців, тому колеса називаються зубчастими, а сама передача – зубчастою передачею. При обертанні одного з коліс його зубці входять в зчеплення із зубцями іншого колеса і змушують його обертатися. Якщо зубці обох коліс розміщені на їх зовнішніх поверхнях, то така передача називається циліндричною із зовнішнім зчепленням. В цій передачі вали обертаються в протилежних Якщо зубці одного з коліс нарізані на внутрішній його поверхні, а іншого – на зовнішній, то маємо циліндричну передачу із внутрішнім зчепленням. В такій передачі вали обертаються в одному Оскільки між зубчастими колесами відсутнє проковзування (пробуксовка), то швидкість спільної точки для обох коліс однакова
або
де Не порушуючи загальності, будемо вважати, що колесо 1 ведуче, а 2 – ведене. Передаточним відношенням рядової зубчастої передачі будемо називати число
 . .
В співвідношенні (6.18) кутові швидкості можуть бути від’ємними (якщо обертальний рух відбувається в напрямку обертання годинникової стрілки), тому для передачі із зовнішнім
Рис. 6.44. Зовнішня та внутрішня циліндрична зубчаста передача
Передаточне відношення При практичному виготовленні зубчастих коліс із умови непідрізання зубців вважаються найбільш оптимальними такі діапазони числа зубців
Звідси випливає, що Однак в конструкторській практиці приймається завжди менше значення передаточного відношення ( Рядові зубчасті механізми. Необхідність застосування складних механізмів, які складаються з кількох зубчастих пар, виникає частіше всього, коли передаточне відношення перевищує межі, встановлені для однієї пари зубчастих коліс. В цьому випадку використовують багатоступінчасті механізми. Їх основу складають послідовні ряди зубчастих коліс. Всі проміжні вали містять не по одному, а по два зубчастих колеса, які перебувають в зчепленні з колесами суміжних валів, у зв’язку з чим кожен з них є веденим по відношенню до попереднього вала і ведучим для наступного. Приклад такого механізму наведено на рис. 6.45. Нехай обертальний рух передається від вала 1 до вала 4. Позначивши через
Якщо вал 1 ведучий, то колеса з числом зубців Перемноживши останні рівності, одержимо
 . .
Рис. 6.45. Рядовий зубчастий механізм
Знак мінус показує, що останнє і перше колеса обертаються в протилежних напрямках. За означенням передаточного відношення маємо
 . .
Порівнюючи (6.19) і (6.20), одержимо
 . .
Таким чином, передаточне відношення рядового механізму дорівнює добутку передаточних відношень зубчастих передач. У формулі (6.21) Від формули (6.21) можна здійснити перехід до загальної формули для визначення передаточного відношення рядового механізму, який містить
 , ,
де Якщо на всіх валах механізму закріплено тільки по одному зубчастому колесу, причому колеса проміжних валів входять одночасно в зчеплення з колесами на попередньому і наступному валах, то такий механізм називається паразитним (рис. 6.46) Якщо вал 1 є ведучим, то на підставі (6.21), одержимо
або в загальному випадку
 , ,
де Останній вираз показує, що загальне передаточне відношення паразитного механізму не залежить від числа проміжних коліс і числа їх зубців.Такі колеса впливають тільки на напрямок обертання веденого вала. Паразитні механізми використовуються і для передачі обертального руху на значну відстань, оскільки така передача однією парою коліс приводить до нераціонального збільшення розмірів передачі. Рядові механізми, які призначені для зменшення числа обертів веденого вала в порівнянні з числом обертів ведучого, називаються редукторами. Якщо такі механізми збільшують число обертів веденого вала, їх називають мультиплікаторами. 6.3.2. Епіциклічні механізми. В розглянутих вище зубчастих механізмах осі коліс в процесі руху залишаються нерухомими. Кожне колесо здійснює простий обертальний рух.
На рис. 6.47 наведено схеми найпростіших чотириланкових епіциклічних механізмів із зовнішнім і внутрішнім зччепленням зубчастих коліс. В кожному з наведених прикладів колесо 2 обертається не тільки відносно осі Ланка 1, яка утворює обертальну кінематичну пару з стойкою f називається центральним або сонячним колесом. Ланка 3 називається водилом. Вона утворює кінематичні пари із стойкою f колесом 2. Це колесо називається сателітом
або планетним. Зубчасті колеса 1 і 2 в місці зчеплення утворюють вищу кінематичну пару. Рухомість епіциклічного механізму визначають за формулою Чебишева
Отже, для визначеності руху такого механізму відносно стойки необхідно двом його ланкам задати незалежні між собою рухи. Епіциклічний механізм двократної рухомості називається диференціальним або диференціалом. Якщо центральне колесо 1 закріпити, то диференціальний механізм перетворюється в свою різновидність – планетарний механізм однократної рухомості (рис. 6.48).
Рис. 6.48. Планетарні механізми
У випадку закріплення водила 3 диференціальний механізм перетворюється в звичайний рядовий зубчастий механізм з відносно нерухомими осями коліс. Кінематичний аналіз диференціального механізму, який передбачає визначення передаточного відношення, може бути проведений різними способами. Найбільш простим і поширеним є метод зупинки. Розглянемо диференціальний механізм, зображений на рис.6.49. Нехай ведучими ланками цього механізму будуть водило
Рис. 6.49. Диференціальний механізм
Надамо всьому механізму обертального руху навколо центральної осі з кутовою швидкістю
Передаточне відношення такого механізму визначається за формулою (6.18)
Вважаючи числа зубців
 . .
Рис. 6.50. Перетворення диференціального механізму в рядовий
Співвідношення (6.24) є універсальним оскільки дозволяє за заданим рухом двох ланок визначити рух третьої. Якщо в (6.24) покласти
або після певних перетворень
Якщо ведучою ланкою є водило, то
 . .
