|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Анализаторы поля зрения
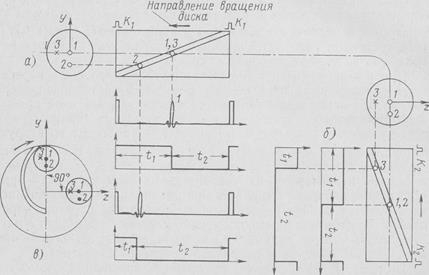
Анализатор является одним из основных элементов любого теплопеленгационного прибора. Он выполняет три задачи: — последовательно просматривает поле зрения прибора в фокальной плоскости; — анализирует попадающие в поле зрения теплоизлучающие предметы и фильтрует их от фонов (земли, облаков); — модулирует тепловой поток. Анализатор представляет собой плоский тонкий диск в виде круга или квадрата. Иногда анализатор выполняют в форме цилиндра, части сферы или конуса. Материалом диска может служить металл, пластмасса или стекло. Если материал диска не прозрачен для инфракрасного излучения, то в нем делают вырезы специальной формы (рис. 9.2, а, е) на прозрачном для инфракрасных лучей материале наносят полосы, не пропускающие тепловое излучение (см. рис. 9.2, б, в, г, д). Чередование прозрачных и непрозрачных полос (участков) диска называется растром. Форма растра может быть самой разнообразной. Наиболее часто применяют спиральные, радиальные, концентрические, в виде шахматной доски и смешанные. Периодически перекрывая изображение предмета, растр модулирует тепловое излучение. Отсюда и произошло название «модулирующий диск». Рассмотрим действие некоторых модулирующих дисков с наиболее известными и простыми растрами. Растр в виде спиральной щели (см. рис. 9.2, а). Ширина щели спирали равна половине диаметра изображения источника излучения в плоскости диска. В центре диска имеется вырез, по диаметру равный изображению. Когда изображение источника находится в центре, вся энергия его попадает на приемник, с выхода которого снимается импульс фототока (напряжения) постоянной величины. Независимо от угла поворота диска величина этого импульса не меняется (кривая 1). Модуляция потока в этом случае отсутствует. При смещении изображения от центра пропускание падает до нуля, а при повороте диска на некоторый угол α возрастает до 50% в момент пересечения спиральным вырезом изображения (кривая 2). На выходе приемника появляется короткий импульс фототока (напряжения). Фаза (время) следования импульсов будет зависеть от положения изображения в фокальной плоскости. Такой вид модуляции называется время-импульсной модуляцией. Глубину модуляции можно увеличить до 100%, увеличив ширину спирали до диаметра изображения. Секторно-радиальный растр (см. рис. 9.2, б). По мере приближения к центру ширина прозрачных и непрозрачных полос уменьшается и становится меньше диаметра изображения. На краях диска ширина прозрачных секторов равна или несколько больше диаметра изображения. В этой области при вращении диска достигается 100%-ная модуляция потока (кривая 1), а величина сигнала, снимаемого с приемника, максимальна. Если скорость вращения диска n об/мин, а число прозрачных секторов m, то частота модуляции может быть определена по формуле
При таком растре осуществляется непрерывная модуляция. При смещении изображения к центру диска частота следования импульсов не меняется, изменяется только их амплитуда, т. е. глубина модуляции (кривая 2). При совпадении изображения с центром диска модуляции не происходит и сигнал отсутствует. Эта часть диска называется мертвой зоной. Таким образом, изменение глубины модуляции в зависимости от положения изображения может использоваться для определения координат объекта при постоянной силе его излучения. Концентрический растр (см. рис. 9.2, в). Растр образован чередующимися прозрачными и непрозрачными концентрическими кольцами. Ширина колец равна половине диаметра изображения. В этом случае при вращении диска облученность приемника будет постоянной и равной половине максимальной. Этот эффект используется для исключения модуляции потоков излучения от крупных объектов типа облаков, равномерного фона и т. д. Концентрический растр применяется в сочетании с другими типами растров (см. рис. 9,2, г) для исключения влияния фона при определении координат объектов. Радиально-концентрический растр (см. рис. 9.2, г). Когда изображение пересекается концентрической частью растра, модуляция потока отсутствует. При повороте диска на угол φфаз= 90° изображение пересекается радиальной частью растра, происходит модуляция потока и появляется сигнал. По амплитуде этого сигнала можно судить о радиальном смещении изображения. Угловое перемещение относительно одной из осей можно определить по фазе начала модуляции φфаз. Отсюда следует, что модулирующий диск наряду с модуляцией излучения служит и для получения информации о направлении и величине отклонения объекта от оси диска. Если в поле зрения попадает объект с большой площадью (облако, нагретый фон земли, воды и т. д.), то в фокальной плоскости он будет изображен в виде размытого пятна, диаметр которого в несколько раз превысит ширину прозрачных секторов радиального растра. Тепловое излучение таких объектов растром модулироваться не будет. Объясняется это тем, что верхняя и нижняя половины диска имеют одинаковое соотношение прозрачных и непрозрачных полос. Изображение объектов большой протяженности, одновременно проектируясь через обе половины диска, создает постоянное (немодулированное) облучение приемника. Растр в виде «шахматной доски» (см. рис.9.2,д) состоит из прозрачных и непрозрачных квадратов, расположенных в шахматном порядке. Размер каждого квадрата соизмерим с величиной кружка рассеяния оптической системы, т. е. с размером изображения точечного предмета. Если в процессе просмотра поля зрения по растру проходит изображение точечного объекта, приемник вырабатывает серию импульсов частотой f. Фаза серии импульсов частотой f зависит от положения изображения в фокальной плоскости оптической системы. Перемещение изображения в фокальной плоскости изменяет время его нахождения в пределах растра. Фиксируя изменения длительности серии импульсов, можно определить координаты изображения. Недостатком рассмотренных типов растров является потеря 50% энергии излучения при модуляции вследствие наличия непрозрачных секторов. Полукруговой растр. Для увеличения коэффициента использования излучаемой энергии применяют модуляторы, подобные изображенному на рис. 9.2, е. При вращении такого модулятора в течение полуоборота энергия излучения полностью попадает на приемник; затем изображение перекрывается и сигнал исчезает. Фаза сигнала определяет положение изображения.
