|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Применение различных систем управления для наведения управляемого оружия
Тактическое применение активного самонаведения в задаче класса воздух — воздух. Выше был описан принцип действия системы с активным самонаведением. Интересно изучить применение активного самонаведения в каждом из четырех основных классов управляемых снарядов. Рассмотрим сначала снаряды класса воздух — воздух. Снаряд запускается с самолета (перехватчика или бомбардировщика) по цели, которая может быть самолетом или другим снарядом. Ниже мы в качестве самолета-носителя будем рассматривать перехватчик. С того момента, как система управления снарядом захватила цель, она может решать задачу встречи самостоятельно. Таким образом, как только снаряд пущен, перехватчик вполне свободен и может оторваться от атакуемой цели. На рис. 8 показано одно из возможных применений активного самонаведения в задаче класса воздух — воздух. Перехватчик, выпустив снаряд, уходит из боя. До момента пуска снаряда должна быть проделана изложенная ниже цепочка действий. Теоретически обнаружение и захват цели могут быть выполнены несколькими различными способами: а) Радиолокатором снаряда. Активная система самонаведения может работать самостоятельно. Поэтому радиолокатор снаряда может автоматически осуществлять поиск и захват цели.
Рис. 8. Применение активного самонаведения в задаче класса воздух — воздух.
Информация о цели, получаемая этим радиолокатором, может быть передана на индикатор, находящийся у летчика; этот последний получает возможность проверить, что захвачена именно нужная цель. б) Оптической системой. Другой способ обнаружения и захвата цели в системе активного самонаведения состоит в том, что летчик обнаруживает сначала все цели визуально. Антенна бортового радиолокатора снаряда управляется от оптического прицела летчика или следит за ним. Строб в радиолокаторе снаряда автоматически осуществляет поиск цели вплоть до ее захвата. Летчик проверяет, что система действительно захватила именно намеченную цель. в) Радиолокатором перехватчика. Активная система самонаведения может быть использована вместе с некоторым радиолокатором, находящимся вне снаряда. Например, перехватчик может иметь радиолокатор большей мощности и с большим размером антенны, чем снаряд. Поэтому дальность действия радиолокатора, установленного на перехватчике, будет больше, чем у бортового радиолокатора снаряда. Визуальная система, только что описанная, имеет меньшую дальность действия, чем система, работающая вместе с радиолокатором перехватчика. Кроме того, визуальная система не выгодна в плохую погоду или в ночное время. Для дальнейшего рассмотрения применения активного самонаведения в задаче класса воздух-воздух мы предположим, что летчик перехватчика при обнаружении и сопровождении цели, а также при решении задачи встречи пользуется самолетной аппаратурой управления огнем. Тогда летчик будет вести самолет именно так, как необходимо для правильного пуска снаряда. Потребная точность вывода перехватчика на позицию, с которой можно пустить снаряд, зависит от ограничений, свойственных данному типу системы (максимальная допустимая скорость поворота снаряда, допустимая ошибка при старте, вызываемая ошибкой прицеливания и ожидаемым рассеиванием, пределы свободного поворота антенны бортового радиолокатора снаряда). Поэтому летчик должен сближаться с целью до того момента, когда бортовой радиолокатор снаряда захватит цель или будет иметься большая вероятность ее захвата. Тогда летчик пускает снаряд, после чего он может или выйти из боя, ил-и пустить следующий снаряд. Пропускная способность активной системы самонаведения ограничивается только количеством снарядов, имеющихся на перехватчике, и временем, потребным на подготовку пуска снаряда. Например, теоретически перехватчик имеет возможность выстрелить больше чем одним снарядом по одной и той же цели. Но он также имеет возможность выпустить один снаряд по одной цели, а затем уйти и выпустить второй снаряд по другой цели. Несомненно, что количество целей, которые могут быть атакованы, и количество снарядов, которые можно выпустить по одной и той же цели, зависят от времени, которое необходимо для обнаружения, захвата и решения задачи встречи радиолокационной установкой перехватчика, а также от времени, необходимого для обнаружения и захвата цели бортовым радиолокатором снаряда, и, наконец, от времени, необходимого на самый пуск снаряда. Все эти времена должны быть доведены до минимума. Число атак, которые может провести перехватчик, зависит от числа несомых им снарядов. Это количество определяется конструктивными параметрами снаряда, такими, как лобовое сопротивление, габарит и вес. Однако число снарядов, которое можно выпустить по одной и той же цели, ограничивается не только запасом снарядов на перехватчике, но и возможностью возникновения интерференционных явлений. Интерференционные явления могут появиться как вследствие взаимной интерференции между радиолокационными установками снарядов, так и вследствие интерференции между ними радиолокатором перехватчика. Эти явления можно ослабить, если заставить радиолокаторы снарядов работать на частотах, несколько отличающихся друг от друга. Однако число возможных атак, которые можно выполнить по одной или различным целям, определяется главным образом все-таки условиями, порождаемыми тактической обстановкой (скорость цели и перехватчика, высота, ракурс). Перехватчик должен иметь достаточную информацию о положении и намерениях цели, чтобы вступить в бой, прежде чем враг выполнит свое основное задание. Очевидно, что вследствие ограниченности места и полезной нагрузки на перехватчике снаряд должен быть невелик по габариту и весу. Вообще снаряд класса воздух — воздух, использующий активов самонаведение, имеет сравнительно малую дальность действия, оэтому конструктор должен тщательно рассмотреть ожидаемую актическую обстановку, чтобы определить зоны эффективных атак по заданной цели и предусмотреть средства, предохраняющие от выхода снаряда из "этих зон (подробности см. в одном из последующих томов этой серии). Снаряды на перехватчике могут быть размещены в подкрыльных кассетах или в фюзеляже (в бомбовом отсеке). Если снаряды подвешены снаружи, конструктор должен убедиться в том, что предусмотрены устройства для поддержания внутри снаряда нормальной рабочей температуры, не зависящей от внешних условий. Тактическое применение активного самонаведения в задаче класса воздух—поверхность. На рис. 9 представлено типичное применение снаряда класса воздух—поверхность с использованием активного самонаведения. В этом примере снаряд, пущенный с самолета-перехватчика, самонаводится активным образом на корабль. В реальных условиях цели могут быть весьма разнообразными по размерам: от такой большой, как целый город, до таких малых, как мост или плотина. Порядок выполнения атаки сходен с тем, который уже был рассмотрен в случае задачи класса воздух — воздух. Главная разница состоит в том, что теперь цели имеют значительно меньшие скорости. Вследствие этого вопрос о времени, необходимом для проведения операции, не будет стоять так остро. В большинстве случаев обнаружение цели будет входить в обязанности радиолокатора, установленного на самолете-носителе. Решение задачи встречи будет выполняться самолетной системой управления огнем; пользуясь этим решением, самолет сможет лететь по верной траектории, пока бортовой радиолокатор снаряда не захватит цель; после этого можно пускать снаряд. Пустив снаряд, самолет свободен в выборе: он может либо уйти и атаковать новую Цель, либо продолжать атаку той же самой цели. Возможность применения метода активного самонаведения для снаряда класса воздух — поверхность определяется свойствами ата-куемой цели и типом боевой части снаряда. Вообще, для того чтобы такая система была осуществимой, необходимо, чтобы цель имела некоторый признак, отличающий ее от окружающего фона и относящийся к ее размерам или движению. Активная система целесообразна для действий по одиночной цели, такой, как корабль /
Рис. 9. Применение активного самонаведения в задаче класса воздух — поверхность.
