|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Отражательные свойства различных объектов в оптическом диапазоне⇐ ПредыдущаяСтр 12 из 12
Для описания отражательных характеристик тел в оптическом диапазоне пользуются следующими величинами: 1) Лучистый поток (=мощность излучения): 2) Энергия излучения (=лучистая энергия): 3) Энергетическая сила света (=сила излучения): 4) Энергетическая светимость: 5) Энергетическая освещённость (=облучённость): 6) Энергетическая яркость (=лучистость): 7) Энергетическая экспозиция (=количество излучения):
Все поверхности для оптических длин волн являются диффузными отражающими поверхностями (исключение только для случая l << λ). Эффективная поверхность рассеяния (ЭПР) в оптическом диапазоне – это площадь рассеивающей по закону Ламберта пластины, которая ориентирована перпендикулярно линии визирования с коэффициентом отражения равным единице и создаёт такую же освещённость в точке наблюдения, что и реальное тело при облучении тем же лучистым потоком:
Часто ЭПР в оптическом диапазоне называют эффективной отражающей поверхностью (ЭОП). Габаритная яркость – отношение силы света, отражённой от тела, к площади проекции тела в направлении наблюдения:
Вводят понятие коэффициента габаритной яркости – отношение габаритной яркости к яркости, рассеивающей по закону Ламберта пластины, ориентированной перпендикулярно направлению облучения с единичным коэффициентом отражения:
Пользуются также приведённым коэффициентом габаритной яркости:
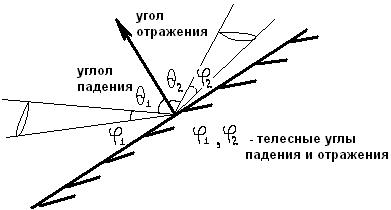
Если объект локации и излучения находятся в одном приборе (моностатическая локация), то Обычно ЭПР и Более точно рассеяние оптического сигнала описывается индикатрисой рассеяния, то есть функцией вида:
где В(Θ, φ) – яркость поверхности dS в направлении Θ, φ в результате отражения излучения с угловым распределением яркости В(Θ2, φ2). Таким образом, общая отраженная яркость будет равна:
Индикатриса рассеяния – это функция углов f(Θ1, φ1, Θ2, φ2):
ЭПР, КГЯ имеют смысл при работе активных локаторов, когда известен угол, над которым излучение падает на объект. При пассивной локации анализируется излучение отраженное (рассеянное) от вторичных источников, например, солнца, а также собственное излучение объекта Описанные выше характеристики применяются в активной локации, при пассивной локации используют другие характеристики, а именно: - поглощение, τ(λ) - отражение, R(λ) - излучение, ε(λ) Понятно, что τ(λ) + R(λ) + ε(λ) = 1. В пассивной локации рассматривается либо сигнал из-за естественного излучения, либо собственное излучение поверхности. Видно, что все эти коэффициенты зависят от длины волны. Для некоторых тел характеристики принимают вид:
В видимой и ближней ИК спектральных областях пользуются понятием спектрального альбедо
где Вводят понятие «белого» отражателя Спектральное альбеда для некоторых поверхностей приведено на графиках:
В телевизионной и тепловизионной технике пользуются понятием контраста (характеристика отражательных свойств в видимом диапазоне):
где
Тепловизионные системы наведения. К пассивным системам наведения относят ТV системы, т.к. они работают используя в качестве сигнала рассеянное целью солнечное излучение. Как правило ТV системы являются полуавтоматическими, т.е. работают с использованием оператора. На ракете (или бомбе) устанавливают передающую ТV камеру, объектив которой совпадает со строительной осью ракеты. РИС. Сигнал снимается с телекамеры, передается РТС, принимается оператором. Задачей оператора является совмещение строительной оси Р с целью РИС.
Применялись во время войны в Корее, войны с Ираком «Буря в пустыне». Недостатком является не полная автономность, работа в светлое время суток (необходимость подсветки). Зависимость от метеоусловий, ограниченная дальность видения, связанная с прозрачностью атмосферы. Достоинства. 1. При захвате цели высокая точность наведения. 2. Возможность выбора главной цели. 3. Возможность обеспечения информацией других систем РО. 4. Одновременный сбор разведданных. 5. Наличие оператора не требует устройства распознавания.
Разрешающая способность ТВ систем. Разрешающей способностью системы называется способность раздельного наблюдения двух близкорасположенных в пространстве объектов. Определяется контрастом объектов, свойствами приемной системы ТВ передающей камеры, а также свойствами приемной оптической системы (объектива). Разделяют пространственную разрешающую способность системы – минимальный угол над которым различаются два отдельных предмета 1 и 2. В ОПС угол определяется диаметром кружка рассеяния РИС.
Где d – диаметр изображения, F – фокусное расстояние ОС. Разрешающая способность зависит от следующих параметров системы: - поля зрения системы – пространственный угол, просматриваемой системой Ω, характеризуется плоским углом 2β; - мгновенного поля зрения системы, которое называется телесным углом и определяется размерами чувствительного элемента ΔΩ. РИС.