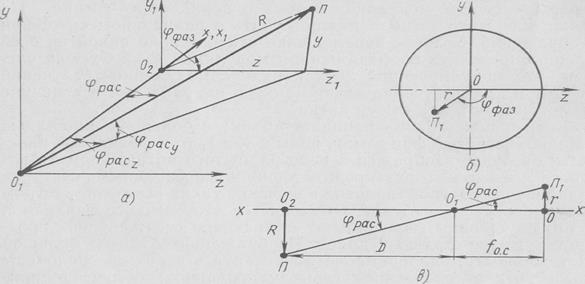
Координаторы Чтобы определить назначение координатора и понять его устройство, рассмотрим положение какого-либо теплоизлучающего объекта в пространстве относительно осей х, у, z теплопеленга-ционного прибора (рис. 9.3, а). Рис. 9.3. Схема координат, определяющая положение объекта П:
а -в пространстве; б—в фокальной плоскости оптической системы; в—относительное положение объекта и его изображения Положение объекта П относительно оси х может быть определено его координатами у и z или углом φрас. Угол между осью x теплопеленгационного прибора или каким-либо заданным направлением и линией прибор — объект называется углом рассогласования φрас; плоскость, образованная этим углом (П,О1,О2), называется плоскостью рассогласования. Составляющие углы рассогласования на горизонтальную и вертикальную плоскости дадут угол места φрас у и угол азимута φрас z (угол тангажа и курсовой угол соответственно, если прибор расположен на самолете, вертолете или другом носителе). Определив с помощью какого-либо устройства угол φрас или его составляющие, найдем положение предмета в пространстве относительно теплопеленгационного прибора. Устройство, служащее для непрерывного и автоматического определения угла рассогласования или его составляющих, называется координатором. Из этого определения следует, что координатор может быть либо теплопеленгатором, если его выходные сигналы подаются в индикаторный блок 6 (см. рис. 9.1, а), либо прибором управления, если его сигналы поступают в блок управления автоматического регулирующего устройства. В инфракрасных координаторах угол рассогласования φрас и его составляющие φраc y и φрас z в двух взаимно перпендикулярных плоскостях определяются по положению изображения объекта в фокальной плоскости оптической системы. Действительно, из рис. 9.3, б, в, видно, что каждому положению объекта П в пространстве соответствует определенное положение его изображения П1 в фокальной плоскости. Если угол рассогласования равен нулю, то изображение объекта совпадает с точкой О фокальной плоскости (см. рис. 9.3, в), через которую проходит оптическая ось. Эта точка условно называется центром фокальной плоскости. При появлении угла рассогласования изображение объекта смещается относительно центра фокальной плоскости на некоторое расстояние r, пропорциональное величине угла рассогласования. Положение радиуса r относительно какой-либо плоскости определяется углом фазирования φфаз. Зная величину г, всегда можно определить φрас (см. рис. 9.3, в) из соотношения
где f — фокусное расстояние оптической системы. Из формулы (9.2) следует, что
Принцип действия координатора заключается в том, что анализатор, последовательно просматривая фокальную плоскость оптической системы, пропускает на приемник тепловую энергию от объектов, попадающих в поле зрения системы. По положению импульса фототока, вызванного излучением обнаруживаемого объекта относительно фиксированного импульса, характеризующего начало отсчета, определяют координаты изображения объекта в фокальной плоскости, а следовательно, и составляющие угла рассогласования. Этот принцип определения координат показан на рис. 9.4. Рис. 9.4. Схема время-импульсного координатора: а—схема координатора; б—анализатор; 1—анализатор (модулирующий диск); 2—оптическая система; 3— приемник; 4—усилитель; 5— разделительное устройство; К—коммутатор; С—-конденсор; Л—лампа реле; Д—мотор привода анализатора и коммутатора К1, К2—контакты опорных напряжений; Щ—спиральный растр (щель); П1, П2, П3—изображения объекта; φ1, φ2, —углы поворота; r—радиус-вектор; в)—временные диаграммы изменения тока в реле
Координатор представляет собой оптико-электронное устройство, состоящее из объектива 2 с конденсором С, анализатора 1, приемника 3, усилителя 4 и разделительного устройства 5. Анализатор выполнен в виде плоского тонкого непрозрачного диска, в котором по определенному закону вырезана щель Щ (спиральный растр), пропускающая собираемое объективом тепловое излучение на приемник. Предположим, что щель вырезана в виде спирали Архимеда. Чтобы вся энергия, сосредоточенная в изображении предмета, попала на приемник, ширина щели делается равной диаметру изображения. Одновременно и синхронно с анализатором вращается кулачок М, являющийся коммутатором. Блок преобразования сигналов выполнен в виде электронного реле. Работа реле основана на том, что при поступлении на его последовательно двух положительных (отрицательных) импульсов напряжения, на выходе возникают токи I1 и I2, время протекания которых пропорционально времени поступления импульсов напряжения на вход реле. Координатор работает следующим образом. При вращении диска 1 и кулачка М в момент пересечения оси y рис. 9.4, б) щелью диска радиусом rтах в электронное реле через контакты К1 подается опорный импульс напряжения ОИ (см. рис. 9.4, в). При поступлении этого импульса на выходе реле возникает ток равный значению I0; в этом состоянии реле будет находиться до подачи импульса напряжения на второй контакт. При повороте диска на некоторый угол φ1 его щель пересечет изображение объекта П1 (см. рис. 9.4, б) и тепловая энергия, пройдя через щель, попадет на чувствительный слой приемника. Возникший в приемнике импульс фототока (напряжения) после усиления (импульс Ф на рис. 9.4, в) поступит на второй контакт реле, под его действием электронное реле срабатывает и ток I0 мгновенно падает до нуля (время t΄),сохраняясь на этом уровне до прихода нового опорного импульса. При равномерном вращении диска и кулачка подача в реле опорных импульсов следует через равные промежутки времени, меняется только время поступления импульса Ф от приемника, которое зависит от положения изображения объекта в фокальной плоскости объектива. Из рис. 9.4, б и в следует, что время t1 прошедшее с момента подачи в реле опорного импульса до пересечения щелью изображения объекта, пропорционально углу поворота диска φ1 а время t2, прошедшее с момента пересечения щелью изображения до вторичной подачи опорного импульса,— углу φ = 2π— φ1. Следовательно, t1 = c φ1, а t2, = с (2π— φ1), где с — коэффициент пропорциональности. Очевидно, каждому положению изображения объекта на оси y соответствует определенный угол φ поворота диска от начального положения. Например, положению П1 соответствует угол φ1., а положению П2—угол φ2. Отсюда следует, что время t1 пропорционально координате у объекта, т. е. составляющей угла рассогласования по оси у. Напряжение, снимаемое с нагрузки реле, может быть или преобразовано в пилообразную форму и подано на отклоняющие пластины электроннолучевой трубки (индикатора 6 на рис. 9.1, а) или в блок управления БУ (см. рис. 9.1, б) для отсчета угла рассогласования, или включения привода, например, электродвигателя, разворачивающего координатор. Таким образом, рассмотренный нами координатор может служить и теплопеленгатором и прибором управления. Однако координатор с анализатором, имеющим спиральный растр, практически не может быть использован, так как положениям изображения объектов П1 и /73 соответствуют одинаковые углы φ(φ1= φ3). Такая неоднозначность вносит ошибки в определение координат. Недостаток этот устраняется изменением размеров диска анализатора и размещением его в фокальной плоскости объектива так, что поле зрения оптической системы просматривается только верхней частью спиральной щели, называемой активной (рис. 9.5, а).
