|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Приклад підрахунку об’ємів ґрунту в укосах насипу й виїмки 5 страница
При роботі в забої нормальної ширини екскаватор зазвичай рухається по осі забою (рис. 10.17), а транспортні засоби стоять ззаду|позаду|, біля|біля,в| бічних|боковий| стінок забою. При такій проходці максимальна ширина забою:
де R0| — оптимальний радіус, рівний 0,8–0,9 найбільшого радіуса різання, який допускається конструкцією екскаватора, м|м-код|; ln | — крок пересування екскаватора, м. Величина ln | залежить від місткості|місткість| ковша екскаватора і може бути прийнята згідно з практичними рекомендаціями, наведеними в табл. 10.4. У розширеному лобовому забої екскаватор може рухатися|сунутися| зигзагом (рис. 10.19) — у виїмках, ширина яких не перевищує 2,5Rp |, і упоперек|впоперек| забою (рис. 10.20) — в ширших виїмках (до 3,5 Rp |). При русі екскаватора зигзагом ширина забою по верху:
де |Rст. о = 0,9 Rст , Ширина забою по низу: Вн = Вв – 2тН,| (10.20) т = B/H, де т— коефіцієнт закладення|крутість| укосу; В— закладання укосу; Н— висота укосу, м.
Рис. 10.15. Робоче устаткування для земляних робіт і робочі
При розробці неглибоких|неглибокий| піонерних| траншей і з’їздів у котлован можна застосувати схему вузького лобового забою з вивантаженням ґрунту в транспорт, що пересувається на рівні бровки виїмки (рис. 10.16). В цьому випадку необхідно дотримуватися таких умов|: 1. Rр| > Rвив.| 2.Нн ≥ h + hтр| + 0,8, де Rp| — радіус різання, м|м-код|; Rвив| — радіус вивантаження, м|м-код|; Hн| — висота вивантаження, м|м-код|; h— глибина виїмки, м|м-код|; hтр| — висота транспортних засобів, м|м-код|; 0,8 — запас по висоті, що забезпечує безпеку роботи екскаватора.
3 – центр тяжіння забою; 4 – вісь руху автосамоскида; 5 – вісь руху екскаватора; 6 – віхи;
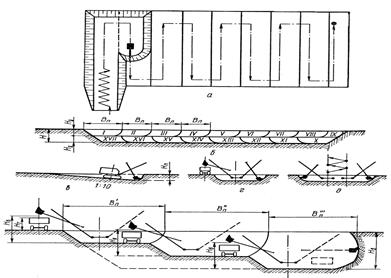
Для з’їздів екскаваторів і транспортних засобів в котлован ухил|уклон,схил|, як правило, не повинен перевищувати 10%, а при спеціальному обґрунтуванні — 15%; ширина проїжджої частини|частка| землевозного| шляху|любий| і пандусів при русі самоскидів вантажопідйомністю до 12 т — не менше 7 м|м-код| при двосторонньому|двобічний| русі і 3,5 м|м-код| — при односторонньому|однобічний|; ширина узбіччя|узбіччя| на цих шляхах з кожного боку — не менше 1 м|м-код|, а на з’їздах і в’їздах — не менше 0,5 м. Піонерні траншеї і з’їзди в котлован рідко розробляються прямою лопатою, зазвичай|звично| цю роботу ефективніше виконувати екскаватором із|із| зворотною лопатою або драглайном. При широких|широкий| виїмках (більше 3,5 R0|) розробка ґрунту виконується в декілька проходів за схемою поздовжнього бічного|боковий| забою . Транспорт проходить|минати,спливати| з боку виробітки паралельно і проти|супроти| напряму|направлення| переміщення екскаватора. Це дозволяє уникнути маневрів у виїмці і максимально скоротити кут|ріг,куток| повороту стріли екскаватора. Транспортні шляхи|колія,дорога| зазвичай|звично| розміщуються на одному рівні з|із| підошвою забою або дещо вище. Влаштування|устрій| шляхів|колія,дорога| нижче за підошву забою недоцільне: 1)|том динамічними ударами падаючого|падати| ґрунту можна пошкодити транспорт; 2) розташовані|схильний| внизу|унизу| шляхи|колія,дорога| неминуче засипаються ґрунтом, що утруднює рух транспорту. За наявності ґрунтових вод, дну забою надається|наділяється,надається| ухил|уклон,схил| (i = 0,003) у бік від забою. Таблиця 10.4 Практичні рекомендації по величині кроку пересування екскаваторів