Разрешающая способность определяется также размерами чувствительного элемента поглощающего приемника или растр. Снижают разрешающую способность. Если размер УЭ или прорези растра ~d изображения, то разрешение снижается – ширина растра или УЭ должна быть
Структура и принцип работы ТВ систем. а) Параллельная передача сигналов. РИС. Последовательность передачи сигналов от элементов разложения может быть любой, Важно, чтобы все сигналы были переданы по разу за время менее 0,1 с. б) Последовательная передача сигналов РИС. В первых системах такого типа чувствительность ФП сильно зависела от площади площадки, и при уменьшении площади, т.е. увеличении количества элементов разложения, сигнал с ФП становился сравнимым с шумом. - называли системами мгновенного действия. Следующим шагом было появление электронных систем ТВ- систем с накоплением заряда. Основными стали две системы передающих трубок: 1. Суперортиконы с использованием внешнего фотоэффекта. 2. Видиконы с использованием внутреннего ФЭ (изменение проводимости ПП под действием свойств). Принцип работы суперортикона: РИС.
Принцип работы видикона: РИС.
Чувствительность и дальность действия пассивных систем. Пусть плотность потока излучения, попадающего на вход оптической системы В (Вт/см2). На приемник попадает плотность мощностью излучения равной
где κ – коэффициент усиления антенны
где Пороговая плотность энергии, воспринимая приемником равна
Дальность действия
Оценим DD для реального пр.
тогда Плотность мощности, падающая на пр. антенну и достаточную для отпора, можно оценить
где Ф – поток от объекта, улавливаемый ос. Полагая
8. Распространение лазерного излучения в атмосфере
Одним из основных факторов ограничивающих широкое распространение лазерных информационных систем (ЛИС) является ослабление лазерного излучения в атмосфере Земли. Наличие такого дестабилизирующего фактора как прохождение излучения по атмосферной трассе может свести к минимуму все преимущества лазерного источника перед другими: высокую плотность мощности, узкую диаграмму направленности, высокую пространственную и временную когерентность. Поэтому, при проектировании ЛИС, работающих в атмосфере, следует учитывать ее влияние на параметры лазерного излучения и по возможности сводить к минимуму надлежащим выбором излучателя и приемо-передающей системы. Большой объем теоретических и экспериментальных исследований посвященных вопросам влияния параметров атмосферы на монохроматическое излучение, проведенный к настоящему времени, позволяет определить основные факторы влияющие на распространение лазерного излучения в атмосфере, а также выработать методы учета и компенсации этого влияния. Наиболее существенное влияние на лазерное излучение оказывают следующие факторы: - поглощение атмосферными газами и аэрозолями; - рассеяние излучения на молекулах и аэрозолях; - искажение параметров оптического сигнала на атмосферных неоднородностях, в том числе и турбулентностью атмосферы. Ослабление направленного излучения в атмосфере подчиняется закону Бугера:
где здесь
8.1. Поглощение атмосферы
Атмосфера является селективно поглощающей средой, причем основной вклад в поглощение вносят такие атмосферные газы как углекислый газ и озон, а также пары воды. В меньшей степени на поглощение влияют метан, закись азота, окись углерода, азот, кислород и аргон. Содержание природных газов в атмосфере примерно постоянно (за исключением аномальных районов) и усредненные спектры поглощения атмосферных газов получены как расчетным так и экспериментальным путем. Усредненный спектр поглощения атмосферы (заимствованный из [ ]) приведен на Рис. В спектре пропускания атмосферы обычно выделяют восемь областей с максимальным пропусканием, называемых "окнами прозрачности" атмосферы (на Рис. показаны римскими цифрами). Именно из этих областей преимущественно выбирают длины волн передатчиков предназначенных для работы в атмосфере. Однако, в отличии от газового состава, содержание водяных паров в атмосфере существенно зависит от погодных условий, географии места, температуры, давления и ряда других факторов, что оказывает существенное влияние на коэффициент поглощения. Поэтому при оценке коэффициента поглощения учитывают поглощение в соответствующем "окне прозрачности" связанное с количество водяных паров, присутствующих на предполагаемой атмосферной трассе. Для определения содержания воды на трассе, введено понятие количества осажденной воды (высота слоя воды в мм, которая бы получилась, если весь содержащийся на трассе пар превратить в воду). Количество осажденной воды можно оценить зная T- температуру (К),
Зная количество осажденной воды на трассе, по соответствующим графикам рассчитать поглощение излучения.