За формулою (6.25) знаходимо
В порівнянні з рядовими зубчастими механізмами диференціальні і планетарні механізми мають ряд суттєвих переваг. До них відносяться: 1. Можливість реалізації значних передаточних відношень при малій кількості ланок, в результаті чого зменшуються габарити і вага механізму. 2. Можливість надавати ведучій ланці такого обертального руху, який є сумою або різницею обертальних рухів ведучих ланок. Суттєвим недоліком епіциклічних механізмів є втрати енергії на тертя в кінематичних парах.
Поиск по сайту: |
 ,
, ,
, – радіуси зубчастих коліс;
– радіуси зубчастих коліс;  – числа зубців.
– числа зубців. .
.
 залежить від числа зубців
залежить від числа зубців  ,
,  .
.
 .
. .
. ) так як із збільшенням цього параметра збільшуються габарити передачі, її вага, а також труднощі виготовлення і монтажу.
) так як із збільшенням цього параметра збільшуються габарити передачі, її вага, а також труднощі виготовлення і монтажу. з відповідним індексом кутову швидкість обертання валів і число зубців коліс, запишемо для кожної пари зубчастих коліс передаточні відношення (з врахуванням напрямків обертання)
з відповідним індексом кутову швидкість обертання валів і число зубців коліс, запишемо для кожної пари зубчастих коліс передаточні відношення (з врахуванням напрямків обертання)

 .
. ведучі, а колеса з парними індексами числа зубців – ведені.
ведучі, а колеса з парними індексами числа зубців – ведені.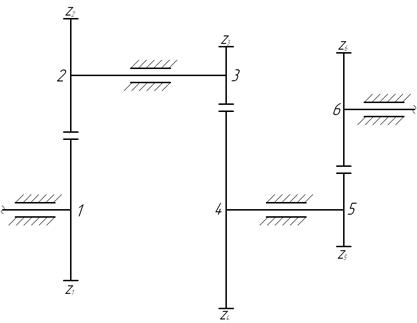
 розглядаються як алгебраїчні величини, знак яких сховано в їх позначеннях.
розглядаються як алгебраїчні величини, знак яких сховано в їх позначеннях. пар коліс зовнішнього і внутрішнього зачеплень
пар коліс зовнішнього і внутрішнього зачеплень – число зовнішніх зчеплень механізму.
– число зовнішніх зчеплень механізму.
 В сучасній практиці машинобудування широко застосовуються зубчасті механізми із складним обертальним рухом коліс. Група коліс або одне колесо такого механізму, який називається епіциклічним, обертаються не тільки відносно своєї геометричної осі, але разом з нею відносно деякої іншої нерухомої осі.
В сучасній практиці машинобудування широко застосовуються зубчасті механізми із складним обертальним рухом коліс. Група коліс або одне колесо такого механізму, який називається епіциклічним, обертаються не тільки відносно своєї геометричної осі, але разом з нею відносно деякої іншої нерухомої осі. , але разом з нею обертається навколо осі
, але разом з нею обертається навколо осі  . Точки ободу колеса 2 в процесі руху описують епіциклоїди (зовнішнє зчеплення) або гіпоциклоїди (внутрішнє зчеплення).
. Точки ободу колеса 2 в процесі руху описують епіциклоїди (зовнішнє зчеплення) або гіпоциклоїди (внутрішнє зчеплення).
 .
.

 і колесо 1, які одержують обертання від коліс 5, 6. Позначимо через
і колесо 1, які одержують обертання від коліс 5, 6. Позначимо через  кутові швидкості зубчастих коліс 1, 2, 3, 4 і водила.
кутові швидкості зубчастих коліс 1, 2, 3, 4 і водила.
 . В результаті цього водило
. В результаті цього водило 
 .
. механізму заданими, запишемо на підставі (6.22) останню формулу так
механізму заданими, запишемо на підставі (6.22) останню формулу так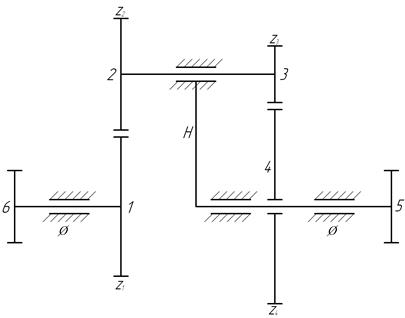
 або
або  , то одержимо залежність для визначення передаточного відношення планетарного механізму. Так при
, то одержимо залежність для визначення передаточного відношення планетарного механізму. Так при  ,
, .
. Приклад: Визначити передаточне відношення планетарного механізму зображеного на рис. 6.51, при закріпленому колесі 4, якщо ведучою ланкою є водило при
Приклад: Визначити передаточне відношення планетарного механізму зображеного на рис. 6.51, при закріпленому колесі 4, якщо ведучою ланкою є водило при  (механізм Давида).
(механізм Давида). .
. В даному механізмі за час, коли водило здійснить 10000 обертів, сонячне колесо 1 обернеться всього один раз. Від сонячного колеса до водила такий механізм не передає обертального руху через заклинювання. Крім того він має дуже низький коефіцієнт корисної дії, що дозволяє рекомендувати його для передачі обертального руху тільки в приладах.
В даному механізмі за час, коли водило здійснить 10000 обертів, сонячне колесо 1 обернеться всього один раз. Від сонячного колеса до водила такий механізм не передає обертального руху через заклинювання. Крім того він має дуже низький коефіцієнт корисної дії, що дозволяє рекомендувати його для передачі обертального руху тільки в приладах.