При розташуванні транспортних шляхів|колія,дорога| і екскаватора на одному рівні ширина бічної|боковий| проходки по низу: Вб = b1 + b2 = Де Rст| — максимальний радіус різання на рівні стоянки, м. При проектуванні забою, крім згаданих умов, потрібно суворо|суворо| дотримуватися правил техніки безпеки в частині|частка| крутизни|крутість| укосів, яка не повинна перевищувати значень, вказаних в СНиП| ІІІ-А.ІІ-70*, с. 79, табл. 4. Крім того, мінімальна висота забою повинна забезпечувати наповнення ковша ґрунтом з|із| шапкою за одне черпання, а максимальна не повинна перевищувати паспортного параметра екскаватора (найбільша висота різання). Робочі параметри екскаваторів, обладнаних прямою лопатою, наведені в додатку 1; 2 [10].
Рис. 10.18. Схема роботи екскаватора з|із| прямою лопатою місткістю ковша|місткість| 0,5 м3| при розробці з’їздів в котлован і вузьких неглибоких|неглибокий| траншей:
Рис. 10.21. Схема роботи екскаватора з|із| прямою лопатою при бічному|боковий| забої: 1 — центр тяжіння забою; 2 — вісь проходки екскавтора; 3 — вісь| попередньої проходки екскаватора; 4 — віха; 5 — вісь руху автосамоскида; 6 — місця|місце-миля| стоянок екскаватора; 7 — середній кут|ріг,куток| повороту стріли; Rр| — радіус різання; Rст| — радіус різання на рівні стоянки; lП| — крок пересування; Rmах| — максимальний радіус різання; В — ширина забою; lМ| — відстань між осями руху екскаватора і автосамоскида
Рис. 10.22. Способи розміщення транспортних засобів при завантаженні ґрунту прямими лопатами:
Рис. 10.23. Розробка прямими лопатами виїмок з великими Екскаватори, що обладнані оберненою лопатою, розробку ґрунту ведуть лобовими (торцевими) і бічними|боковий| забоями. При розробці лобовим забоєм екскаватор може переміщуватися по осі виїмки; вісь руху його може бути дещо зміщена (на величину до половини ширини траншеї по низу) щодо|відносно| осі виїмки і проходити|минати,спливати| паралельно останній; по зигзагу (при ширині лобового забою до Напрям|направлення| черпання ґрунту співпадає|збігатися| з|із| напрямом|направлення| руху екскаватора. При бічному|боковий| забої екскаватор переміщується вздовж|вздовж,уподовж| виїмки, що розробляється, і черпає впоперек|впоперек| осі свого переміщення. Розробка ґрунту зворотною лопатою може бути з|із| навантаженням|навантажування| на транспортні засоби і у відвал на один або два боки. Ширина проходки при лобовому забої і русі екскаватора по прямій
Рис. 10.24. План котлована
Рис. 10.25. Виробництво робіт зворотною лопатою: а – розробка ґрунту в траншеї; б – поздовжня розробка виїмки; При навантаженні|навантажування| вантажу|тягар| на транспорт як в лобовому, так і в бічному|боковий| забої машиніст зміщує вісь робочого переміщення екскаватора у бік підходу транспорту. Автомобілі повинні бути встановлені|установлений| так, щоб під час розвантаження ковша кут|ріг,куток| між віссю стріли екскаватора і поздовжньою віссю автомобіля був не більше 40°|, при цьому кут|ріг,куток| повороту стріли не повинен перевищувати 70°|. При відвантаженні ґрунту у відвал кут|ріг,куток| повороту стріли не повинен бути більше 90°. На рис. 10.26 наведена схема забою при використанні оберненої лопати.