8.2. Молекулярное рассеяние
Кроме поглощения наличие газов в атмосфере вызывают ослабление направленного излучения путем его рассеяния. Так как длина оптической волны соизмерима с размерами молекул газа (хотя и значительно больше последних), то часть излучения рассеивается молекулами газа (отклоняется от первоначального направления). Коэффициент молекулярного рассеяния обратно пропорционален четвертой степени длины волны и играет значительную роль только для ультрафиолетовой части спектра. Коэффициент молекулярного рассеяния выражается соотношением:
где преломления воздуха,
8.3. Рассеяние на аэрозолях
Следующим фактором в значительной мере определяющим ослабление оптических волн в атмосфере является рассеяние на аэрозолях. Коэффициент аэрозольного рассеяния зависит от соотношения длины волны лазерного излучения и размеров частиц аэрозоля, а также (в меньшей степени ) от химического состава аэрозоля, коэффициента преломления и формы частиц. Приближенно коэффициент ослабления можно оценить из соотношения:
где Зависимость
где На Рис. а) приведен приближенный вид функции Ми для значения показателя преломления n=1.33 (жидкая вода в видимой области спектра). На Рис б) приведен пример функции Как видно из приведенных соотношений, аналитический расчет коэффициента аэрозольного рассеяния, даже при наличии полных данных о параметрах аэрозоля на трассе, достаточно сложен. Кроме того, как правило, отсутствуют пригодные для расчетов данные о концентрации и типе аэрозоля на трассе локации. Особенно трудны аналитические расчеты для приземного слоя атмосферы (до высот порядка 5 км). Этот слой характеризуется наличием различных по своей природе, видам и характеристикам дымок. Дымки - состояние замутнения атмосферы, ограничивающее прямую видимость. Учитывая сказанное выше, для оценки прозрачности атмосферы в оптическом диапазоне ( и для определения атмосферного ослабления) используют эмпирическую величину - метеорологическую дальность видимости (МДВ). Для дневных условий МДВ определяют как расстояние на котором фотометрический контраст
где Вследствие того, что чувствительность глаза слабо зависит от его индивидуальных свойств и от освещения, на практике МДВ определяют как дальность видимости, на которой различима черно-белая граница на плоском щите размерами 2х2 м. Коэффициент аэрозольного ослабления атмосферы можно выразить, используя МДВ, по приближенной формуле:
Приведенное соотношение дает хорошо согласующиеся с экспериментом результаты для погодных условий характеризующихся следующим интервалом видимостей: 2 км Хорошие результаты в более широком диапазоне видимостей дает соотношение
где
Часто для приближенной оценки дальности видимости используют "Международную шкалу видимости", в которой погодным условиям с соответствующей МДВ сопоставлены баллы. "Международная шкала видимости" приведена в таблице 8.1. Таблица 8.1 Международная шкала видимости
8.4 Влияние турбулентности атмосферы на распространение лазерного излучения
Лазерное излучение распространяющееся в открытой атмосфере помимо ослабления и рассеяния подвергается и другим мешающим эффектам: отклонению от первоначального направления (преломлению или "качанию луча"), случайному изменению фазы и поляризации. Эти эффекты обусловлены турбулентностью атмосферы (перемешиванию ее слоев), которая вызывает колебания температуры, влажности и плотности воздуха, а следовательно, и его коэффициента преломления. В результате турбулентных движений в атмосфере создаются неоднородности, протяженность которых изменяется от сотен метров (и более) до миллиметров. На практике, в атмосфере присутствуют все неоднородности всех масштабов одновременно, поэтому одновременно присутствуют все указанные изменения параметров оптического луча. Мерцание звезд на ночном небе - типичный пример колебаний интенсивности и фазы проходящего через атмосферу света. Теоретическое рассмотрение вопроса о влиянии турбулентности на распространение оптического сигнала крайне сложно так как флуктуационные процессы относятся к случайным и в общем случае нестационарным процессам. При этом вместо корреляционных функций какого-либо параметра среды используют так называемую структурную, пространственную или временную функцию, введенную А.Н.Колмогоровым. Для показателя преломления среды пространственная функция определяется в виде:
между точками. Вид этой функции зависит от модели турбулентности. Для локально-изотропной и однородной турбулентности выполняется соотношение Колмогорова - Обухова (закон двух третей):
где Соотношение справедливо при условии, что
где -
Зная структурную функцию можно оценить возможные отклонения параметров излучения, прошедшего через атмосферу. Например, флуктуации угла прихода излучения
где
Флуктуации интенсивности излучения оценивают величиной:
где Для однородной турбулентности атмосферы и слабых флуктуаций:
для сильных флуктуаций:
Турбулентность атмосферы приводит к изменению фазы как вдоль, так и поперек пучка, в результате чего снижается временная и пространственная когерентность излучения. При горизонтальном распространении плоских волн степень фазовой когерентности по сечению луча оценивают величиной
Степень когерентности на реальных трассах изменяется от единиц до десятков сантиметров. Следует также отметить, что теммпературные градиенты приводят к малым изменениям плотности воздуха и, следовательно к изменению показателя преломления. Зависимость изменения показателя преломления воздуха от изменения температуры имеет вид:
Показатель преломления воздуха меняется также в зависимости от высоты
что следует учитывать при работах на вертикальных и наклонных трассах.