в море. Если снаряд имеет боевую часть с разрушающей силой, достаточной для поражения на больших площадях, то большой точности от системы не требуется. Возможно, что в случае снаряда класса воздух — поверхность более подходящими будут другие системы, описанные ниже в этой главе. Благодаря чрезвычайной трудности для снаряда удержать захваченную цель после пуска, вероятно, наиболее подходящей будет такая система, в которой летчик самолета-носителя сможет удерживать управление снарядом за собой и после пуска. Подобные системы рассматриваются ниже. Тактическое применение активного самонаведения в задаче класса поверхность — поверхность. На рис. 10 показан пример применения активного самонаведения в задаче класса поверхность—поверхность. На этом рисунке снаряд стартует с корабля и осуществляет активное самонаведение по другому кораблю. К этому случаю применимы вообще соображения, высказанные выше для задачи класса воздух — поверхность, потому что после старта снаряд как бы начинает относиться к классу воздух — поверхность. Хотя ограничения по габариту и весу в случае снаряда класса поверхность — поверхность уже не так строги, как в снарядахклассов воздух — воздух и воздух—поверхность, все же, применяя одно только активное самонаведение, он остается снарядом сравнительно малой дальности. Очевидно, что снаряд класса поверхность — поверхность, рассчитанный на большую дальность, должен использовать другие средства управления, различные для конечного этапа и для этапа сближения с целью, в процессе которого снаряд лишь подводится к цели на расстояние, допускающее использование системы управления конечного этапа. Если в качестве метода управления на конечном этапе используется активное самонаведение, цель, как уже было указано выше, должна иметь какой-то отличительный признак, выделяющий ее из окружающего фона, поскольку радиолокатор снаряда должен захватить цель. Очевидно, что дальность захвата цели бортовым радиолокатором снаряда должна быть тщательно согласована с точностью метода управления на этапе сближения. При этом бортовому радиолокатору может потребоваться работа в режимах поиска и сопровождения.
Рис. 10. Применение активного самонаведения в задаче класса поверхность — поверхность.
Для операций малой дальности бортовой радиолокатор снаряда, находящегося еще на стартовой установке, может быть направлен на цель с помощью радиолокатора управления огнем, который обнаруживает цель раньше. С момента захвата цели системой активного самонаведения снаряд становится совершенно автономным. Тактическое применение активного самонаведения к задаче класса поверхность — воздух. Пример такого применения показан на рис. 16.9. Снаряд может быть пущен с наземной установки или с корабля против самолета или другого снаряда. В этом случае перед стартом антенна бортового радиолокатора снаряда должна следить за антенной корабельного радиолокатора, сопровождающего цель. Когда цель будет захвачена бортовым радиолокатором снаряда, можно давать старт. Хотя для этого случая ограничения габарита и веса аппаратуры не столь строги, как для снарядов, запускаемых с самолета, использование активного самонаведения делает снаряд способным действовать лишь на сравнительно малых дальностях. Полуактивное самонаведение. На рис. 11 представлена блок-схема контура сопровождения для полуактивного самонаведения. В этом случае вне. снаряда находится некоторое устройство, подсвечивающее и сопровождающее цель, а также передающее наснаряд синхронизирующие сигналы. Мы предположим, что этим устройством является радиолокатор. Сопровождающий контур на снаряде состоит из головной антенны с приемником, принимающей
Рис. 11. Применение активного самонаведения в задаче класса поверхность — воздух.
энергию, отраженную от цели, и хвостовой антенны с приемником, принимающей энергию непосредственно от подсвечивающего радиолокатора. Хвостовая антенна и приемник используются для синхро- низации системы управления и подсвечивающего радиолокатора, чтобы определение дальности, ее производной и допплеровские измерения могли производиться непосредственно на снаряде. В системевырабатывается строб, при помощи которого селектируется только та цель, которая нужна. Цель может быть селектирована по дальности (импульсная система) или по скорости (доплеровская система). Способ селекции аналогичен тому, который уже был описан выше в системах активного самонаведения. Сравнение дальностей активного и полуактивного самонаведения. Выше было показано, что снаряды, использующие активное самонаведение, имеют сравнительно малую дальность действия. Ограничения по дальности получаются за счет размеров антенны, которые допустимы для головной части снаряда, и за счет максимальной мощности, которой можно располагать на снаряде с учетом имеющихся ограничений габарита и веса бортовой аппаратуры. Ограничения по максимальной дальности могут быть несколько смягчены, если радиолокационный передатчик удален со снаряда, что и делается в полуактивном самонаведении. Поскольку стартовая станция может нести значительно более тяжелое и громоздкое оборудование, чем снаряд, в этом случае можно увеличить и мощность передатчика и размеры передающей антенны.
Рис. 12. Применение полуактивного самонаведения в задаче класса воздух — воздух.