Рис. 10.26.Схема розробки ґгрунту в траншеї екскаватором, обладнаним зворотною лопатою місткістю 0,25 м3|: 1 — вісь проходки екскаватора; Екскаватори-драглайни розробляють котловани чи траншеї боковими чи торцевими |боковий|проходками із завантаженням ґрунту в транспортні засоби чи у відвал, [10] додаток 3. Траншею розробляють торцевим забоєм із переміщенням екскаватора по осі траншеї та укладанням ґрунту у відвал з одного боку при кутах повороту стріли α = 60…90°. Довжина робочого пересування, (м) у всіх випадках має бути не більша як:
де Rз — найбільший радіус копання на рівні дна виїмки; Rз' — найменший радіус копання на рівні дна виїмки, м. Драглайн працює за поперечно-човниковою схемою та поздовжньо-човниковою схемою. Розрахунки параметрів драглайна ведуться як для екскаватора з оберненою лопатою.
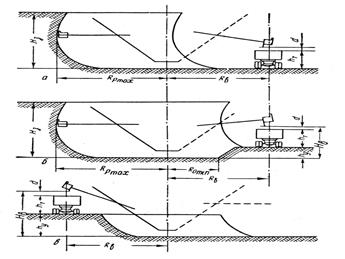
Рис. 10.27.Розробка траншей екскаваторами: а — багатоківшевими ланцюговими екскаваторами; б — розробка ґрунту зворотною лопатою Перевага драглайнів в тому, що можна отримувати широкі і глибокі виїмки з крутими боковими укосами. При цьому драглайн може виконувати невеликий кут повороту стріли, забезпечуючи тим самим найбільшу продуктивність екскаватора. Екскаватор може набирати ґрунт зліва і справа від машини, наповнюючи кузов самоскида, при цьому виконуючи маятникові рухи. Кут повороту стріли не перевищує 30° і ківш, проходячи над кузовом автомобіля, розвантажується не зупиняючись. Найбільшу ширину торцевої проходки по верху в разі переміщення екскаватора по прямій та подачі транспорту з двох боків визначають за формулою:
B=2(Rст. – h ctg φ ), (10.23) де h — глибина котлована; φ — кут укосу. Перевага головних забоїв в тому, що, по-перше, можна отримувати|одержувати| широкі|широкий| і глибокі виїмки з|із| крутими бічними|боковий| укосами; по-друге, невеликий кут|ріг,куток| повороту стріли забезпечує найбільшу продуктивність екскаватора. Перевага бічних|боковий| забоїв полягає в можливості|спроможність| переміщення ґрунту на найбільшу відстань при роботі у відвал і відсипанні насипів|насип| з|із| резервів. Недолік|нестача| їх — менша ширина розробки виїмок, ніж у головному забої. Глибина виїмки не перевищує 0,75 максимальної глибини різання (рис. 10.28).