8.5 Методы экспериментальной оценки атмосферного ослабления
Для измерения параметров атмосферы, динамики их изменения, а также исследования макро и микро процессов происходящих в атмосфере создана большая группа лазерных приборов, получившая названия лидаров. Действие лидаров основано на эффектах дифференциального поглощения, отражения и преломления света от неоднородностей, резонансном рассеянии, комптоновском рассеянии, на флуоресценции и других эффектах. При помощи лидаров измеряют газовый состав атмосферы, ее температуру, влажность, скорость ветра, высоту и плотность облачности, интенсивность дождей и туманов, а также другие параметры. При этом используются как стационарные установки с бистатической схемой зондирования, так и мобильные, размещаемые на автомобилях или летательных аппаратах. В последние годы к классу лидаров стали относить лазерные приборы предназначенные для определения степени и характера загрязнения атмосферы промышленными отходами, приборы предназначенные для выявления аномальных атмосферных явлений и даже приборы для зондирования водных поверхностей. Подробнее с конструкциями и назначением лидаров можно ознакомиться в [ ]. На практике часто возникает необходимость оценить дальность действия (или ожидаемое соотношение сигнал-шум) лазерных систем работающих в открытой атмосфере, при этом, как правило, отсутствуют специализированные измерители прозрачности атмосферы. Этот случай наиболее характерен для автоматических лазерных устройств и приборов входящих в состав локационных или обзорно-поисковых систем. В этих случаях дальность действия (ДД) можно приблизительно оценить по величине МДВ, определяемой визуально. Для локационных систем средней и малой мощности (мощность импульса до 5 МДж) ДД МДВ. В автономных системах аналогичного назначения используют для определения ДД ряд алгоритмов связанных с измерениями параметров сигнала обратного рассеяния (СОР). При работе лазерных (моностатических) систем в атмосфере на приемное устройство кроме сигнала от цели поступает сигнал, рассеянный ближними слоями атмосферы. Принцип образования СОР поясняет схема, приведенная на Рис. . На Рис. 1- лазер, 2 - приемное зеркало, 3 - луч лазера, 4 - поле зрения приемника, 5 - фотоприемник, 6 - СОР. Мощность этого сигнала аналитически можно выразить через аппаратурную постоянную локатора
здесь
Полагая, приближенно
получаем для коэффициента рассеяния:
Используя это соотношение можно оценить коэффициент рассеяния (ослабления) по двум (или более) точкам, например (см. Рис. 20 ):
Иногда используют более грубую оценку - по амплитудному значению СОР. При этом полагают, что
При использовании последнего метода следует учитывать, что он может давать существенно завышенные результаты так как в амплитудное значение СОР могут вносить вклад сигналы рассеянные не только атмосферой, но и рассеянные на оптических
Способы обзора пространства оптико - электронными системами (сканирующие системы). 1. Радиоэлектронные системы (РЭС). Сканирование или пространственный обзор РЭС осуществляется в секторе значительно превышающим ширину диогр. направленности РИС. В РЭС время обзора связано с основными ТТХ системы: - дальностью действия, - точностью, - разрешающей способностью. Это происходит потому, что в РЭС есть возможность сужать диогр. направление → увеличивать мощи и DD, увеличивать и время обзора. Пусть max DD задана , тогда время обзора можно оценить : Минимальное время, необходимое, чтобы объект, находящийся на Dmax ______________
Если необходимо получение некоторого числа импульсов, то
Тогда время обзора сектора с _______ размерами
при этом полагаем, что все точки поля обзора равноценны, обзор равномерный. Основными способами равномерного обзора являются: - круговой (секторный) - винтовой - спиральный - конический. Круговой способ обзора предназначен для определения двух координат (2D локатор) – дальность и азимут. При этом время обзора равно
где α – ширина диогр. напр. в горизонтальной плоскости,
2. Опто - электронные системы обзора пространства (ОС). Принципиальным отличие ОЭС от РЭС является узость диаграммы направленности передатчиков, связанная со свойствами лазерного излучения. Даже в случае пассивной локации выделение малоразмерного контр. Объекта на фоне протяженной помехи имеет приоритетное значение. Т.о. характерной чертой ОЭС является узкое поле зрения активной или пассивной системы. В этой связи вопросы просмотра значительной области пространства в оптическом диапазоне принимают принципиальное значение. Т.о. для просмотра значительной области пространства ОЭС должны осуществлять обзор или значительной отл. пространства или ее изображения.
Параметры и характеристики ОЭ сканирующих систем. Основные параметры ОЭСС: - поле обзора - мгновенное угловое поле - вероятность просмотра поля обзора в заданное время - период или частота сканирования - полоса частот сигнала - коэффициент сканирования - число и размеры элементов разложения поля обзора. Периодом сканирования – (временем кадра) Тк называется время, необходимое для просмотра заданного поля обзора (и возврата в исходную точку обзора) Отношение времени просмотра поля и времени возврата поля зрения в исходную точку называется коэффициентом сканирования Частота сканирования определяется как Закон просмотра кадра определяется несколькими факторами: - известной вероятностью обнаружения цели в заданной области пространства, - возможностями сканирующего устройства, - законом перемещения носителя ОЭС. Эти факторы определяют основные требования к траектории сканирования: - полоса частот сигнала и время просмотра кадра должны быть минимальны, - не должно быть различий в получении информации от всех точек поля зрения, - конструктивная реализация траектории обзора должна быть проста и надежна. Основные ограничения. Траектории сканирования выбирают исходя из следующих требований: - формы анализируемого поля, - плотности вероятности расположения контрастных объектов, - времени просмотра, конструктивной реализации системы, учитывающей оптимальные возможности, п.п. 1.2.3. Если закон распределения целей в области поиска равномерный (нет априорных данных о расположении цели в области обзора), то закон просмотра области, как правило, равномерный (равномерная ________ кадровая развертка). Если имеются априорные данные о расположении цели в области поиска, то закон просмотра зависит от них. В частности, если можно считать, что вероятность расположения цели в области поиска подчиняется ___________, то наиболее целесообразной траекторией просмотра пространства будет спиральная. Оценим параметры спирали, если Линейная скорость просмотра зоны обзора зависит от радиуса РИС., Следовательно, время просмотра элемента поля тоже зависит от радиуса
Т.к. Минимальное время просмотра на краях зоны обзора равно Полоса пропускания определяется Меняя соотношение между угловой скоростью РИС. Т.е. построение круговой траектории осуществляется двойным вращением при при
Строчное сканирование. РИС. Число строк определяется формулой
а частота сканирования
Оптико – механические сканирующие системы. 1. Сканирование осуществляется поворотом прибора как целого РИС. 2. Перед _____ располагаются два (одно) зеркало РИС. 3. Вращение отражающей призмы (многогранной) РИС. 4. Вращение преломляющей призмы РИС. 5. Вращение набора объектива РИС. 6. Вращение клиньев РИС. 7. Матрица РИС.