Система класса воздух—воздух, использующая полуактивное самонаведение. Такая система изображена на рис. 12. Снаряд запускается с перехватчика, который продолжает подсвечивать цель до момента ее накрытия снарядом. Целью может быть самолет или другой снаряд. При полуактивной системе управляющая информация получается при помощи энергии, отраженной от цели. Поэтому подсвечивающий радиолокатор (предполагается, что он работает в режиме сопровождения цели) должен быть все время направлен на цель. Очевидно, что система может работать только по одной цели, но с несколькими снарядами (в пределах грузоподъемности самолета-носителя). Преимущество этой системы перед описанными выше активными состоит в возможности получить большую дальность самонаведения, поскольку на перехватчике может быть установлен передатчик большей мощности и антенна больших размеров, чем на снаряде. Порядок действий при захвате цели и пуске снаряда остается тем же, что и при активной системе. Однако требования, предъявляемые системой управления к поведению перехватчика после пуска снаряда, становится теперь совершенно другими. В активной системе после пуска снаряда самолет-носитель совершенно свободен; он может уйти, или продолжать атаку той же цели, или атаковать другую цель. Этого уже нельзя сделать в случае полуактивной системы. Подсвечивающий радиолокатор должен быть направлен на цель непрерывно До момента ее накрытия снарядом и подавать синхронизирующий сигнал на снаряд через его хвостовую антенну. Это, естественно, накладывает некоторые ограничения на маневрирование перехватчика, зависящие от маневренной способности снаряда, ширины луча и так называемого «угла подсвечизания» (угол между траекторией полета перехватчика и линией визирования цели), а также от числа пущенных снарядов. Типы сближения перехватчика с целью во время атаки при полу, активной и активной системах могут быть существенно различными. Поскольку подсвечивающий радиолокатор после пуска снаряда должен быть непрерывно направлен на цель, допустимое для перехватчика маневрирование должно быть основательно изучено. Его маневрирование должно быть совместимо с работой всех элементов системы управления. Конечно, перехватчику желательно сохранить некоторую свободу маневрирования для того, чтобы он мог избежать защитного огня противника.
Рис. 13. Применение полуактивного самонаведения в задаче класса воздух — поверхность. Системы класса воздух — поверхность, использующие полуактивное самонаведение. Такая система изображена на рис. 13. Здесь снаряд стартует с самолета, который продолжает подсвечивать цель до накрытия ее снарядом. Характер и размер цели могут изменяться от отдельного моста до целого города. На рис. 13 целью является корабль. Относительно цели можно снова высказать соображения, уже приведенные выше для соответствующего примера активного самонаведения. Цель должна иметь некоторый признак, выделяющий ее из окружающего фона, чтобы были возможными селекция и сопровождение. Однако имеется и существенная разница между обеими системами, так как в случае полуактивпой системы летчик может непрерывно контролировать работу радиолокатора, чтобы убедиться, что он подсвечивает именно нужную цель. Так как вообще в рассматриваемом случае цели будут иметь сравнительно малую скорость, вопрос времени не будет стоять здесь столь остро, как в задаче класса воздух — воздух. Поэтому баланс времени не будет серьезно ограничивать пропускную способностьсистемы; однако в течение полета какого-нибудь снаряда система может работать только против одной цели. Возможны повторные атаки одной и той же.цели, так как преимущество в скорости ставит перехватчик в очень выгодное положение. Системы класса поверхность — воздух, использующие полуактивное самонаведение. Снаряд стартует с установки, расположенной на поверхности Земли, и самонаводится на цель, которую подсвечивает радиолокатор, установленный также на поверхности Земли. Стартовая установка может быть расположена как на суше, так и на корабле. Целью может быть самолет или другой снаряд. Этот случай показан на рис. 14.
Рис. 16.14. Применение полуактивного самонаведения в задаче класса поверхность — воздух.
Выше было показано, что система с полуактивным самонаведением представляет собой систему с относительно большой дальностью действия. Возможность получения от полуактивной системы преимущества в смысле увеличения дальности действия особенно резко выражена в случае задачи класса поверхность — воздух. Как на суше, так и на корабле можно иметь, очень мощные подсвечивающие радиолокационные установки с большими антеннами. Поэтому можно получить относительно большую дальность самонаведения при любом ракурсе цели.
Рис. 16.16. Контур сопровождения систем пассивного самонаведения. Так как в данном случае цель сама является источником энергии, используемой для управления, никакого передатчика не требуется. Эта энергия может быть энергией звуковых, световых, тепловых или радиоволн. Системы, использующие звук, рассматриваются ниже, в § 16.7. Так как вообще оборудование для системы самонаведения при помощи видимого или инфракрасного света в принципе одинаково, мы будем рассматривать обе системы как одну и ту же. Контур сопровождения состоит из устройства, собирающего энергию (так называемая следящая головка), приемника и привода, Сиг-нал ошибки вырабатывается из нестробированной модуляции и служит для того, чтобы привод все время держал следящую головку направленной на цель. Тепловое (наинфракрасны хлучах) пассивноесам о-нав еден и е. Пусть в системе, изображенной на рис. 16.16, в качестве приемника использовано некоторое устройство, чувствительное к тепловому излучению, например болометр или какое-нибудь другое устройство из рассмотренных в главе 5. Для сопровождения цели и получения переносчика информации можно применить сканирование, как было описано в главе 10. При этом основные принципы передачи информации остаются такими же, как в радиолокации, однако вследствие другого диапазона частот необходимо использовать и другие типы приборов. Самая существенная разница между применением инфракрасных и видимых частот, с одной стороны, и радиочастот — с другой, состоит в том, что в инфракрасной области нельзя применить гетеродинирование *) и получить связанную с ним чувствительность. При помощи соответствующих схем можно сравнить амплитуды инфракрасных сигналов, принятых в четырех квадрантах, и, таким образом, выработать управляющие сигналы в направлениях право — лево и вверх — вниз; эти сигналы могут быть использованы для управления следящей головкой. Так как для этого необходимо иметь на снаряде вертикаль, следящая головка должна быть стабилизирована. Пассивное самонаведениена радиочастотах. Одним из самых обычных устройств пассивного определения направлений является радиопеленгатор. Его можно применить и на управляемом снаряде. Необходимая информация может быть получена при помощи фазометрических устройств, если форма энергии, излучаемой целью, допускает их использование. Например, если на цели работает импульсный радиолокатор, применение фазометрических устройств возможно. Другой способ состоит в том, чтобы использовать сравнение амплитуд принимаемого от цели сигнала за один период сканирования. Применение таких приемов возможно только при том условии, что нам известна полоса частот, на которой работает цель. Кроме того, необходимо предусматривать настройку приемника снаряда на частоту цели. Тактическое применениепассивного самонаведения. Один из примеров использования пассивного самонаведения показан на рис. 16.17. В этом случае снаряд принадлежит к классу воздух — воздух. До пуска снаряда необходимо снова выполнить все те действия, которые были описаны выше для систем классавоздух — воздух. Обнаружение цели может происходить при помощи какой-нибудь установки на перехватчике или при помощи бортовой аппаратуры самого снаряда. После обнаружения цели перехватчик должен занять правильную исходную позицию для пуска снаряда. Поскольку пассивная система не требует излучения перехватчиком какого-нибудь вида энергии, сразу же после пуска снаряда перехватчик оказывается свободен и может уйти. На рис. 16.17 показано только одно из возможных применений пассивного самонаведения, однако оно может быть использовано и в остальных трех классах управляемых снарядов. Главное преиму-