Рис. 9.5. Схема двухканального координатора: а—развертка диска по оси у; б—развертка диска по оси 2; б—взаимное положение диска и полей зрения оптической системы в фокальных плоскостях; 1, 2, 3—положения изображения в фокальной плоскости
Рассмотренный координатор относится к типу приборов с время-импульсным методом определения координат. Существует также фазовый метод определения координат. Схема координатора, основанного на фазовом методе, показана на рис. 9.8. Координатор имеет те же элементы, что и координатор с время-импульсным методом определения координат: объектив 1, анализатор 2 с двигателем 3, приемник излучения 4, усилитель 7, коммутирующее устройство 5—6. Отличие заключается в анализаторе. Анализатор в фазовом координаторе выполнен в виде плоского непрозрачного для ИК-лучей кругового диска, одна половина которого вырезана. При вращении диска электродвигателем 3 тепловой поток от объекта периодически через полоборота (180°) прерывается непрозрачной частью диска. При пересечении изображения объекта вырезанной частью диска приемник облучается энергией и на его выходе появляется импульс напряжения Uс длительностью t1 = T/2 (рис. 9.8, б). При перекрытии изображения непрозрачной частью диска энергия на приемник не попадает и напряжение Uс на его выходе падает. Так как прозрачная и непрозрачная части диска равны, то за один оборот длительность импульса t1 равна его спаду t2 . Частота следования импульсов
где n — число оборотов диска. Усилитель 7, настроенный на частоту f выделяет первую гармонику сигнала с приемника Uс в виде синусоидального напряжения Uус, фаза которого зависит от положения изображения в фокальной плоскости. Положение объекта в пространстве определяется изменением фазы выходного напряжения координатора. Координата (фаза) выделяется в координаторе коммутатором — механическим фазочувствительным выпрямителем. Два коллекторных кольца 5 выпрямителя 6 синхронно вращаются с диском анализатора. К коллекторным кольцам через щетки Щ1 и Щ2 подводится переменное напряжение с усилителя 7. Выпрямитель 6 представляет собой токопроводящий диск, разделенный на две половины I и II изолирующим слоем. К выпрямителю* под углом 90° подведены неподвижные щетки Щу и Щ2у с которых снимаются выходные сигналы координатора IIу и Иг, разделенные по двум каналам (осям).
Рис. 9.8. Схема координатора с фазовым методом определения координат (α) и изменение напряжения в цепи приемника Uс и на выходе усилителя Uус (б): α=0—«180°—изображение открыто; α'=180—360°—изображение закрыто
Рассмотрим принцип определения координат для нескольких характерных положений изображения объекта в фокальной плоскости. Полагаем, что диск анализатора расположен в фокальной плоскости и положение изображения совпадает с плоскостью диска. Предположим, что изображение объекта сдвинуто вверх по оси у относительно центра модулирующего диска так, что угол фазирования φфаз = π/2 (рис. 9.9). При вращении модулирующего диска в цепи приемника излучения возникнут импульсы фототока в соответствии с диаграммой, показанной на рис. 9.9, а. Первый импульс фототока (сигнал появится одновременно с началом вращения диска и закончится после того, как диск повернется на угол α = π, когда изображение перекроется непрозрачной частью диска; второй импульс появится при повороте диска на угол α = 2π и закончится при α= 3π и т. д. Первая гармоника UуС напряжения сигнала на выходе усилителя имеет вид, показанный на рис. 9.9, б. Со щеток Щу и Щz будут сниматься напряжения, изменение которых показано на диаграммах рис. 9.9, в, г. Из диаграмм видно, что постоянная составляющая переменного напряжения, снимаемого со щеток Щz) равна нулю, так как + Uz =— Uy . Постоянная составляющая сигнала При смещении изображения вправо по оси z, когда угол фазирования φфаз = 0, импульсы фототока будут формироваться в соответствии с диаграммой на рис. 9.9, д. Графики изменения напряжения UуС на выходе усилителя и напряжений Uу и Uz, снимаемых со щеток Щу и Щz коллектора, будут иметь вид, показанный на рис. 9.9, е, ж, з соответственно. Как видно из этих графиков, в этом случае суммарный сигнал Uу равен нулю (+Uу =- Uz,), а постоянная составляющая сигнала В общем случае при смещении изображения на некоторый угол φфаз средние значения напряжений Uу и Uz будут равны
где Если угол рассогласования равен нулю (изображение находится в центре диска анализатора), в цепи приемника протекает постоянный ток, так как при вращении диска все время будет открыта половина изображения. В этом случае средние значения Uу и Uz равны нулю. Принципиальным недостатком координатора, основанного на таком методе определения координат, является отсутствие зависимости выходного сигнала от величины угла рассогласования. В результате совместного воздействия напряжений Uу и Uz определяется только направление на объект. При таком методе координатор может работать лишь в режиме приведения изображения в нулевое положение по принципу «да — нет». Недостаток устраняется путем применения диска с перемен-ной прозрачностью, изменяющейся по закону светового клина (рис. 9.10, а).
Рис. 9.10. Схема модулирующего диска с переменной прозрачностью. а—диск с переменной прозрачностью; б—графики изменения напряжений после прохождения излучения через диск с переменной прозрачностью; в—радиальный растр; г—изменение сигнала при прохождении через диск переменной прозрачности с радиальным растром
Прозрачность материала диска линейно изменяется вдоль диаметра АВ, уменьшаясь от максимальной τА в точке А до нуля τв в точке В. Для всех остальных точек диска, лежащих на прямых, перпендикулярных диаметру АВ, прозрачность постоянна и равна прозрачности соответствующей точки диаметра АВ. Например, прозрачность всех точек диаметра ЕЕ одинакова и равна прозрачности точки О. Из рисунка легко определить, что прозрачность любой точки диска, удаленной от центра О на расстояние R, составляющее с осью ЕЕ угол φ, будет равна
Действительно, для точки С, например, прозрачность согласно определению будет равна прозрачности точки D (точки лежат на одной прямой), т. е. Отрезок ОД определяющий на графике прозрачность точки О, равен
где k1 — удаление точки от центра диска, выраженное в долях R. При вращении диска поток излучения, проходя через диск будет модулироваться по закону синуса, т. е.
Если анализатор (модулирующий диск) 2 (см. рис. 9.8) сделать с переменной прозрачностью, изменяющейся по закону (9.6), то значение Umах не будет постоянным для всех положений изображения. Оно будет изменяться пропорционально изменению радиуса r и будет равным Umах = сr. Подставляя эту величину в формулу (9.5), получим
Из этих формул следует, что напряжения Uу и Uz однозначно определяют координаты объекта в пространстве. Однако и этот метод определения координат обладает некоторыми недостатками. Одним из них является зависимость выходных сигналов от плотности потока. Эта зависимость проявляется в том, что если даже угловое положение объекта в пространстве не меняется, но увеличивается (уменьшается) мощность его излучения (например, при приближении к координатору), то выходной сигнал координатора изменяется, выдавая ложную координату. Увеличение или уменьшение потока излучения как бы искусственно изменяет прозрачность диска и тем самым создает ошибку в определении координат. Для исключения этой ошибки вводится непрерывная модуляция потока частотой f. Поток модулируется радиальным растром, нанесенным на диск с переменной прозрачностью (рис. 9.10, в). Растр и глубина модуляции выбираются так, чтобы выходной сигнал, промодулированный частотой f, зависел только от мощности излучения объекта независимо от его положения относительно оси координатора. Для этого необходимо ширину секторов растра диска сделать большей диаметра изображения при любом его положении в фокальной плоскости. При вращении такого диска и наличия угла рассогласования сигнал на выходе приемника представляет собой напряжение, промодулированное двумя частотами — несущей f растра и огибающей сигнала f΄, обусловленного переменной прозрачностью. Сигнал несущей частоты и огибающей выделяется в усилителе специальными электрическими фильтрами, настроенными соответственно на частоты f и f΄. После выделения сигнала несущей частоты он подается в виде обратной связи на вход усилителя. В этом случае при увеличении плотности потока и неизменном положении объекта максимальное значение сигнала частоты f увеличится по сравнению с предыдущим.