Принцип действия оптико – электронных обзорно поисковых систем. При построении обзорно поисковых систем реализуют обычно два основных принципа, получение координат объекта при считывании изображения (сигнала с ФП) или с датчиков углов передающего устройства. 1. Обычно реализуется с использованием матричных приемников РИС. 24а ________ координаты элемента 2. РИС. Подается аналоговый сигнал, пропорциональный углу поворота магниторезистора. При этом ПА обычно стягивает всю область поиска РИС.
Увеличение вероятности обнаружения цели или ее параметров при помощи оптико-электронных систем. РИС. Метод вычитания изображений а) РИС. Выделение малоразмерных объектов б) РИС. Стирание грани по х, подчеркивание по у в) РИС. Поиск в определенном направлении
Проблемы комплексирования каналов на различных физических принципах. 1. Каналы, построенные на одном физическом принципе, но работающие в различных спектральных диапазонах - исследуются для измерения дальности и угловых координат с различной степенью точности. Повышение точности измерения координат на различных этапах обследуемой цели. 2. Каналы, использующие различные свойства сигналов - различные коэффициенты отражения от различных природных образований - различные излучающие свойства - свойства рассеяния, в т.ч. ____________. 3. Особенности, вязанные с диапазоном, в котором работает система. 3.1. Преимущественные методы измерения РЧД – фазовые, доплеровские ОД – амплитудные. 3.2. Физические эффекты, используемые для распознавания объектов - обнаружение таких пленок - обнаружение ___________. 3.3. Дистанции исследования и получаемая информация. 4. Задачи комплексирования: - повышение точности измерения, - увеличение дальности действия, - повышение скрытности, - качественно новые свойства систем. 5. Способы комплексирования: - объединение не связанных информационных каналов, - объединение информационных каналов с единой системой обработки данных (единый алгоритм), - объединение каналов с использованием общих источников питания, антенн, усилителей и др., - создание многофункциональной системы. 6. Известные способы комплексирования каналов. 6.1. РЛВ, ЛК – повышение точности ПЗ, решение новых задач. 6.2. ТК РЛВ – увеличение дальности, скрытности, ПЗ. 6.3. РЛВ (ТК) ТВ канал – обеспечение информации о качестве работы систем. 6.4. ИК (ТВ) ЛК – обеспечение качественно более высокую точность измерения координат.
9. Основы лазерной локации
Лазерные локаторы - приборы, предназначенные для измерения координат, дистанции и других параметров цели при помощи анализа информации, содержащейся в оптическом сигнале отраженном (рассеянном) от цели. По составу, конструкции и принципу действия лазерные локаторы подразделяют на активные и пассивные. Активные локаторы содержат передающее устройство (лазерный передатчик), при помощи которого они облучают цель, а затем извлекают информацию из отраженного сигнала, сравнивая ее с параметрами излученного. Пассивные локаторы предназначены для анализа только отраженного (рассеянного) оптического сигнала. При этом цель может облучаться лазерным излучением (источник которого расположен вне прибора), так называемые полуактивные системы. Системы, исследующие рассеянное на цели естественное освещение или фоновое излучение, следует относить к классу оптических (инфракрасных или телевизионных) систем, рассмотрение которых выходит за рамки данной работы. Активные локаторы, по параметрам передаваемого излучения и принципам обработки информации, подразделяют на импульсные и непрерывные (когерентные).
9.1. Когерентные локаторы
Когерентные локаторы излучают непрерывный монохроматический сигнал промодулированный по амплитуде высокочастотными колебаниями (с частотой в сотни мегагерц). Координаты цели определяют как координаты точки из которой пришел отраженный сигнал, точность их определения зависит от поля зрения приемного устройства. Дальность определяется числом целых и дробных полуволн модулирующего излучения (точность определения дальности составляет единицы миллиметров). Обычно, при фотодетектировании, дальность оценивается из соотношения:
где При К этому же типу относятся импульсные фазовые дальномеры, которые генерируют короткий импульс, промодулированный по амплитуде или поляризации. Грубое измерение дальности осуществляется в этом случае по времени задержки пришедшего на приемное устройство импульса по сравнению с излученным, точное по смещению фазы пришедшего импульса. Структурная схема одного из типичных фазовых дальномеров приведена на Рис. 21. Излучение (непрерывное) газового лазера 8 модулируется по интенсивности частотой 753.0212 МГц от СВЧ генератора 2, 3 с помощью электрооптического модулятора 10. Оптическое излучение, отраженное от объекта, проходит через приемный объектив 9, отражающее зеркало и направляется на фотоумножитель 17, фотокатод которого находится в поле объемного резонатора, возбуждаемого частотой 753.0250 МГц от СВЧ гетеродина 15, 16. В результате взаимодействия электрического поля резонатора с фототоком появляется сигнал промежуточной частоты 3.9469 кГц, фаза которого несет информацию об измеряемом расстоянии. Опорный сигнал промежуточной частоты образуется при смешении частот СВЧ генератора и СВЧ гетеродина в опорном СВЧ смесителе 7. После усиления опорного сигнала в усилителе 6 и сигнала с ФЭУ в усилителе 19 оба сигнала промежуточной частоты подаются на интегрирующий фазометр 18, в котором для измерения фазового сдвига используется время-импульсное преобразование. Все рабочие частоты в дальномере определяются задающим генератором 2 (частота генератора 62.75177 МГц) путем ее умножения и деления (умножитель на 12 - 3, делитель на 4 - 1, делитель на 3980 -4). Система фазовой автоматической подстройки частоты - 5 обеспечивает равенство опорной и эталонной частот и их фаз путем управления частотой гетеродина. Фазовые дальномеры наиболее широкое использование получили в строительстве и геодезии, где важно точно измерять расстояния до неподвижных объектов (с точностью до долей миллиметра). Как правило, такие дальномеры работают по оптическим уголковым отражателям, закрепленным на объектах, что позволяет получить дальность действия до единиц километров. Проработаны также варианты лазерных систем стыковки космических аппаратов, обеспечивающих высокую точность и не подверженных влиянию атмосферы.