Рис. 16.17. Применение пассивного самонаведения в задаче класса воздух — воздух. щество пассивной системы состоит в простоте бортовой управляющей аппаратуры. На снаряде не нужен передатчик. Все следящее оборудование на снаряде может быть сделано очень компактным. Второе преимущество состоит в том, что после захвата цели пассивная система становится совершенно автономной. Для использования пассивной системы необходимо, чтобы цель излучала энергию, пригодную для выработки управляющей информации, и чтобы имелись достаточные сведения .о действительных излучениях цели. Например, применение пассивного самонаведения на радиочастотах основано на предположении, что противник будет излучать такую энергию в необходимое для нас время. Очевидно, что если цель замолчит на время атаки, эта форма пассивного самонаведения не сможет быть использована. Применение пассивного самонаведения на видимых или инфракрасных лучах предполагает наличие у цели некоторого признака, выделяющего ее из окружающего фона. Метеорологические условия, тип и ракурс цели, свойства фона — вот причины, от которых зависит удачное или неудачное использование системы. Радиус действия обеих указанных систем может чрезвычайно сильно уменьшаться в случае тумана или дымки. Если цель не излучает света или тепла, достаточно отличающегося от излучения фона, пассивнаясистема неприменима. Все изложенные соображения одинаково относятся ко всем типам систем управления, использующим пассивное самонаведение. Конечно, кроме того, каждый тип имеет свои индивидуальные особенности. 16.3. Системы управления при помощи команд Система управления при помощи команд состоит в том, что управляющая информация передается на снаряд из внешнего источника, вследствие чего снаряд движется по предписанной ему траектории. Вообще эта система требует наблюдения за движением снаряда извне (а если цель движется, то и за ней также), чтобы каждое отклонение снаряда от предписанного сближения было ему сообщено и преобразовано его бортовой аппаратурой в такие действия, которые исправят траекторию и обеспечат накрытие цели. Система управления при помощи команд возможна во многих вариантах, простых и сложных. Однако она может оказаться самой простой из всех рассмотренных выше систем управления. Поэтому система управления при помощи команд была вообще первой из систем управления, примененных для дистанционного управления на поверхности Земли такими объектами, как лодки, танки и автомобили, а в воздухе — для управления самолетами-снарядами и планирующими бомбами. Управление с помощью команд является наиболее широко распространенным и применяется не только для управления снарядами, но и многими другими механизмами. Ее самый главный недостаток с точки зрения управления снарядами — малая пропускная способность. В каждый момент времени такая система управления может решать только одну задачу; это значит, что в течение определенного интервала времени система может наводить только один снаряд и только по одной цели. Интервал времени, в течение которого система занята, играет весьма важную роль при рассмотрении этого метода управления. Системы управления при помощи команд разделяются на две большие группы: первая, называемая системой с сопровождающими радиолокаторами, в которой информация о движении цели и снаряда получается при помощи сопровождающих радиолокаторов, и вторая, называемая системой с оптическим сопровождением, где то же самое выполняется при помощи оптики. На рис. 16.18 изображен принцип устройства системы с сопровождающими радиолокаторами. Система, изображенная на рис. 16.18, предусматривает сопровождение снаряда и цели при помощи отдельных радиолокаторов. По результатам сопровождения вычисляется отклонение снаряда от предписанной ему траектории, и эти ошибки передаются на снаряд при помощи специальной передающей станции. Величина и направление, переданной ошибки используются бортовой управляющей
Ориентация ракеты. ПОНЯТИЕ ОБ УПРАВЛЕНИИ СНАРЯДАМИ
1. Траектории управляемых снарядов
Траектория ракеты — это линия, которую в пространстве описывает ее центр тяжести. Управляемый снаряд — это беспилотный летательный аппарат, обладающий средствами управления, с помощью которых можно влиять на движение аппарата на всей траектории пли на одном из участков полета. Управление снарядом на траектории потребовалось для того, чтобы поразить цель, оставаясь на безопасном от нее расстоянии. Существуют два главных класса целей: подвижные и неподвижные. В свою очередь реактивный снаряд может запускаться с неподвижного стартового устройства или с подвижного (например, с самолета). При неподвижных целях и стартовых устройствах данные, необходимые для поражения цели, получаются из известного относительного расположения места старта и цели. При этом траектория движения реактивного снаряда может быть заранее рассчитана, а снаряд снабжен устройствами, обеспечивающими его движение по определенной рассчитанной программе. В других случаях относительное расположение места старта п цели непрерывно меняется. Для поражения цели в этих случаях необходимо иметь устройства, следящие за целью и непрерывно определяющие взаимное положение снаряда и цели. Сведения, получаемые от этих устройств, используются для управления движением снаряда. Управление должно обеспечивать движение ракеты к цели по наивыгоднейшей траектории. Для того чтобы полностью охарактеризовать полег ракеты, недостаточно знать только такие элементы ее движения, как траектория, дальность, высота, скорость полета и другие величины, характеризующие движение центра тяжести ракеты. Ракета может занимать в пространстве различные положения относительно своего центра тяжести. Ракета представляет собой тело значительных размеров, состоящее из множества узлов и деталей, изготовленных с известной степенью точности. В процессе движения она испытывает различные возмущения, связанные с неспокойным состоянием атмосферы, неточностью работы силовой установки, различного рода помехами и т. п. Совокупность этих погрешностей, не предусмотренных расчетом, приводит к тому, что фактическое движение сильно отличается от идеального. Поэтому для эффективного управления ракетой необходимо устранить нежелательное влияние случайных возмущающих воздействий, или, как говорят, обеспечить устойчивость движения ракеты.