Таблиця 10.5 Номенклатура екскаваторів на гусеничному та колісному ходу країн світу
Продовження таблиці 10.5
Головний забій має два різновиди: поперечно-човниковий|човниковий| і поздовжньо-човниковий|човниковий|. При першому|перший| транспорт проходить|минати,спливати| по дну виїмки і ставиться під завантаження|навантажування| заднім бортом впритул до грудей забою. При поздовжньо-човниковому|човниковий| способі транспорт також подається на дно виїмки, проте|однак| він трохи не доходить до грудей забою. Ківш набирає ґрунт за задньою стінкою машини і, піднімаючись|підіймаючись| без повороту в горизонтальному напрямі|направлення|, розвантажує його в машину. Здійснюється|скоюється,чиниться| тільки|лише| піднімання і опускання ковша з|із| поздовжнім його переміщенням|переміщення|. Таким чином, при човникових|човниковий| способах за рахунок мінімальних підйомів стріли і невеликих поворотів її значно підвищується продуктивність екскаватора. Розрахунок параметрів забоїв для екскаваторів, обладнаних драглайном, ведеться так само, як і при розробці ґрунту зворотною лопатою. Екскаватори з|із| грейфером розробляють вузькі і глибокі виїмки, крім того, їх використовують на вантажно-розвантажувальних роботах по зворотному засипанні пазух фундаментів|фундамент| (рис. 10.29) і підсипає під підлоги|стать|, коли через обмежені умови інші способи механізації непридатні або малоефективні. Автогрейдери призначені для виконання планувальних і профільних робіт на дорожньому будівництві, а також застосовуються для зачистки зрошувальних канав, кюветів, шляхів від снігу і руйнування дорожнього покриття при ремонті. Вони оснащені відвалами, подовжувачами відвалів, відкрильниками, корковщиками, снігоочищувачами, дорожніми фрезами і розширювачами. За потужністю автогрейдери бувають легкі, середні, тяжкі і особливо тяжкі. Автогрейдери оснащуються механізованим приводом управління робочими органами: механічним, гідравлічним або пневмомеханічним і автоматичним. Найбільш часто використовують наступні типи автогрейдерів: легкі: ДЗ-99 (Д710Б); Д-446; ДЗ-40; Д-598; середні: ДЗ-2А; Д-1444; ДЗ-31-1; Д-557-1; Д-559; тяжкі: Д-394; Д-395А; Д-473; Д-547; ДЗ-98; ДЗ-105. Технічна характеристика автогрейдерів наведена в додатку 4 [10]. Технологія розробки ґрунту і схеми руху автогрейдера аналогічні роботі бульдозера. Продуктивність екскаваторів і шляхи|колія,дорога| її збільшення.Продуктивність екскаваторів вимірюється об’ємом|обсяг| розробленого ґрунту за одиницю часу. Розрізняють чотири її види|вид|: 1) технічна|технічний| Птех (вказується|вказується| в паспорті); 2) експлуатаційна|експлуатаційнийа Пе (продуктивність, що отримана протягом тривалого часу); 3) нормативна Пн (наведена в ДБН); 4) проектна (тобто та, яка закладається|заставляється| в проект виробництва робіт).
Рис. 10.29.Схема роботи екскаватора, обладнаного грейфером Зазвичай|звично| проектна продуктивність на 10–20% вища нормативної. Експлуатаційну|експлуатаційний| продуктивність можна підрахувати|підсумувати| за формулою:
Пе = T 60 q n Kе| Kв (10.24) | де Т— тривалість зміни, год; q— геометрична місткість|місткість| ковша, м3|; п— кількість циклів за хвилину