9.2. Импульсные локаторы
Импульсные локаторы содержат в качестве передатчика импульсный лазер, работающий в моноимпульсном режиме. Дальность до объекта локации измеряется по времени задержки между излученным и отраженным от цели импульсом, достигнувшим приемного устройства:
где Угловые координаты цели, как и в когерентной локации, определяются направлением, с которого принят отраженный сигнал. Ошибка измерения определяется величиной поля зрения приемной системы и расходимостью лазерного излучения. Ошибка измерения дальности в импульсной локации существенно выше, чем в когерентной и достигает единиц метров. Эта ошибка вызвана тем, что зондирующий импульс имеет конечную длительность (для разных типов затворов от единиц наносекунд до десятков микросекунд) и крутизну фронтов. Дисперсию измерения дальности можно оценить неравенством:
где Структурная схема типового импульсного локатора приведена на Рис. 22. Синхронизирует работу устройства задающий генератор - 1, импульсы которого одновременно открывают электрооптический затвор (ЭОЗ) - 3, запускают генератор тактовых импульсов - 6, аналого-цифровой преобразователь (АЦП) - 12 и схему автоматической регулировки усиления - 13. При открытом ЭОЗ излученный лазером -2 моноимпульс попадает на отклоняющие зеркала -4, связанные с датчиками углов - 5. Информация об углах а направлении которых излучен импульс считывается АЦП и поступает на схему "И". При попадание в поле зрения приемной антенны - 9 достаточной энергии отраженного от цели оптического излучения, фотоприемное устройство -8 вырабатывает сигнал, поступающий через усилитель -7 на генератор тактовой частоты и останавливающий его. Тот же сигнал открывает схему "И" и информация о координатах и числе тактовых импульсов поступает в вычислитель в котором содержатся данные о собственных координатах локатора. На выходе вычислителя получают истинные координаты цели или иную, связанную с ними информацию. Импульсные лазерные локаторы нашли самое широкое применение в различных областях науки и техники в ряде случаев заменив радиолокационные системы и устройства. Их неоспоримым достоинством является возможность обнаруживать диэлектрические поверхности, различать близко расположенные объекты, измерять габариты и курсовые углы целей, а также высокая помехозащищенность этих устройств. Невысокая скорость обзора пространства и влияние погодных условий на работу приборов ограничивают возможности их использования. В настоящее время импульсные локаторы и дальномеры используются в системах корабельной навигации, в системах коррекции орбит радиоуправляемых спутников, в военной технике, в частности, в системах управления огнем танков и самоходных артиллерийских установок, в системах наведения управляемого оружия и др. Одним из наиболее перспективных направлений лазерной локации в последнее время представляется импульсная локация при когерентно-импульсной обработке сигнала. При этом последовательность импульсов представляется и обрабатывается как квазигармонический сигнал. Такие системы, по-видимому, будут совмещать достоинства обоих способов локации - высокую точность определения дистанции до цели с относительно высокой дальностью действия.
9.3. Уравнение лазерной локации
Низкая мощность излучения лазерных передатчиков, а также существенное ослабление оптического излучения атмосферой делают необходимым предварительную оценку дальности действия локаторов в зависимости от их основных параметров: мощности излучения (импульсной мощности), чувствительности приемного устройства, размеров приемной и передающей оптики, а также ожидаемых характеристик цели и атмосферной трассы. Все эти параметры можно связать аналитически, используя уравнение оптической локации. Вследствие того, что расходимость лазерного излучения мала, ситуации при которых лазерный луч полностью вписывается в размер цели, имеют место в значительном числе случаев. Поэтому указанную ситуацию следует рассмотреть отдельно (при необходимости, как правило, имеется возможность сформировать требуемую расходимость излучения при помощи передающей оптики).
9.3.1. Уравнение лазерной локации при полном вписывании луча в диффузный отражатель
Рассмотрим схему локации на Рис. 23 а), где Тогда, излучение достигшее цели:
здесь Так как телесный угол под которым видна цель, можно приближенно выразить:
то цель рассеивает попавшую на нее энергию в переднюю полуплоскость, причем в направлении визирования распространяется энергия:
Тогда приемная система "стягивает" и направляет на фотоприемное устройство мощность:
где Подставляя полученные выше выражения, получаем:
или
где Таким образом, в случае оптической локации, в большинстве случаев, принимаемая мощность обратно пропорциональна второй степени дистанции (а не четвертой степени, как в СВЧ - локации).
9.3.2. Частичное вписывание излучения в диффузный отражатель
Данная ситуация реализуется или при незначительных габа- ритах отражателя (малоразмерная цель) или на расстояниях пре- дельной видимости. При этом цель отражает энергию:
где Из приведенного выше соотношения видно, что даже в случае неполного вписывания излучения в поверхность цели, принимаемая мощность при лазерной локации по отношению к СВЧ- локации, очень велика, так как в знаменателе присутствует малая величина расходимости лазерного излучения во второй степени.