2. Возмущения, действующие на ракету в полете
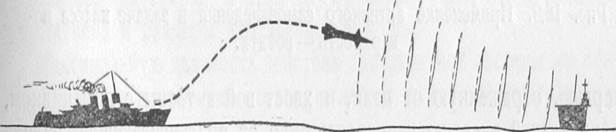
Рассмотрим прямолинейное движение неуправляемой ракеты под действием только силы тяги (весом ракеты пренебрегаем). Пусть старт ракеты находится в точке А, а цель —в точке Б (рис. 10). Идеальная траектория движения ракеты должна быть прямой линией А Б. Предположим также, что направление силы тяги /? двигателя, приложенной к центру тяжести ракеты ЦТ, совпадает с осью
Рис. 10. Траектория идеальной ракеты при действии только силы тяги
ракеты, а ракета представляет собой симметричное тело. При полете ракеты в воздухе на нее действуют аэродинамические силы, оказывающие сопротивление движению. В нашем случае эти силы вызваны появившейся разностью давления воздуха спереди и сзади ракеты, а также трением ракеты о воздух. Вследствие симметрии ракеты направление действия силы сопротивления воздуха X, приложенной в центре аэродинамического давления ЦД, будет совпадать с осью ракеты. Такая сила будет уравновешиваться силой тяги, совпадающей с осью ракеты, и не исказит прямолинейность полета. Иная картина будет, если ракета имеет несимметричную конструкцию, вызванную неточностью изготовления и деформациями отдельных частей ракеты во время работы двигателя (рис. 11). В этом случае при движении ракеты в воздухе, кроме силы сопротивления X, на нее будет действовать аэродинамическая сила У, уводящая ракету с прямолинейной траектории. Эта сила появляется при
Рис. 11. Аэродинамические силы, действующие на несимметричную ракету
обтекании воздухом несимметричных тел, даже если продольная ось тела направлена параллельно набегающему потоку. Появление аэродинамической силы У вызвано тем, что различные части поверхности несимметричного тела обтекаются струйками воздуха, имеющими различные скорости. Струйки воздуха, обтекающие более выпуклую поверхность (верхнюю), имеют скорость большую, чем струйки, обтекающие менее выпуклую поверхность (нижнюю). Из курса физики известно, что в том сечении
Рис. 12. Эксцентриситет реактивной силы струйки, где скорость больше, давление меньше. Так как скорость воздуха в верхней части ракеты оказалась больше, чем в нижней, то давление в нижней части ракеты больше, чем в верхней, и па ракету действует сила У. Однако наибольшее отклонение ракеты от заданной траектории вызывает эксцентриситет реактивной силы, т. е. угловое отклонение е направления действия реактивной силы от оси симметрии ракеты (рис. 12). На это указывал еще создатель совершенных русских боевых ракет К. И. Константинов. Эксцентриситет реактивной силы возникает из-за неточного изготовления и неправильной установки двигателя ракеты. Реактивная сила по своей величине превосходит возникающие при полете аэродинамические силы. Вследствие большой длины активного участка полета ракеты (т. е. полета с работающим двигателем) даже небольшой эксцентриситет может увести ракету на значительное расстояние от цели.
3. Понятие об устойчивости ракеты
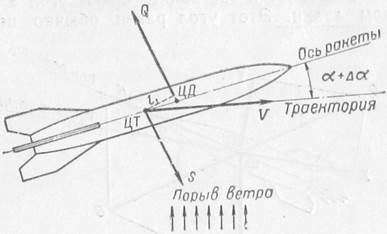
Устойчивость любого тела связана с формой его равновесия. Из механики известно, что существуют три формы равновесия тела: неустойчивое, безразличное и устойчивое. Рассмотрим равновесие крылатой неуправляемой ракеты при движении ее в воздухе. Равновесием ракеты называется такое состояние, при котором ее центр тяжести"движется прямолинейно и равномерно и ракета не вращается вокруг своих осей. Для равномерного и прямо" линейного движения центра тяжести ракеты необходимо, чтобы все силы, действующие на ракету, уравновешивались. Чтобы ракета не вращалась относительно центра тяжести, необходимо, чтобы уравновешивались приложенные к ней вращающие моменты. Такая ракета изображена на рис. 14. На этом рисунке буквой R обозначена сила тяги ракетного двигателя, а буквой F — сила веса ракеты. Эти силы прилоложены к центру тяжести ракеты ЦТ. Сумма этих сил находится по известному правилу параллелограмма и обозначена на рисунке буквой S. Ось ракеты с направлением скорости ракеты V, вообще говоря, не совпадает и составляет с ним угол a, называемый углом атаки. Этот угол равен обычно нескольким
Рис. 14. Равновесие ракеты
градусам. Вследствие наличия угла атаки обтекание ракеты встречным потоком воздуха становится несимметричным. На нее действует аэродинамическая сила приложенная в центре давления ТД. В_равновесном состоянии ракеты силы S и Q равны и направлены в противоположные стороны, центр аэродинамического давления совпадает с центром тяжести ракеты. Положение центра давления и величина полной аэродинамической силы существенно зависят от угла атаки a. Обычно величина аэродинамической силы растет при увеличении угла атаки и уменьшается при его уменьшении. Рассмотрим поведение ракеты, у которой центр давления при изменении угла атаки на какую-то величину Da оказывается впереди центра тяжести ракеты (рис. 15). В этом случае ракета будет иметь неустойчивую форму равновесия. Если под действием случайных возмущений, действующих на ракету угол атаки ракеты увеличится, то он будет увеличиваться и дальше, так как возрастающая аэродинамическая сила Q, как видно из рис. 15, способствует его увеличению. Эта сила приложена на расстоянии l1 от центра тяжести ракеты и создает момент, поворачивающий ракету относительно ее центра тяжести. При случайном уменьшении угла атаки такая ракета будет продолжать самостоятельно уменьшать его из-за резкого падения величины аэродинамической силы.
Рис. 15. Неустойчивей равновесие ракеты
Рис. 16. Устойчивое равновесие ракеты
Если при изменении угла атаки центр давления оказывается сзади центра тяжести ракеты, то ракета имеет устойчивую форму равновесия. В этом случае момент, образуемый полной аэродинамической силой, действующей на плече l2 (рис. 16), стремится восстановить прежний угол атаки. Этот момент называется аэродинамическим стабилизирующим моментом. Величина его возрастает, если сместить центр давления на большее расстояние от центра тяжести. Для смещения центра давления назад к ракете в древние времена приделывали хвост, а позднее — хвостовое оперение (стабилизатор). Но так как основной причиной увода ракеты от нужного направления является эксцентриситет реактивной силы, эти мероприятия не могли эффективно улучшить стабилизацию ракеты. К тому же аэродинамические силы нельзя использовать для стабилизации ракеты, летящей в безвоздушном пространстве или в верхних слоях атмосферы, где воздух чрезвычайно разрежен. Между тем точность попадания в цель беспилотного летательного аппарата в основном зависит от успешного решения задачи устойчивости. Поэтому одной из главных задач устройств системы управления, расположенных на борту ракеты, является задача обеспечения устойчивости движения ракеты.