Рис. 9.11. Схема системы фазово-импульсного координатора: а—схема устройства координатора; б—формирование управляющих сигналов: " 1— приемник; 2—зеркало; 3—коммутатор; I, II, III, IV—^чувствительные элементы приемника
Поданный на вход усилителя с обратным знаком, он автоматически уменьшит силу сигнала, в результате чего выходное значение амплитуды огибающей частоты f ' останется постоянным. Ошибка в определении координаты будет устранена. Для удобства понимания метода определения координат с помощью такого диска мы рассмотрели работу механического ■фазочувствительного выпрямителя. В практике для этих целей используются электронные устройства, называемые фазовыми дискриминаторами. Существуют координаторы и без применения модулирующих дисков, так называемые безрастровые системы. К таким координаторам можно отнести систему с импульсно-фа-зовой модуляцией теплового потока. Принцип действия такого координатора показан на рис. 9.11. Координатор состоит из двух- или четырехплощадочного крестообразного уголкового приемника излучения 1, вращающегося зеркала 2 и коммутатора 3. Оптическая ось зеркала составляете продольной осью координатора угол а. При вращении зеркала его оптическая ось описывает окружность. Если угол рассогласования между оптической осью зеркала и направлением на объект равен нулю, то изображение объекта в фокальной плоскости зеркала (в плоскости приемника) при его вращении перемещается по окружности, симметричной относительно всех элементов приемника. В этом случае (рис. 9.11, б) изображение 4 пересекает все элементы приемника /—IV через равные промежутки времени; выходной сигнал, поступающий с приемника Цс, представляет собой последовательность импульсов, отстоящих друг от друга на одинаковом расстоянии. При появлении рассогласования изображение объекта 5 в фокальной плоскости зеркала смещается относительно центра креста (уголка) приемника. Теперь уже при вращении зеркала временные интервалы между пересечениями изображением 2 соседних элементов приемника I—IV становятся не одинаковыми, так как центр окружности вращения сместился относительно центра приемника. Путем сравнения интервалов времени Δt с опорными импульсами ОИ, снимаемыми с коммутатора 3, определяют угловые координаты объекта φрас. Изучив методы определения координат и принципы построения координаторов, рассмотрим устройство отдельных типов теплопеленгаторных приборов.
§ 9.2. ОБЗОРНЫЕ (СКАНИРУЮЩИЕ) ТЕПЛОПЕЛЕНГАТОРЫ
Теплопеленгационные устройства подразделяются на два класса приборов: обзорные и обзорно-следящие, или следящие. Последняя группа приборов значительно отличается по конструкции и характеристикам от обзорных устройств и широко применяется в системах автоматического регулирования. Устройство этих приборов будет рассмотрено в следующем разделе. Обзорные теплопеленгаторы предназначены для решения более простой задачи: поиска и обнаружения теплоизлучающих объектов и определения направления на них. Положение обнаруженных объектов может или визуально наблюдаться на экране электроннолучевого индикатора, или фиксироваться в виде электрических сигналов, пропорциональных угловым координатам. Обзорные теплопеленгаторы могут применяться в астрофизических и космических исследованиях, в аппаратуре тепловой разведки местности, обнаружения воздушных и наземных целей. Для обнаружения теплоизлучающего объекта необходимо получить тепловое изображение местности (пространства). Тепловое изображение местности, называемое тепловой картой, представляет собой последовательную или одновременную запись сигналов, получаемых от фона (местности) и теплоизлучающих объектов (предметов). Тепловые излучения от фона и объектов после преобразования их в электрические сигналы могут быть зафиксированы на фотопленке (см. § 8.2), записаны на магнитную ленту или самопишущее устройство. Сравнением этих записей с сигналами, проэталонированными по температуре, получают тепловые карты местности или отдельных объектов. Таким образом, чтобы получить тепловое изображение местности, необходимо последовательно ее просмотреть, т. е. осуществить обзор. Имеется несколько методов обзора (сканирования) местности, из которых наибольшее применение получили механический и оптический способы. Механический способ сканирования состоит в том, что оптическая система с приемником осуществляет обзор (сканирование) за счет движения в двух плоскостях. В движение система приводится с помощью электрических двигателей или гироскопа. Механические системы имеют ограниченные угловые скорости сканирования (обзора), достигающие 250 град/с. Эти скорости позволяют просмотреть за секунду поле зрения примеро 16Х 16 градусов. В современных авиационных и космических системах необходимо просматривать в 1 секунду поле зрения не менее 120x20 градусов, т. е. иметь угловые скорости в десять раз большие, чем у механических систем. Для этих целей применяют оптические методы сканирования, осуществляемые путем перемещения оптической системы вокруг собственных осей. Оптическая система совершает колебательные, вращательные или вращательно-колебательные движения. В результате таких движений поле зрения оптической системы просматривает местность в определенном угле обзора наподобие антенны радиолокатора. В момент пересечения осью системы теплового излучения от объекта на выходе приемника появляется сигнал, определяющий положение объекта относительно начала отсчета. Время, в течение которого система просматривает заданный угол поля зрения, называется периодом обзора. Оптическая система может просматривать местность по принципу построчной или телевизионной развертки, по спирали или любому заданному закону. Закон движения оптической системы определяется кинематической схемой системы поиска. В авиационных и космических теплопеленгаторах, предназначенных для снятия тепловых карт Земли и обнаружения наземных и воздушных объектов, наибольшее применение нашел метод построчной развертки местности. Построчный метод обзора местности состоит в том, что просмотр (сканирование) местности осуществляется только в одном направлении, в виде строки. Кадр получается путем последовательного сложения строк. Осуществить это можно с помощью теплопеленгатора, оптическая система которого показана на рис. 9.12, а. Оптическая система состоит из вращающегося зеркала 1 и объектива 2, направляющего отраженное от зеркала 1 излучение на приемник 3. Теплопеленгатор устанавливается на авиационном или космическом носителе так, что ось вращения зеркала 1 параллельна направлению движения носителя, а линия визирования направлена вниз, на Землю. Вращением зеркала просматривается узкий, в виде строки, участок местности на Земле под прямым углом к направлению движения носителя. При движении носителя вперед осуществляется суммирование (кадрирование) просмотренных зеркалом строк (см. рис. 9.12, б). Кадр может быть получен и с помощью зеркала, если после просмотра строки его мгновенно разворачивать на некоторый угол вокруг второй оси. перпендикулярной движению носителя. В этом случае будет телевизионная развертка местности.