9.4. Лазерные обзорно-поисковые системы
Лазерные обзорно-поисковые системы - это комплекс устройств, осуществляющих зондирование пространства (заданной области) при помощи лазерного излучения и определяющих координаты оптически контрастных объектов. Посылки зондирующих импульсов и прием отраженных сигналов осуществляются в определенной последовательности зависящей от задач стоящих перед системой. В эти задачи могут входить поиск и обнаружение отдельной цели или слежение за объектом (фиксация изменения его координат), слежение за рельефом поверхности или измерение габаритов объекта и другие задачи. В зависимости от режима обзора пространства системы иногда подразделяют на устройства с последовательным обзором кадра и поэлементным обзором. По принципу реализации развертки излучения системы также разделяются на строчно-кадровые, круговые, со спиральной разверткой и др. В основу реализации всех указанных способов просмотра пространства положены два основных принципа: последовательный опрос элементов матричных фотоприемных устройств и сканирование лазерным лучом (или их совместное использование). Первый принцип, наиболее часто используемый в пассивных или полуактивных системах, поясняет Рис. 24 а. Матрица 1, состоящая из отдельных фотоприемников 2, помещена в фокальной плоскости приемного объектива 3 таким образом, что оптическая ось объектива - 4 проходит через центр матрицы. Тогда на каждый опрашиваемый приемник попадае
Поиск по сайту: |
 , [Вт]
, [Вт] , [Дж]
, [Дж] , [Вт/ср], ср – стерадиан
, [Вт/ср], ср – стерадиан , [Вт/м2]
, [Вт/м2] , [Вт/м2]
, [Вт/м2] , [Вт/ср х м2]
, [Вт/ср х м2] , [Вт/м2 х с]
, [Вт/м2 х с] , I – сила света, отражённая от тела; Ee – освещённость в месте расположения тела
, I – сила света, отражённая от тела; Ee – освещённость в месте расположения тела

 , ρ – коэффициент отражения поверхности.
, ρ – коэффициент отражения поверхности. =1, т.е.
=1, т.е.  = ρ (при условии что поверхность ламбертовская).
= ρ (при условии что поверхность ламбертовская). ,
, .
.
 ,
, - световой поток отражения в переднюю полусферу,
- световой поток отражения в переднюю полусферу,  - поток, падающий на поверхность.
- поток, падающий на поверхность. , где В – яркость, а М – светимость.
, где В – яркость, а М – светимость.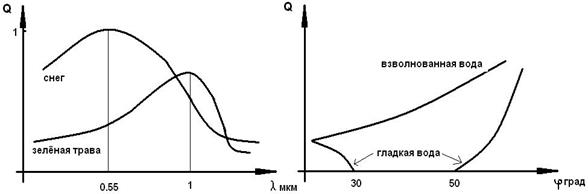
 - освещенность, создаваемая на входном зрачке целью,
- освещенность, создаваемая на входном зрачке целью,  - освещенность фона.
- освещенность фона. .
. , т.е.
, т.е.  , где D – размер УЭ.
, где D – размер УЭ. ,
, ,
, - площадь антенны,
- площадь антенны,  - площадь пр.,
- площадь пр.,  - ____________.
- ____________. , где
, где  - порог чувствительности пр.
- порог чувствительности пр. .
. , где
, где  - диаметр вх. зр.ос, Ј – интенсивность излучения объекта (в области спектральной чувствительности прибора), n – отношение __________, γ – разрешающая способность, Т – время просмотра, N – число ЧЭ пр.,
- диаметр вх. зр.ос, Ј – интенсивность излучения объекта (в области спектральной чувствительности прибора), n – отношение __________, γ – разрешающая способность, Т – время просмотра, N – число ЧЭ пр.,  - обнаруживающая способность пр.
- обнаруживающая способность пр. .
.
 , и для
, и для  .
. , т.к.
, т.к.  ,
, ,
,  ,
,  где
где  - поток от цели.
- поток от цели.
 , для АЧТ
, для АЧТ  .
.
 - мощность лазера,
- мощность лазера,  - длинна трассы,
- длинна трассы,  - длина волны излучения локации
- длина волны излучения локации - коэффициент поглощения,
- коэффициент поглощения,  - коэффициенты молекулярного и аэрозольного рассеяния (отклонения излучения от первоначального направления).
- коэффициенты молекулярного и аэрозольного рассеяния (отклонения излучения от первоначального направления). - упругость насыщенных паров (Па),
- упругость насыщенных паров (Па),  относительную влажность воздуха (%) и толщину поглощающего слоя атмосферы
относительную влажность воздуха (%) и толщину поглощающего слоя атмосферы 
 - число молекул в единице объема,
- число молекул в единице объема,  - показатель
- показатель - фактор деполяризации ( ).
- фактор деполяризации ( ).
 функция распределения частиц по размерам (плотность вероятности найти частицу с размером a).
функция распределения частиц по размерам (плотность вероятности найти частицу с размером a). для случая сферических частиц и однократного рассеяния дает теория Ми:
для случая сферических частиц и однократного рассеяния дает теория Ми:
 - функция Ми,
- функция Ми, 

 - яркость фона,
- яркость фона,  - яркость цели, равен пороговой чувствительности глаза
- яркость цели, равен пороговой чувствительности глаза  .
.
 10 км.
10 км.