4. Координаты, определяющие положение ракеты в пространстве
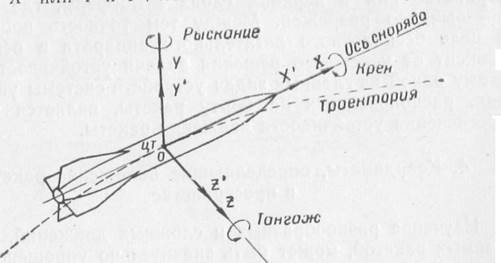
Изучение разнообразных и сложных движений, совершаемых ракетой, может быть значительно упрощено, если движение ракеты представить как сумму поступательного движения ее центра тяжести и вращательного движения относительно центра тяжести. Примеры, приведенные выше, наглядно показывают, что для обеспечения устойчивости движения ракеты чрезвычайно важно иметь ее устойчивость относительно центра тяжести, т. е. угловую стабилизацию ракеты. Вращение ракеты относительно центра тяжести можно представить как сумму вращательных движений относительно трех перпендикулярных осей, имеющих определенную ориентацию в пространстве. На рис. 17 изображена идеальная оперенная ракета, летящая по рассчитанной траектории. Начало системы координат, относительно которой мы будем стабилизировать ракету, поместим в центр тяжести ракеты. Ось А' направим по касательной к траектории в сторону движения ракеты. Ось У проведем в плоскости траектории перпендикулярно к оси X, а ось 7. — перпендикулярно к первым двум осям, как показано на рисунке. С ракетой свяжем прямоугольную систему координат Х'У'Z.', аналогичную первой, причем ось X' должна совпадать с осью симметрии ракеты. В идеально стабилизированной ракете оси X', У, 2.' совпадают с осями X, У, Z, что и показано на рис. 17. Под действием возмущений ракета может поворачиваться вокруг каждой из ориентированных осей X, У, Z Поворот ракеты вокруг оси X называют креном ракеты. Угол крена т лежит в плоскости У0Z. Его можно определить, измерив в этой плоскости угол между осями Z и Z´ или Y и Y´. Поворот вокруг оси Y – рыскаие ракеты. Угол рыскаия ψ находится в плоскости XOZ как угол между осями X и X´ или Y и Y´ , лежащими в плоскости траектории.
Рис. 17. Ракета со связанными с ней системами координат
Рис. 18. Земная система координат
Автоматические устройства стабилизации ракеты должны придавать ей такое положение, когда φ = 0 или φ=α, ψ=0, γ=0. Для этого на ракете должны находиться чувствительные элементы, измеряющие эти углы, а также устройства, способные изменить ее угловое положение. Траектория ракеты в пространстве определяется текущими координатами Хо, У0, Z0 ее центра тяжести. За начало отсчета берут точку старта ракеты. Для ракет дальнего действия за ось Х0 принимают прямую, касательную к дуге большого круга, соединяющего старт с целью. Ось У0 направляют при этом вверх, а ось Z0 — перпендикулярно к двум первым осям. Эта система координат называется земной (рис. 18). Расчетная траектория баллистических ракет лежит в плоскости А'0ОУ0, называемой плоскостью стрельбы, и определяется двумя координатами Х0 и У0. С различными типами траекторий управляемых снарядов мы познакомимся ниже.
5. Управляющие усилия
Для изменения углового положения беспилотного летательного аппарата к нему должны быть приложены некоторые управляющие усилия. Эти усилия придают летательному аппарату определенный характер движения, обеспечивающий нужное положение в пространстве и направление скорости полета. Применяемые органы управления существенно зависят от типа летательного аппарата. Так в беспилотном летательном аппарате, имеющем обыкновенную (самолетную) аэродинамическую схему (рис. 19), управляющие усилия могут создаваться с помощью руля высоты, руля направления и элеронов, как и в обычном самолете. Ввиду того что принципы действия рулей и элеронов аналогичны, рассмотрим для примера работу руля высоты. При отклонении руля высоты изменяются угол атаки и кривизна профиля всего горизонтального оперения (рис. 20). Это вызывает изменение характера обтекания не только руля, но и неподвижной части горизонтального оперения — стабилизатора.
В результате изменяется картина распределения давления по профилю оперения, а следовательно, и величина подъемной силы горизонтального оперения. Таким образом, в создании новой подъемной силы оперения участвуют и стабилизатор, и руль высоты. Но, так как площадь стабилизатора больше площади руля, изменение подъемной силы происходит в основном за счет стабилизатора. Подъемная сила, вызываемая отклонением рулевых поверхностей, создает управляющий момент, поворачивающий летательный аппарат вокруг его центра тяжести. Если
Рис. 20. Управляющая сила воздушного руля
мы отклоним рулевую поверхность в другую сторону, то изменим направление подъемной силы на противоположное, а следовательно, и знак управляющего момента. Величина управляющего момента зависит от угла отклонения руля. С помощью руля высоты получают аэродинамические моменты, управляющие тангажом летательного аппарата. Руль направления служит для управления
Рис. 21. Управление креном ракеты с помощью элеронов
углом рыскания. Для получения моментов, управляющих креном аппарата, необходимо отклонять элероны в разные стороны (рис. 21). Подъемную силу горизонтального и вертикального оперения крылатой ракеты можно менять не только' с помощью отклонения рулевых поверхностей, но и с помощью интерцепторов. Интерцепторы — это тонкие металлические пластинки, выступающие на 2—3 мм над плоскостью оперения. Характер обтекания оперения набегающим воздушным потоком меняется при наличии такой пластинки. На той стороне оперения, где выдвинут нитерцептор, воздушный поток затормаживается, а его давление увеличивается. В результате появляется управляющая сила. Для получения маленькой управляющей силы интерцепторы выдвигаются с какой-то частотой (порядка нескольких герц) на небольшие промежутки времени. С увеличением времени пребывания интерцепторов в выдвинутом положении управляющая сила увеличивается и достигает наибольшей величины при их выдвижении на длительный промежуток времени. Полет летательного аппарата, выполненного по самолетной схеме, определяется в основном наличием подъемной силы крыла. Однако с ростом скорости полета усиливаются и выявляются более отчетливо баллистические свойства летательного аппарата, т. е. свойства, основанные на использовании его кинетической энергии. При достаточно большой скорости полет летательного аппарата определяется в основном его баллистическими свойствами. Поэтому с увеличением скорости полета отпадает необходимость снабжать ракету большими и тяжелыми крыльями, создающими подъемную силу. Размеры оперения ракет с ростом их скоростей уменьшаются. Причем для получения большой управляющей силы оперение ракеты делается целиком поворотным.