Рис. 9.12. Оптическая схема теплопеленгатора для снятия карты местности (а) и схема обзора местности с самолета (б): 1—обзорное (сканирующее) зеркало; 2—объектив; 3—приемник
Чтобы последовательные линии развертки (участки местности) точно прилегали друг к другу, необходимо соблюдать ряд условий. Важнейшими из этих условий являются выбор скорости сканирования и мгновенного угла поля зрения оптической системы в зависимости от высоты и скорости полета носителя. Указанные параметры выбираются следующим образом (см. рис. 9.12,6). Если мгновенное поле зрения системы в направлении полета составляет Δβy радиан, то при сканировании зеркала на Земле образуется строка, ширина которой
где Н — высота полета. Эта ширина строки является расстоянием, которое может пройти носитель между двумя последовательными строками, чтобы не было пропусков или перекрытий изображений. Следовательно, скорость носителя при образовании п строк в секунду должна быть меньше
Угловая скорость развертки для одной строки
Отношение v/Н в формуле (9.11) характеризует угловую скорость (рад/с), с которой точка на Земле следует под носителем. Важно выбирать это отношение таким, чтобы просматриваемая местность находилась перед носителем. При просмотре зеркалом строки со скоростью ω мгновенный угол Δβz = βΔt. Если Δβz соответствует угловому размеру приемника излучения, то величина Δt будет временем, в течение которого изображение находится на приемнике, или временем, в течение которого излучение попадает на приемник Δt = Δβz./ω. Подставив значение со из (9.11), получим
Если в системе Δβz = Δβy= Δβ, то длительность импульса на приемнике
Соотношение (9.13) является важной величиной при расчете усилителя (см. гл. XI). Чтобы приемник успевал реагировать на излучение, длительность импульса должна быть не менее постоянной времени егот, т. е. Следовательно,
откуда
Из формул (9.15) и (9.16) следует, что мгновенное поле зрения теплопеленгатора, предназначенного для снятия тепловой карты местности, определяется отношением скорости полета носителя к высоте и постоянной времени приемника. Применение мозаичных приемников существенно улучшает характеристики теплопеленгатора. Покажем это на примере. Предположим, что теплопеленгатор установлен на спутнике Земли, летящем на высоте H=1000 км со скоростью 8 км/с, и использует в качестве приемника сернистосвинцовый фоторезистор (τ = 2-10-4 с) с числом элементов N= 1. В этом случае
При высоте в 1000 км это позволит различать теплоизлучающие объекты размерами 3x3 км. Такими объектами могут быть облака, города и т. д. Если использовать приемник в виде линейки из 100 элементов, то Δβ составит 3-10-4 рад, что позволит различать объекты размерами 300x300 м. Применив при этом приемник из сурьмянистого индия с τ = 2 10-6 с, можно с помощью теплопеленгатора выделять на местности объекты размерами 30x30 м, т. е. иметь довольно подробную тепловую, карту местности. Поэтому используются мозаичные системы с очень большим количеством приемников. Однако применение мозаичных приемников вызывает конструктивные трудности — необходимо несколько усилителей фототока (по числу чувствительных элементов) или же коммутирующее устройство, поочередно подключающее элементы мозаики к общему усилителю. Известны три типа теплопеленгационных систем с мозаичными приемниками: — каждый элемент мозаики имеет отдельный усилитель; — каждый элемент мозаики поочередно подключается к общему усилителю; — мозаичный инфракрасный видикон. Угол обзора в мозаичной системе определяется величиной мозаики и объективом. Обзор местности осуществляется неподвижным лучом, образованным каждым элементом мозаики. В этом одно из достоинств мозаичных систем. Тепловое излучение от объекта, промодулированное диском, фокусируется оптической системой на один из элементов мозаики. С помощью коммутатора, ротор которого поочередно обегает все элементы мозаики, сигнал подается на вход усилителя. Усиленный сигнал поступает на электроннолучевой индикаторный прибор, развертка луча которого синхронизирована с движением ротора коммутатора и качанием зеркала. Поэтому положение светящейся точки на экране индикатора соответствует положению изображения предмета относительно центра мозаики. На таком принципе основана работа американского теплопеленгатора СОDES, принципиальная схема которого приведена на рис. 9.13, а оптическая — на рис. 9.14. Пеленгатор состоит из сканирующего (принимающего поток излучения Ф) зеркала 6 с датчиком координат 7, осуществляющего поиск (обзор), объектива 2, модулятора 3, апертурнойдиафрагмы 5, мозаики из элементов 4 с накопительными электрическими фильтрами 8, коммутатора 11 с приводом 9, усилителя 12, генератора пилообразных напряжений 10 и электроннолучевого индикатора 1. Апертурная диафрагма служит одновременно и фильтром, который в нее вмонтирован. Фильтр пропускает излучение в полосе 1,8—2,7 мкм. Модулятор представляет собой сетку из 60 вертикальных нитей с интервалом между ними 0,0432 мм. Поверхность сетки изогнута по форме фокальной плоскости корригирующей линзы и имеет размеры 31,75x3,81 мм. Мозаика состоит из 30 элементов размером 1x2 мм, расположенных вертикально. Элементами служат сернистосвинцовые фоторезисторы. Мгновенное поле зрения оптической системы и одного элемента в горизонтальной плоскости (по азимуту) 2,7°, в вертикальной (по углу места) 1,3°. При сканировании в горизонтальной плоскости просматривается пространство под углом в 90°; в вертикальной плоскости просмотр осуществляется при последовательном подключении чувствительных элементов ко входу усилителя. Сигналы, снимаемые с чувствительных элементов, накапливаются в специальных колебательных контурах, настроенных на частоту 8 Гц. Сигнал в контуре сохраняется на время «опроса» коммутатором всех элементов. Конденсатор С не пропускает на контакты коммутатора постоянную составляющую сигнала. Коммутатор чмеет 60 ламелей, что позволяет за один оборот ротора дважды подключить к усилителю каждый из 30 контуров. Усилитель собран на пяти транзисторах и имеет узкополосный фильтр. Для получения большого соотношения сигнал/шум полоса пропускания усилителя Δf=40 Гц и согласована с длительностью импульса с одного элемента мозаики τ = 0,023 с. г Рис. 9.13. Блок-схема теплопеленгатора с мозаичным приемником:
/—электроннолучевой индикатор; 2—-объектив; 3—модулирующая сетка; 4—приемники мозаики; 5—диафрагма; 6—сканирующее зеркало; 7—датчик координат; 8—электрические фильтры; 9— привод; 70—генератор пилообразных напряжений; //—коммутатор; 12—усилитель
Полное время просмотра поля обзора 1,5 с. В табл. 9.1 при. ведены основные параметры теплопеленгатора с сернистосвинцо-вым приемником. Для снятия тепловой карты местности могут использоваться теплопеленгаторы, сконструированные по типу радиометра «Оп-титерм», рассмотренного в гл. VIII. Такой теплопеленгатор обладает большой разрешающей способностью и, просматривая местность с помощью сканирующего зеркала, обеспечивает на экране электроннолучевого индикатора изображение обнаруженных предметов в виде контуров, по которым можно распознать предметы на местности (тепловидение). Таблица 9.1 Характеристика теплопеленгатора
Из других способов получения построчной развертки следует отметить применение системы вращающихся объективов (рис.9.15). Система состоит из
Рис. 9.14. Схема оптической системы тепло- Рис. 9.15. Схема теплопелен-пеленгатора (позиции те же, что на рис. гатора с вращающимися 9.13) объективами: 1—объективы; 2—экран; приемник вает поле зрения приемника и обеспечивает прием излучения одновременно только от одного объектива. Для просмотра пространства в другой плоскости оси объективов смещены по вертикали так, что каждый объектив дает свою строку (п строк при мозаичном приемнике). Если, например, поле зрения каждого объектива составляет 30°, то с помощью четырех объективов в этой плоскости можно просмотреть местность в поле зрения 4x30° =120°, а в двух плоскостях — 30 X 120°.