 эмпирические коэффициенты для различных видов дымок,
эмпирические коэффициенты для различных видов дымок,
 - расстояния
- расстояния
 - структурная постоянная показателя преломления;
- структурная постоянная показателя преломления;  приведенная высота; h - высота слоя,
приведенная высота; h - высота слоя,  - постоянная.
- постоянная.
 внутренний масштаб турбулентности (соответствует минимальным размерам неоднородностей, обычно 1 - 2 мм);
внутренний масштаб турбулентности (соответствует минимальным размерам неоднородностей, обычно 1 - 2 мм); - внешний масштаб турбулентности (в оптическом диапазоне
- внешний масштаб турбулентности (в оптическом диапазоне  ).
). , вызванные турбулентностью:
, вызванные турбулентностью:
 - диаметр выходного зрачка оптической системы;
- диаметр выходного зрачка оптической системы;
 - относительная интенсивность сигнала.
- относительная интенсивность сигнала.

 - длиной когерентности:
- длиной когерентности:

 :
:
 ,
, - площадь приемного зеркала,
- площадь приемного зеркала,  длительность импульса,
длительность импульса,  -постоянная локатора и коэффициент обратного рассеяния (связанный с коэффициентом рассеяния) -
-постоянная локатора и коэффициент обратного рассеяния (связанный с коэффициентом рассеяния) -  ,соотношением:
,соотношением:
 и обозначая
и обозначая

 , тогда
, тогда
 .
. .
. , диогр. с шириной v
, диогр. с шириной v ,
, ,
, - угловая скорость вращающегося _________ в горизонтальной плоскости
- угловая скорость вращающегося _________ в горизонтальной плоскости - время измерения (частота приемника).
- время измерения (частота приемника).
 . Т.к. этот коэффициент в значительной мере связан с временем возврата системы в исходное положение, он определяет конструктивные особенности системы сканирования (в частности ее быстродействие).
. Т.к. этот коэффициент в значительной мере связан с временем возврата системы в исходное положение, он определяет конструктивные особенности системы сканирования (в частности ее быстродействие). .
. -угловая величина мгновенного поля зрения. Величина поля обзора
-угловая величина мгновенного поля зрения. Величина поля обзора  , скорость движения по спирали
, скорость движения по спирали  , перемещение по радиусу со скоростью
, перемещение по радиусу со скоростью  , шаг спирали равен
, шаг спирали равен  . Коэффициент перекрытия равен
. Коэффициент перекрытия равен  , число витков спирали
, число витков спирали 

 .
. , то
, то  .
. ,
,  .
. , причем должно быть
, причем должно быть  , где τ – постоянная времени приемника.
, где τ – постоянная времени приемника. и скоростью перемещения по радиусу, можно менять вид траектории. Так, если за время одного оборота происходит несколько колебаний по радиусу, то траектория становится розеточной:
и скоростью перемещения по радиусу, можно менять вид траектории. Так, если за время одного оборота происходит несколько колебаний по радиусу, то траектория становится розеточной: . Поле
. Поле  вокруг некой оси, которая вращается со скоростью
вокруг некой оси, которая вращается со скоростью  вокруг неподвижной оси
вокруг неподвижной оси - спиральная,
- спиральная, - розеточная.
- розеточная. , число элементов, расположенных в строке -
, число элементов, расположенных в строке -  . Если время просмотра каждого элемента
. Если время просмотра каждого элемента  - постоянная времени приемника, а число элементов в кадре равно
- постоянная времени приемника, а число элементов в кадре равно  , то время просмотра кадра
, то время просмотра кадра ,
, .
. можно определить угловым положением γ, σ цели. Опрос может проводится поячеечно (ПЗС - матрицы), сканируя эл.-лучом. Обычно цифровой сигнал.
можно определить угловым положением γ, σ цели. Опрос может проводится поячеечно (ПЗС - матрицы), сканируя эл.-лучом. Обычно цифровой сигнал.
 - частота и длина волны модулирующего излучения соответственно,
- частота и длина волны модулирующего излучения соответственно,  - целое и дробное числа полуволн,
- целое и дробное числа полуволн,  - скорость света.
- скорость света. - на приемном устройстве максимум. При его получении можно снять неопределенность измерения дальности проводя измерения на кратных модулирующих частотах.
- на приемном устройстве максимум. При его получении можно снять неопределенность измерения дальности проводя измерения на кратных модулирующих частотах.
 - время задержки между излучением и приемом отраженного импульса.
- время задержки между излучением и приемом отраженного импульса.
 - длительность переднего фронта моноимпульса.
- длительность переднего фронта моноимпульса. - диаметр приемной оптики,
- диаметр приемной оптики,  - расходимость излучения лазера,
- расходимость излучения лазера,  -поле зрения приемной системы,
-поле зрения приемной системы,  - угол между нормалью к цели и направлением визирования.
- угол между нормалью к цели и направлением визирования.
 - ослабление излучения передающей оптикой,
- ослабление излучения передающей оптикой,  (
(  - коэффициент ослабления атмосферы).
- коэффициент ослабления атмосферы).
 - коэффициент отражения цели, при предположении, что цель ламбертовский отражатель.
- коэффициент отражения цели, при предположении, что цель ламбертовский отражатель.
 - ослабление приемной оптической системой,
- ослабление приемной оптической системой,  - ослабление приемо-передающей оптики.
- ослабление приемо-передающей оптики.
 - площадь приемной антены.
- площадь приемной антены.
 -площадь проекции цели на плоскость нормальную к оси визирования,
-площадь проекции цели на плоскость нормальную к оси визирования,