Рис. 22. Аэродинамические схемы ракет с декартовым расположением управляющих поверхностей
У скоростных ракет применяют обычно уже не самолетное, а «декартово» расположение оперения, в котором конструкция и работа горизонтального и вертикального оперения одинаковы. В настоящее время распространены схема ракет с подвижными управляющими крыльями и неподвижным хвостовым оперением, схема «утка», в которой рулевые поверхности располагаются впереди центра тяжести ракеты, и схема с неподвижными крыльями и отклоняемым хвостовым оперением (рис. 22). Самолетная аэродинамическая схема отличается от четырехкрылой тем, что в ней обычно используется координированный разворот: при изменении направления полета необходимое помощью элеронов определенным образом накренить ракету. Это усложняет ее систему стабилизации. В ракетах с декартовым расположением оперения простым отклонением рулевых поверхностей производится разворот в любом направлении. Полет баллистических ракет происходит в основном за пределами плотных слоев атмосферы. Они не требуют для своего полета опоры в воздухе, поэтому у них нет крыльев. Атмосфера только препятствует их движению, вызывая потерю кинетической энергии. Управляющие моменты в баллистических ракетах создаются только реактивными силами. Для стабилизации необходимо уметь поворачивать баллистическую ракету вокруг ее центра тяжести. Очень часто для таких поворотов используют небольшие реактивные двигатели. Эти двигатели, называемые часто верньерными или струйными, могут питаться от баллонов со сжатым воздухом или от парогазогенераторной установки. Две пары таких двигателей, неподвижно скрепленных с ракетой (рис. 23,а), могут создавать моменты, устанавливающие продольную ось ракеты в нужном направлении. Для ликвидации вращения вокруг продольной оси необходимо верньерные двигатели сделать поворотными и отклонять двигатели каждой пары в противоположные стороны, создавая крутящий момент (рис. 23,6). В больших ракетах в качестве верньерных двигателей часто используют дополнительные поворачивающиеся сопла основного двигателя. Кроме стабилизации ракеты, такие двигатели точно корректируют скорость ракеты. Для управления положением продольной оси ракеты применяется также поворот на небольшой угол камеры сгорания ракеты (рис. 23, в). В этом случае силу тяги Р двигателя можно разложить на две составляющие, используя известный метод параллелограмма сил. Составляющая тяги по оси ракеты (действующая сила тяги) равна Р.соз|3. Составляющая, направленная перпендикулярно оси ракеты (управляющая сила), равна Рз'тф. Камера имеет гибкие сочленения с топливными баками. Поворотом ее в нужную сторону и отклонением на определенный угол можно получить необходимый управляющий момент. Очевидно, что такой же эффект можно получить, отклоняя не всю камеру сгорания, а лишь сопло реактивного двигателя (рис. 23,г).
Рис. 23. Методы получения управляющих усилий: а — неподвижные верньерные двигатели Д1 — Д4 (С — сопло основного двигателя); б — поворотные верньерные двигатели 1 — сопло основного двигателя; стрелки показывают направления возможных отклонений оси верньерного двигателя); в — поворот камеры сгорания основного двигателя; г— шарнирное соединение сопла с камерой сгорания (2 — скользящая поверхность); О — дефлектор из двух шарнирно закрепленных колец (3 — привод для перемещения Дефлекторов: 4 — точки шарнирного поворота); е — изменение тяги двигателей, входящих в связку
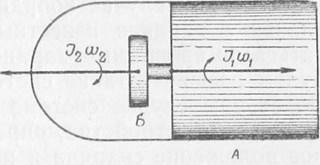
Несмотря на техническую сложность создания поворотного сопла, такой метод управления все же применяется в ракетах с двигателями твердого топлива. Ракетный двигатель твердого топлива является по существу огромной камерой сгорания, заполненной топливом. Гораздо легче поворачивать сопло, чем такую камеру. При повороте сопла или камеры для стабилизации ракеты по крену необходимо устанавливать верньерные двигатели. Тугоплавкие (графитовые) газовые рули используются в настоящее время в ракетах, двигатель которых работает непродолжительное время. Это вызвано как быстрым износом таких рулей, находящихся в струе раскаленных газов, обладающих огромной скоростью, так и значительной потерей на них тяги двигателя. Для немецкой ракеты Фау-2 потеря тяги составляла 160 кг па каждый газовый руль и возрастала по мере их поворота. На ракетах твердого топлива применяют дефлекторы, отражатели реактивной струи. На рис. 23, с? изображен дефлектор, состоящий из двух шарнирно закрепленных колец из тугоплавкого материала. Дефлекторы устанавливаются на срезе сопла. С помощью четырех тяг кольца можно повернуть в любую сторону и создать тем самым необходимый управляющий момент. На ракете может быть установлена связка из нескольких двигателей (рис. 23,е). В этом случае имеется возможность получать управляющий момент путем изменения силы тяги того или иного двигателя, так как линия действия отдельного двигателя не проходит через центр тяжести ракеты. Если полет ракеты происходит вне атмосферы под действием только силы тяжести (например, полет искусственного спутника Земли), то управлять положением ракеты можно или с помощью струйных двигателей, или с помощью маховых масс. Применять маховые массы для управления положением свободного тела (межпланетной станции) предложил К. Э. Циолковский.
Рис. 24. Свободным телом управляют вращающиеся маховики
Принцип использования маховых масс основан на законе механики о сохранении момента количества движения системы тел постоянным, если на систему не действуют внешние силы. Моментом количества движения тела называется произведение его момента инерции на угловую абсолютную скорость (т. е. скорость, отсчитываемую относительно неподвижного «мирового пространства»). Представим в свободном пространстве систему из двух тел: межпланетной станции А и маховой массы Б (рис. 24). Обозначим буквой I1 момент инерции относительно оси вращения тела А, а буквой I2 — момент инерции относительно оси вращения тела Б. Угловые скорости этих тел обозначим соответственно буквами ω1 и ω2. Если оба тела не вращаются, то момент количества движения системы этих тел равен нулю, т. е.
Если мы каким-либо способом начнем вращать маховую массу с постоянной скоростью ω2. то межпланетная станция начнет вращаться в противоположную сторону со скоростью
Нетрудно убедиться, что момент количества движения системы при этом остается равным нулю, т. е.