|мінута|п = 60 / tц| , (10.25) tц| — час одного циклу|, с|із|; Ке— коефіцієнт наповнення ковша ґрунтом в щільному тілі; Кв— коефіцієнт використання змінного часу, величина якого залежить від втрат часу на пересування екскаватора, умов подачі транспортних засобів: заправка|заправляння|, обід тощо. Значення величини Кв наведене в [10] Розглянемо|розгледимо| формулу продуктивності екскаватора з погляду виявлення шляхів|колія,дорога| її підвищення. Т— величина постійна, оскільки|тому що| тривалість зміни постійна, год.; q— місткість ковша, яка залежить від потужності силової установки, м3|. Потужність силової установки розраховується на найбільш важкі|тяжкий| умови роботи машини. Зазвичай|звично| одноківшеві екскаватори призначені для розробки ґрунтів II–IV| груп. При проектуванні екскаватора потужність силової установки підбирається з розрахунку на|розраховуючи на| розробку ґрунту IV групи. При розробці ґрунтів III і II груп в силовій установці звільняється|визволяється| частина|частка| потужності, яку можна використовувати, застосовуючи полегшені ковші більшої місткості. Це дозволяє підвищити продуктивність екскаватора на 15–20%. Враховуючи це, екскаваторні заводи поставляють ковші збільшеної місткості майже для всіх моделей будівельних екскаваторів; п— кількість циклів за хвилину|мінута|. Ця величина змінна, залежна від кута|ріг,куток| повороту стріли і висоти набору ґрунту. Чим менший кут|ріг,куток| повороту і час наповнення ковша, тим більше циклів за хвилину|мінута| він може зробити, а отже, тим вище продуктивність самого екскаватора. Хронометражні спостереження показали, що для екскаваторів з|із| місткістю|місткість| ковша 0,5…1 м3| при куті повороту до 60°| число циклів за хвилину|мінута| приблизно однакове (приблизно 13), а при куті повороту 180°| можна зробити тільки|лише| 3,1 циклу, тобто продуктивність знижується приблизно в чотири рази. Тому необхідно прагнути так організувати роботу екскаватора і подачу транспорту, щоб кут|ріг,куток| повороту ковша був мінімальним. Оптимальним вважається|лічиться| кут|ріг,куток| в 60…70°|. Тривалість циклу можна скоротити, зменшивши шлях|колія,дорога| різання, що досягається збільшенням товщини стружки|стружка|. При цьому різання починають з підошви забою. Ґрунт у верхній частині|частка| забою сповзає до підошви. Якщо ґрунт не обрушується при підкопуванні, забій розробляють частинами|частка|: спочатку нижню|, а потім верхню. М’які ґрунти доцільно розробляти в напрямі|направлення| від місця|місце-миля| завантаження|навантажування| в транспортні засоби. При цьому кожним послідовним|наступний| різанням необхідно|прямувати| дещо перекривати попереднє. Тверді породи краще різати в шаховому порядку|лад|, причому кожне подальше|наступний| різання має бути від попереднього на відстані, меншій ширини ковша. Цільну смугу, що залишилася, зрізають на великій швидкості. Для збільшення продуктивності суміщають|поєднувати| деякі операції в часі. Наприклад, підйом і поворот ковша, розвантаження без зупинки повороту стріли, опускання і поворот ковша. Щоб зменшити налипання ґрунту на стінки ковша, стружку|стружка| беруть тонку і набивають ківш нещільно. Вивантаження проводиться|виробляється,справляється| при повному|цілковитий| вильоті рукоятки і різкому струшуванні ковша. Іноді|інколи| на стінки ковша встановлюють вібратори. Експлуатаційна змінна продуктивність екскаватора м3/зміну можна підрахувати і за іншою формулою:
Поиск по сайту: |
 (10.18)
(10.18) , (10.19)
, (10.19) |Rст. о — оптимальний радіус різання на рівні стоянки.
|Rст. о — оптимальний радіус різання на рівні стоянки.

 Рис. 10.17. Схема виконання земляних робіт екскаватором з прямою лопатою при лобовому забої нормальної ширини:
Рис. 10.17. Схема виконання земляних робіт екскаватором з прямою лопатою при лобовому забої нормальної ширини:  – mH| + 0,7 Rст|. о , (10.21)
– mH| + 0,7 Rст|. о , (10.21)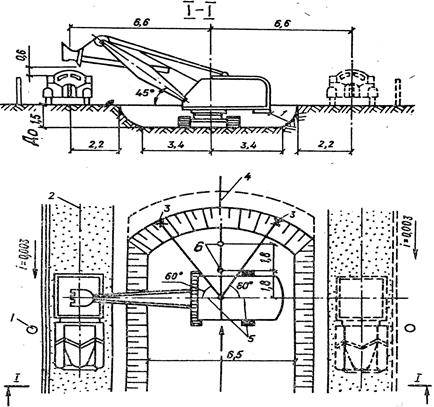







 , (10.22)
, (10.22)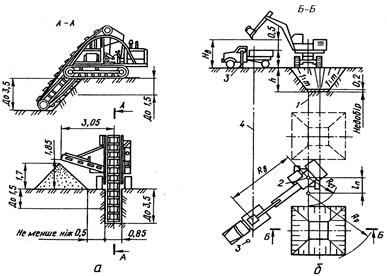


 , (10.26)
, (10.26)