СПИРАЛЬНАЯ РАЗВЕРТКА
Изображение местности (пространства) может быть получено также при сканировании (обзоре) оптической системы по спирали. Наиболее просто спиральная развертка местности получается вращением с разными скоростями двух соосно расположенных оптических клиньев (рис. 9.16). Один вращающийся клин позволяет производить сканирование по кругу постоянного диаметра. Эффективность сканирования повышается при использовании мозаичных приемников. При применении приемников в виде линейки одно сканирование сразу даст число строк, равное числу чувствительных элементов в линейке.
Рис. 9.16. Схема получения спиральной развертки: 1, 2—оптические клинья; 3—объехтив; 4—развертка
Рис. 9.17. Схема оптико-механического устройства для получения спиральной развертки: 1—сканирующее зеркало; 2—ролик; 3—кулачок; 4—зубчатая передача; 5—электродвигатель; 6—электромагнитные датчики; 7—пружина
Спиральная развертка может быть получена также при использовании оптико-механического устройства, показанного на рис. 9.17. В этом устройстве плоское зеркало 1 укреплено на валу электродвигателя 5 так, что может наряду с вращением совершать некоторые отклонения в плоскости вала. Двигатель 5 приводит также во вращение кулачок 3. Скорость вращения кулачка значительно меньше скорости вращения зеркала. На зеркале установлен ролик 2, который пружиной прижимается к кулачку 3. При вращении вала двигателя 5 зеркало, совершая вращательно-колебательное движение, осуществляет сканирование по спиральной траектории. Для отсчета координат служат магнитные датчики 6, расположенные в плоскости зеркала под углом 90°. При вращении металлического зеркала в обмотках магнитных датчиков возникают напряжения, которые используются для отсчета координат.
§ 9.3. ИК-ПРИБОРЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
В практике очень часто требуется не только обнаружить какой-либо объект, определить его координаты, но также и навести на него прибор наблюдения. Так, при астрофизических исследованиях очень часто встречается потребность в автоматическом наведении телескопа на какую-либо звезду; при космических полетах спутник Земли или космический корабль автоматически ориентируется с помощью прибора управления, называемого ориентатором. Наконец, в военной технике для увеличения точности попадания снаряда в цель необходимо корректировать траекторию его полета по мере движения цели. В большинстве этих случаев для управления объектом назовем его объектом регулирования, может быть использован один из описанных выше координаторов. Однако процесс управления снарядом при существующих скоростях полета ракет настолько сложен, что для его управления требуются весьма сложные приборы. Управляемые снаряды, как известно, снабжаются устройствами, позволяющими изменять траекторию снаряда в процессе его полета. Отсюда следует, что применение простого координатора, хотя и возможно в принципе для управления снарядом, но недостаточно. Для этих целей используют систему управления, т. е. совокупность устройств, определяющих относительное положение снаряда и цели и вводящих поправки в траекторию полета снаряда. Если информация о положении цели поступает непосредственно от нее, отличаясь по каким-либо физическим принципам от окружающих предметов и фона, то система называется самонаводящейся. Системы, использующие для управления снарядом тепловое излучение целей или тепловой контраст их по отношению к окружающему фону, называются инфракрасными (тепловыми) системами самонаведения. В практике тепловые системы самонаведения очень часто называют просто тепловыми головками самонаведения или сокращенно ТГС .
Системой автоматического регулирования называется динамическая замкнутая система, которая может сохранять с достаточной точностью заданные соотношения между некоторыми величинами, определяющими ее поведение, при помощи их сравнения, и использовать получающиеся при этом сигналы для управления объектом. На рис. 9.18 показана блок-схема системы автоматического регулирования.
Рис. 9.18. Блок-схема системы автоматического регулирования: 1—программное устройство; 2—чувствительный элемент регулятора; 3—усилитель; 4—регулирующий орган; 5—объект регулирования; 6—возмущающие силы; С—связь; АР—автоматический регулятор
Основными элементами системы являются регулируемый объект 5 и автоматический регулятор АР. Кроме того, к системе можно отнести программное устройство 1. Регулятор состоит из чувствительного элемента 2, усилительно-суммирующего устройства 3 и регулирующего органа 4. При отсутствии возмущающих сил регулируемый объект работает по закону, заданному программным устройством 1, выполняя, например, операцию х0. Под воздействием силы 6 объект отклоняется от заданной программы, это отклонение (возмущение) через связь С передается на чувствительный элемент 2 регулятора. Разностный сигнал между заданной программой и возмущающим воздействием поступает в усилитель, а затем через регулятор 4 управляет объектом, устраняя возмущающее воздействие. Система самонаведения должна соответствовать по структуре системе автоматического регулирования и обладать ее свойствами. Поэтому при разработке инфракрасных (тепловых) систем самонаведения все расчеты ведут на основании общих законов и методов теории автоматического регулирования.
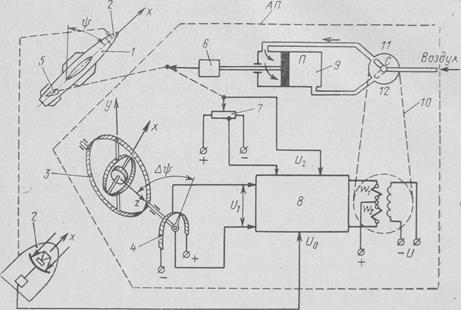
Рис. 9.19. Принципиальная схема системы управления снарядом: 1—снаряд; 2—чувствительный элемент; 3—гироскоп; 4— потенциометр; 5—руль; 6—редуктор. 7—обратная связь; 8—усилитель; 9— рулевая машина; 10—пневмореле; 11, 12—отверстия рулевой машинки; АП—автопилот; С—сопло пневмореле; П—поршень рулевой машинки
Рассмотрим некоторые общие принципы работы системы автоматического регулирования применительно к управляемому снаряду. Предположим, что надо попасть реактивным снарядом 7, снабженным аппаратурой управления (рис. 9.19), в некоторую неподвижную цель. Снаряд 1 является регулируемым объектом, а регулятором служит автопилот АП; регулируемой величиной будет угол упреждения (рассогласования) ψ, отсчитываемый от заданного направления, например от вертикали. Чувствительным элементом регулятора является свободный гироскоп 3, установленный на снаряде так, что ось его ротора направлена вдоль продольной оси снаряда х. С осью внешней рамки гироскопа жестко связан движок потенциометра 4. Потенциометр неподвижно укреплен в корпусе снаряда. При повороте снаряда вокруг оси z на какой-то угол Δψ на этот же угол развернется и корпус потенциометра. Движок потенциометра останется в прежнем положении, так как ротор гироскопа будет стремиться сохранить свое положение в пространстве неизменным. Следовательно, потенциометр развернется относительно движка на угол Δψ. Этот поворот нарушит равновесие моста, вследствие чего на вход усилителя 8 поступит напряжение U1 пропорциональное углу Δψ. В зависимости от знака напряжения U1 сигнал с усилителя поступает на одну из обмоток ω1. или ω2 пневматического реле 10. Под воздействием тока, протекающего в обмотках, реле срабатывает и подводит сопло С к отверстию 11. Под воздействием сжатого воздуха поршень П рулевой машинки 9 придет в движение и через редуктор 6 отклонит