После того как межпланетная станция повернется на необходимый угол, мы можем остановить маховую массу, и межпланетная станция остановится тоже. Если вначале межпланетная станция вращалась и обладала каким-то моментом количества движения
то его можно скомпенсировать (остановить станцию), заставив маховик вращаться в ту же сторону, что и межпланетная станция, со скоростью
Для поворота станции в этом случае необходимо на некоторое время уменьшить или увеличить скорость вращения маховика.
2. Сравнительная оценка радиолокационных и оптико-электронных систем. 2.1. Краткая характеристика методов и систем локации и навигации. Это методы и системы, предназначенные для определения местоположения и параметров движения объектов с помощью электромагнитного излучения (диапазона). Локацией называется отрасль техники, охватывающая радиотехнические методы и средства обнаружения, определения координат и параметров движения объектов (целей) с помощью отражения (рассеяния или излучения) ими радиоволн различных диапазонов. Навигации – наука (область техники), рассматривающая способы вождения кораблей и самолетов с помощью радио и оптико-электронных средств. Радиолокационные методы разделяются на: - активную радиолокацию. Сигнал, принимаемый РЛС, создается в результате отражения целью сигнала посланного системой РЛС. Такой сигнал называется прямым или зондирующим, принимаемый сигнал – отраженным. Активную систему отличает наличие передатчика в РЛС и использование отражательного сигнала. - активная локация с активным ответом. Используется сигнал ретранслируемым ответчиком, расположенным на объекте. Как правило, ответный сигнал имеет большую мощность, чем отражательный (определение «свой» «чужой»). - пассивная радиолокация. Использует обнаружение искусственных радиосигналов и естественные излучения.
Физические основы радиолокации. Информации об объекте локации несет отраженный сигнал. Зондирующий сигнал используется в качестве опорного сигнала. В РЛ используется свойство электромагнитных волн распространяться в однородной среде прямолинейно с постоянной скоростью Дальность до объекта локации можно оценить по времени задержки между зондирующим и отражательным сигналом
От вида и параметров зондирующего сигнала зависят основные характеристики РЛС: - дальность действия, - точность определения координат (скорости) разрешающей способности. Информацию о скорости объект может получить по изменениям частоты отражательного сигнала относительно зондирующего
тогда радиальная скорость объекта
Амплитуда отраженного сигнала несет информацию о размерах объекта и свойствах его поверхности. Характер изменения амплитуды сигнала также несет информацию о свойствах объекта. Степень поляризации отраженного сигнала несет информацию о форме и отражательных свойствах объекта.
Основные методы определения положения в радиолокации и радионавигации. Для определения положения объекта в пространстве необходимо определить 3 его координаты. В навигации для характеристик положения объекта используют понятия о поверхностях положения и линиях положения. Под поверхностью положения понимается геометрическое место точек, имеющих постоянную координату (если сохраняется дальность Д, то поверхность положения – сфера с радиусом Д). Пересечение двух поверхностей полей дает линию положения (для определения линии положения необходимы две координаты). Точка определяется пересечением трех поверхностей положения или линии полой и поверхности положения. Радиотехническим методом могут быть измерены: - дальность до цели (опорного пункта); - разность дальностей до двух опорных пунктов Д1-Д2; - угловые координаты в вертикальной плоскости; - угловые координаты в горизонтальной плоскости. В соответствии с видом измеряемых координат различают четыре основных метода определения положения объекта: -. угломерный; - дальномерный; - разностно-дальномерный; - комбинированный (угло-дальномерный) Угломерный метод определения положения объекта. Используются направленные свойства системы при приеме и передаче сигнала. а) Направленный приемник (радиопеленгатор) – ненаправленный радиомаяк
приемная станция с направленной антенной
Направление на маяк определяется пеленгом – β. Если пеленг отсчитывается от географического меридиана (направление юг → север), то он называется истинным пеленгом или азимутом. Азимутом называется также угол, отсчитанный в горизонтальной плоскости от любого направления, принятого за «0». Определение направления производят в точке расположения РП.
Диаграмма маяка вращается, отмечая «0» параметры в направлении Север-Юг. При максимальном сигнале на приемнике отсчитывается обратный пеленг
РИС. 27.
Радиопеленгатор и маяк позволяют определить направления на объект (линию положения). Для определения положения местоположения пеленгатора необходим второй маяк.
РИС. 28 Определяя два пеленга на плоскости, можно найти местоположение РП, как точку пересечения двух линий положения (для определения положения РП в пространстве, необходим третий маяк). Дальномерный метод определения положения. Измерение дальности осуществляется по схеме «запрос» - «ответ» или по схеме локации. При этом дальность до цели определяется соотношением :
Определяется поверхность положения (иногда дальномерный способ называется круговым). Линия положения определяется по двум базовым сигналам О1, О2 – ответы или объекты с известными координатами, например отражатель.
РИС.29 Разностно-дальномерный метод. Используется приемоиндикатор на борту объекта, определяется разность времен прихода сигналов от двух опорных маяков А и В: А – ведущая , В – ведомая. По сигналам станции А осуществляется синхронизация(определяется РИС. РИС. 30 Для определения дальности (положения) нужны две пары станций, однако обычно используют одну ведущую А и две ведомых В1, В2. Разностно-дальномерный метод более точный, чем угломерный.
Комбинированный угломерно-дальномерный метод. РИС. 31
β – азимут (если отчет ведется от географического меридиана); φ – угол места – угол между направлением на объект и горизонтом; Д - наклонная дальность; Д2 – горизонтальная дальность; h – высота. РИС.
Если от произвольного направления, то β – пеленг.
Поиск по сайту: |




















 , (21)
, (21) (22)
(22) (23)
(23) ,
, . (24)
. (24) .
. .
. ,
, .
.

 На рисунке - передающая станция (ненаправленный радиомаяк)
На рисунке - передающая станция (ненаправленный радиомаяк)
 б) Ненаправленный приемник, радиомаяк с направленной антенной.
б) Ненаправленный приемник, радиомаяк с направленной антенной. .
.



 На рисунке - не направленная приемная станция, - направленная передающая станция, - передача сообщения об угле поворота передатчика.
На рисунке - не направленная приемная станция, - направленная передающая станция, - передача сообщения об угле поворота передатчика.


 ).
).

 ;
;  .
. ,
, 