|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Минимальная мощность электропривода
Расчет мощности электропривода выполнен для винтового подъемника плоского скользящего затвора, с червячным редуктором. Как видно из кинематической схемы (рис. 12.3) У этого простейшего подъемника червячное колесо 1 является гайкой грузового винта 2. Необходимо отметить, что расчет мощности электропривода подобных механизмов, несмотря на сравнительную простоту их конструкции, носит весьма приближенный характер. Объясняется это непостоянством и сложностью расчета нагрузки. Изменение нагрузки на затвор, поднимаемый под напором, происходит по сложному закону. Сказываются также гидродинамические явления. Основная составляющая нагрузки — сила трения — является переменной величиной, зависящей от таких факторов, как загрязнение, износ, состояние смазки и т. п. Следует также иметь в виду некоторые перекосы направляющих пазов, значительно увеличивающие подъемные усилия и, очевидно, не поддающиеся расчету. Поэтому приводимый ниже расчет имеет своей целью установить порядок величины коэффициента полезного действия (к. ц. д.) подобного механизма и минимально необходимую мощность его электропривода. Мощность электродвигателя подъемного механизма определяется по формуле: где F — подъемное усилие, кг; V — скорость подъема затвора, равная 0,25 м/мин; ηоб — общий к. п. д. подъемника.
где k — коэффициент запаса, равный 1,5; G— вес затвора, кг; В — ширина затвора, равная 1,25 м, Н — высота затвора, равная 1,25 м; f — коэффициент трения для стали по стали без смазки, вводе с учетом загрязнения равный 0,5.
Подъемное усилие в 1 т обычно является минимальным расчетным усилием при конструировании унифицированных подъемников. Мощность, необходимая для подъема затвора:
Определим общий к. п. д. подъемного механизма: а) крутящий момент на винте с учетом трения в резьбе винт-гайка:
где α — угол подъема винтовой линии резьбы винта, определяемый по формуле:
t — шаг винта; Rср — средний радиус резьбы, равный для рассматриваемого случая ρ — угол трения в резьбе; при коэффициенте трения в резьбе fр = 0,15 ρ = 8°30'.
Следовательно, Мр = 1000*0,0185*tg(2°56' + 8°30') = 3,76 кгм; б) момент трения в опорном подшипнике:
где Rn — радиус трения опорного подшипника; принимаем его равным 77,5 мм, что соответствует радиусу опорного подшипника № 8212 с внутренним размером 60 мм; fп — коэффициент трения в подшипнике, принимаемый равным 0,005. Мn = 1000*0.0775*0.005 =0.388 кгм. Общий момент на червячной паре: Мк = Мр + Мn = 3,76 + 0,388 = 4,148 кгм. Для обеспечения такого момента необходима мощность:
где nк—.число оборотов гайки, равное числу оборотов червячной шестерни. При скорости подъема затвора, равной 0,25 м/мин, и размере резьбы винта 40*6 мм число оборотов червячного колеса равно:
Отсюда в) коэффициент полезного действия червячной пары:
где β — угол подъема винта на червяке, равный 4°46' для однозаходного червяка с d =12; ρ'=2°30' — приведенный угол трения стали по бронзе, соответствующий коэффициенту трения f = tg ρ' = tg2°30' = 0,6435; η = 0,97 — коэффициент, учитывающий потери на трение в опорах червячной передачи в размере 3% от величины передаваемой мощности;
Мощность, которая должна быть подведена к 'подъемнику, с учетом к.п.д. червячного редуктора:
г) общий к.п.д. винтового подъемника механизма в целом:
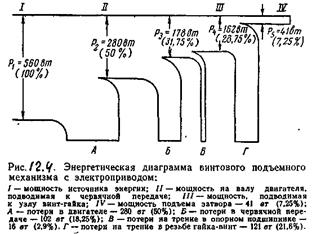
На рисунке 12.4 приведена энергетическая диаграмма, на которой, согласно приведенному расчету, дано распределение потерь в отдельных звеньях механизма. Из диаграммы следует, что коэффициент полезного действия подобного подъемного механизма чрезвычайно мал. Около 80% подведенной мощности теряется в винтовом подъемнике и червячном редукторе. Следовательно, без коренных изменений данной конструкции существенно снизить потребную мощность не представляется возможным. Минимальная мощность асинхронного короткозамкнутого электродвигателя, которая может быть выбрана для рассматриваемого подъемника (учитывая номенклатуру электродвигателей), Р2 = 0,4 квт. Уже при, такой мощности электродвигателя централизованное электроснабжение гидротехнических сооружений оросительных систем осуществляется напряжением 6 — 10 кв.