рули 5. Отклонение рулей 5 вызовет изменение угла атаки снаряда и соответственно изменит аэродинамические силы. Под воздействием этих сил снаряд возвратится в первоначальное положение. При этом установится равновесие электрического моста в потенциометре, напряжение U1 станет равным нулю, реле обесточится и сопло С займет нейтральное положение. Таким образом, воздействием рулей на снаряд замыкается цепь автоматического регулирования. Для уменьшения ошибок в систему вводится обратная отрицательная связь 7 между рулями и усилителем. Недостатком рассмотренной системы управления является отсутствие связи системы с целью. Достаточно цели изменить свое положение и снаряд пролетит мимо. Для связи снаряда с целью вводится дополнительный чувствительный элемент 2, автоматически реагирующий на отклонение снаряда от направления на цель. С введением этого элемента схема управления становится самонаводящей. Элементом, чувствительным к перемещению цели относительно снаряда, служит головка самонаведения, в нашем случае тепловая. Тепловое излучение цели принимается головкой и преобразуется в сигнал, пропорциональный углу между осью головки (снаряда) и направлением на цель. Этот сигнал в виде напряжения U0 подается в усилитель автопилота, где он суммируется с сигналами датчика 3 (гироскопа). Теперь движение снаряда будет происходить следующим образом (рис. 9.20). В первоначальном положении снаряд летит к цели под заданным углом ψ0 (см. рис. 9.20, а). Угол между осью головки (снаряда) и направлением на цель, который мы ранее назвали углом рассогласования φ, будет равен нулю. Предположим, что цель Ц за время t переместилась из точки А в точку Б на расстоянии АБ =v t, где V — скорость движения цели. В результате этого перемещения появится угол рассогласования φ(см. рис. 9.20, б), не равный нулю. Если не изменить траекторию полета снаряда, он пролетит мимо цели, так как угол ψ0 остался неизменным. В этот момент вступает в действие тепловая головка самонаведения. Сигнал с ТГС воздействует на рули, заставляя их повернуться в соответствующую сторону на угол
Под воздействием аэродинамических сил снаряд изменит траекторию и полетит в направлении на цель. Однако за время процесса регулирования снаряд пройдет какой-то путь, который
Рис. 9.20. К процессу движения снаряда к цели: а—положение снаряда в момент пуска; б—положение снаряда и цели по прошествии времени б—схема регулирования
снова вызовет появление добавочного угла рассогласования Как в первом, так и во втором случае снаряд пройдет мимо цели. Кроме того, при перерегулировании возникают большие колебания снаряда на траектории, которые могут привести к разрушению отдельных элементов системы управления и вывести снаряд из строя. Оба явления можно устранить, если заставить регулятор вступать в действие с полной эффективностью при появлении даже незначительного рассогласования и автоматически снизить его эффективность при уменьшении угла φ, т. е. при подходе снаряда к направлению на цель. Такая работа системы достигается введением дополнительного сигнала, пропорционального производной от угла рассогласования йрД#=ф или угловой скорости движения линии «снаряд — цель». При этом угол отклонения рулей зависит не только от φ, но и от скорости его изменения ω и равен
Рис..9.21. К изменению угла его производной Физический смысл влияния величины Если отклонение рулей происходит только в зависимости от Теперь при возрастании φ (участок кривой ОА) к положительному сигналу
2. Следящие тепловые головки
Тепловые следящие головки представляют собой наиболее совершенный тип теплопеленгационных приборов. Они отличаются большой динамичностью, малой инерционностью и высокой точностью выдачи угловых координат и их производных. В этих приборах оптическая ось делается подвижной, а сама оптическая система может перемещаться в двух плоскостях и сопровождать объект при его движении. Возможность слежения за объектом отличает следящую головку от обзорных теплопеленгаторов. Принципиальная схема следящей головки приведена на рис. 9.22.
Рис. 9.22. Принципиальная схема следящей головки: 1—1—оптическая система; 2— «модулирующий диск; 3—приемник; 4— привод; 5—разделитель координат; 6—усилитель
Оптическая система 1 с модулирующим диском 2 и приемником 3 помещается в специальный карданов подвес. Сигнал от теплоизлучающего объекта после усиления его усилителем 6 через разделитель координат 5 поступает на вход привода 4. Привод через тягу карданова подвеса стремится развернуть оптическую систему с приемником так, чтобы сигнал с приемника исчез, что будет соответствовать направлению оптической оси на объект. Движение объекта (цели) вызывает непрерывный уход ее изображения от оптической оси, вследствие чего возникает новый угол рассогласования В качестве привода могут быть использованы электродвигатели, а в качестве датчиков угловых скоростей — тахогенераторы, вырабатывающие сигнал В следящих головках электродвигатели мало
Рис. 9.23. Схема трехстепенного гироскопа:
Р-ротор; Н—кинетический момент; М—возмущающий момент
применяют из-за их инерционности. Кроме того головки с моторным приводом выдают сигнал, содержащий производную колебаний снаряда относительно его центра тяжести. Эта составляющая вносит ошибку в наведении. Для устранения ошибки необходимо или вычесть составляющую колебаний снаряда, или же стабилизировать всю систему самонаведения, что практически трудно осуществить. Поэтому в современных следящих головках в качестве привода используют гиромоторы. Гиромоторы практически безынерционны, имеют малый вес и большую мощность. Точность управления (привода) у них наиболее высокая из всех известных систем. Действие гироскопической следящей системы основано на свойстве трехстепенного гироскопа. При воздействии на гироскоп (рис. 9.23) внешнего возмущающего момента Му не совпадающего по направлению с осью вращения ротора Р, возникает гироскопический момент, стремящийся совместить по кратчайшему пути вектор H кинетического момента гироскопа с вектором М внешнего момента. Если угловая скорость вращения ротора Ω, то кинетический момент гироскопа равен
где J — момент и
Поиск по сайту: |
 (9. 1)
(9. 1)
 , (9.2)
, (9.2) (9.3)
(9.3)

 , (9.4)
, (9.4)
 и фиксирует отклонение изображения объекта вверх по оси у. Легко проследить, что при смещении изображения вниз по оси у сигнал Uz также будет равен нулю, а постоянная составляющая Uу изменит знак на минус, т. е. покажет, что изображение сместилось вниз.
и фиксирует отклонение изображения объекта вверх по оси у. Легко проследить, что при смещении изображения вниз по оси у сигнал Uz также будет равен нулю, а постоянная составляющая Uу изменит знак на минус, т. е. покажет, что изображение сместилось вниз. . При перемещении изображения влево по оси г эта составляющая изменит знак и зафиксирует смещение изображения влево. Если изображение сдвигается вверх и вправо так, что 0<φфаз<π/2 то в этом случае сигналы на выходе приемника и усилителя и напряжения Uу и Uz будут изменяться так, как это показано на рис. 9.9, и, к, л, м. Как видно из диаграмм изменения напряжений Uу и Uz, постоянные составляющие этих напряжений не равны нулю.