Следовательно, на основании выполненного расчета может быть сделан такой вывод. Плоские затворы с винтовыми подъемными механизмами в их современном конструктивном исполнении обусловливают, как правило, осуществление высоковольтного варианта электроснабжения, что, как показано в главе второй, в большой степени удорожает и усложняет автоматизированный затвор. Кроме того, собственно плоский затвор не обладает водомерностью, и для измерения пропускаемого им расхода с передачей показаний на диспетчерский пункт необходим специальный гидравлический элемент и первичный измерительный прибор что также влияет на объем работ и общую стоимость одного автоматизированного гидротехнического сооружения с плоским затвором. Поэтому применение небольших плоских затворов на вновь сооружаемых автоматизированных системах является спорным. Приведенные ниже конструкции затворов, созданных с учетом требований автоматизации, подтверждают технико-экономическую 'целесообразность разработки новых типов затворов,. Однако пока найдены лишь частные решения для замены небольших плоских затворов, которые, кроме того, установлены на всех действующих системах, и их массовая замена не целесообразна. Поэтому в ближайшие годы, очевидно, плоский затвор будет наиболее распространен на оросительных системах.
Выбор электропривода Электроприводом винтовых подъемных механизмов служит трехфазный асинхронный короткозамкнутый двигатель. К его достоинствам относятся простота и надежность конструкции, минимальная из всех типов двигателей стоимость, элементарный уход и низкая стоимость эксплуатации. По условиям работы и конструктивным особенностям наиболее подходят для приводов механизмов затворов крановые двигатели; поэтому во всех случаях, когда представляется возможным, рекомендуется выбирать этот тип. Однако применяются и асинхронные двигатели общепромышленной единой серии, хотя это менее целесообразно. Опыт установки электрифицированных подъемных механизмов для плоских скользящих затворов (на Нижне-Донской оросительной системе и др.) с подъемными усилиями 1—2 т показал, что фактическая потребная мощность электропривода зачастую выше полученной по расчету. Объясняется это, по-видимому, в первую очередь недостаточно тщательным выполнением строительно-монтажных работ на этих сооружениях, из-за чего возникают перекосы пазов. Кроме того, в пазы набивается мусор, что создает дополнительные, по сравнению с расчетными, усилия на подъемные механизмы. Таким образом, автоматизация управления предъявляет более высокие требования к качеству строительства гидротехнического сооружения Следует обеспечивать вертикальность направляющих пазов, правильность установки закладных частей и подъемных механизмов. Наряду с этим, очевидно, необходимо считаться с трудностью тщательного выполнения строительно-монтажных работ на массовых мелких сооружениях, и для компенсации возможных погрешностей монтажа следует мощность электродвигателя для небольших сооружений принимать примерно в два раза больше расчетной. При выборе электродвигателя нужно выдерживать определенное соотношение между максимальным моментом двигателя и расчетной нагрузкой. Выбор двигателя с моментом, значительно большим, чем это определяется нагрузкой, может вызвать необходимость в повышении прочности механизма. Обычно эта прочность проверяется по нагрузке, соответствующей максимальному моменту двигателя. Если отношение между максимальным моментом и номинальной нагрузкой не превышает 1:2,5, то это соответствует обычным запасам прочности, принятым для конструирования подъемных механизмов. Двигатель с заниженным моментом может не обеспечить надежную работу затвора Соотношение между максимальным моментом двигателя и расчетной нагрузкой определяется по формуле:
где Мст — максимальный статический момент нагрузки. Формула получена на основании следующих соображений: припуске электродвигателя допускается снижение напряжения до 85% номинального. При этом максимальный момент, пропорциональный квадрату напряжения, снижается до 72%. В этих условиях максимальный момент должен превышать максимально возможный - момент статической нагрузки на 30—40% для того, чтобы обеспечить уверенный разгон механизма. Таким образом, минимальное отношение максимального момента двигателя к максимальному моменту статической нагрузки находится в пределах 1,95. Фактически это отношение лежит в пределах 1,95—2,9. Верхний предел определяется номенклатурой двигателей, для которых шкала мощностей имеет обычно шаг 1,3-1,5. Для двигателей, у которых пусковой момент значительно ниже максимального, выведенное соотношение следует относить к их пусковому, а не к максимальному моменту Особенно это относится к короткозамкнутым двигателям общепромышленных серий, для которых пусковой момент обычно ниже максимального.
Поиск по сайту: |
 Большой интерес представляет минимально потребная мощность электродвигателя подъемника для наиболее массовых затворов оросительных систем — с пропускной способностью до 2 м3/сек. Как было показано в главе второй, именно эта мощность определяет схему электроснабжения и схему комплексной автоматизации в целом.
Большой интерес представляет минимально потребная мощность электродвигателя подъемника для наиболее массовых затворов оросительных систем — с пропускной способностью до 2 м3/сек. Как было показано в главе второй, именно эта мощность определяет схему электроснабжения и схему комплексной автоматизации в целом. вт
вт
 кг.
кг. вт
вт

 мм. Резьбу винта принимаем прямоугольной с диаметром 40 мм и шагом t = 6 мм (такая резьба применена в винтовых подъемниках, установленных на сооружениях Нижне-Донского канала в Ростовской области);
мм. Резьбу винта принимаем прямоугольной с диаметром 40 мм и шагом t = 6 мм (такая резьба применена в винтовых подъемниках, установленных на сооружениях Нижне-Донского канала в Ростовской области); ;
; 
 ,
, вт,
вт, об/мин,
об/мин, Вт
Вт

 вт
вт