. При перемещении изображения влево по оси г эта составляющая изменит знак и зафиксирует смещение изображения влево. Если изображение сдвигается вверх и вправо так, что 0<φфаз<π/2 то в этом случае сигналы на выходе приемника и усилителя и напряжения Uу и Uz будут изменяться так, как это показано на рис. 9.9, и, к, л, м. Как видно из диаграмм изменения напряжений Uу и Uz, постоянные составляющие этих напряжений не равны нулю.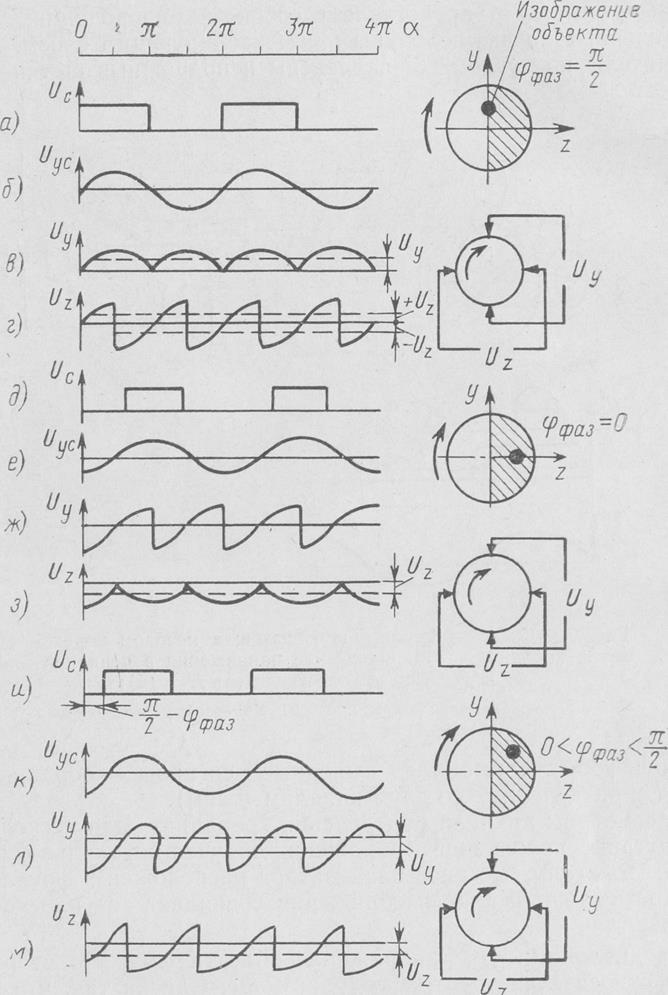
 (9.5)
(9.5) .
.
 .
. .
. , но R= ОА, что соответствует τА. Следовательно,
, но R= ОА, что соответствует τА. Следовательно,  тс. Для точек, удаленных от центра диска на расстояние
тс. Для точек, удаленных от центра диска на расстояние  , прозрачность определяется как
, прозрачность определяется как (9. 6)
(9. 6) (9. 7)
(9. 7) (9.8)
(9.8)

 (9.9)
(9.9) . Скорость носителя может быть увеличена, если вдоль оси х разместить линейку из М-приемни-ков. В этом случае
. Скорость носителя может быть увеличена, если вдоль оси х разместить линейку из М-приемни-ков. В этом случае . (9. 10)
. (9. 10) , где Т - время просмотра строки. Для n строк
, где Т - время просмотра строки. Для n строк  . При Т=1 с ω= 2πn. Подставив значение n в формулу (9.10), получим
. При Т=1 с ω= 2πn. Подставив значение n в формулу (9.10), получим . (9. 11)
. (9. 11) . (9.12)
. (9.12) . (9.13)
. (9.13) .
. , ( 9. 14)
, ( 9. 14) (9.15), (9.16)
(9.15), (9.16) (9.17)
(9.17)




 . (9. 18)
. (9. 18)
 и потребуется дополнительный доворот снаряда к цели, которая также за это время изменит свое положение. Таким образом, поворот снаряда к направлению на цель как бы запаздывает в результате недорегулирования (см. рис. 9.20, в). Если же рули заставить отклониться на несколько большую величину, чем требуется, то снаряд пройдет необходимое положение и опять появится угол
и потребуется дополнительный доворот снаряда к цели, которая также за это время изменит свое положение. Таким образом, поворот снаряда к направлению на цель как бы запаздывает в результате недорегулирования (см. рис. 9.20, в). Если же рули заставить отклониться на несколько большую величину, чем требуется, то снаряд пройдет необходимое положение и опять появится угол 

 можно пояснить следующим образом. Предположим, что угол рассогласования изменяется по синусоидальному закону (рис. 9.21, а). Тогда производная от угла будет меняться по закону косинуса (рис. 9.21,6).
можно пояснить следующим образом. Предположим, что угол рассогласования изменяется по синусоидальному закону (рис. 9.21, а). Тогда производная от угла будет меняться по закону косинуса (рис. 9.21,6). , то в точках 1 и 2 (см. рис. 9.21, а) действие рулей на снаряд будет одинаковым, так как угол рассогласования в этих точках один и тот же, ибо
, то в точках 1 и 2 (см. рис. 9.21, а) действие рулей на снаряд будет одинаковым, так как угол рассогласования в этих точках один и тот же, ибо  . Но в точке 1 угол φ возрастает, а в точке 2— уменьшается. В первом случае полезно увеличить отклонение рулей для более эффективного противодействия возрастанию φ, а во втором — замедлить разворот снаряда для предотвращения перерегулирования. Обе эти цели достигаются добавлением сигнала, пропорционального
. Но в точке 1 угол φ возрастает, а в точке 2— уменьшается. В первом случае полезно увеличить отклонение рулей для более эффективного противодействия возрастанию φ, а во втором — замедлить разворот снаряда для предотвращения перерегулирования. Обе эти цели достигаются добавлением сигнала, пропорционального  .
. добавится еще величина
добавится еще величина  того же знака. Суммарное отклонение рулей будет несколько большим, чем требуется в данный момент. Это превышение как бы предусматривает дальнейшее возрастание φ. При уменьшении угла φ. (участок кривой АБ) к сигналу
того же знака. Суммарное отклонение рулей будет несколько большим, чем требуется в данный момент. Это превышение как бы предусматривает дальнейшее возрастание φ. При уменьшении угла φ. (участок кривой АБ) к сигналу 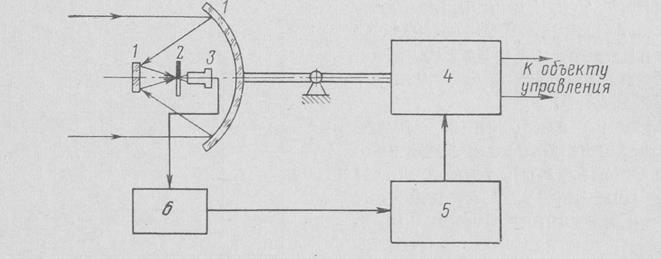
 привод должен разворачивать оптическую систему с угловой скоростью
привод должен разворачивать оптическую систему с угловой скоростью  , т. е. с угловой скоростью линии «визирования».
, т. е. с угловой скоростью линии «визирования». если их поместить на оси поворота оптической системы.
если их поместить на оси поворота оптической системы.
 , (9.20)
, (9.20)