|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Электрические исполнительные механизмы.
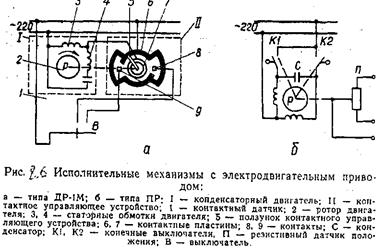
Исполнительные механизмы автоматических устройств предназначены для силового воздействия на регулирующие органы объектов управления. Они классифицируются по виду используемой энергии: электрические, гидравлические и пневматические. В мелиорации обычно применяют электрические и гидравлические механизмы. По характеру воздействия на регулирующий орган различают двухпозиционный, многопозиционные и пропорциональные исполнительные механизмы. Двухпозиционные выполняют простейшие операции (например, открыть — закрыть), многопозиционные — ступенчатое, пропорциональное и плавное регулирование Электрические исполнительные механизмы выполняются с электромагнитным (соленоидным) и электродвигательным приводом. Исполнительные механизмы с электромагнитным приводом обеспечивают поступательное перемещение регулирующих органов. Они применяются главным образом в электромагнитных клапанах и вентилях для двухпозиционного регулирования. Чтобы открыть клапан и вентиль, питание подают на катушку электромагниту которая втягивает сердечник, связанный с запорным органом вентиля. Закрытие вентиля происходит под действием пружины при отключении катушки электромагнита. Для снижения потребления электроэнергии эти механизмы оснащаются механическими защелками, удерживающими сердечник при открытом вентиле и отключении питания катушки. Закрытие происходит за счет подачи импульса тока в маломощную катушку электромагнита освобождения защелки. В электродвигательных исполнительных механизмах для привода используются одно- и двухфазные двигатели переменного тока, асинхронные трехфазные, синхронные, двигатели постоянного тока и сельсины. На рисунке приведена схема двухпозиционного исполнительного механизма с электродвигательным приводом типа ДР-1М, который состоит из конденсаторного двигателя I и контактного управляющего устройства II. Двигатель имеет две статорные обмотки 3 и 4. В одну из них включен конденсатор для смещения фазы протекаемого тока и получения вращающегося магнитного поля. С валом ротора 2 кинематически связан ползунок 5 контактного управляющего устройства. В исходном положении ползунок находится на одном из контактов 8 или 9, выступающих над контактной пластиной 6. Когда ползунок размещен на контакте 8 и замыкается вверх контакт датчика 1, управляющего исполнительным механизмом, получают питание обмотки двигателя и он начинает вращаться. Ползунок сходит с контакта 8 на пластину 6, но цепь питания двигателя остается замкнутой за счет перемыкания ползунком пластин 6 и 7. Сделав полоборота, ползунок окажется на контакте 9 и двигатель остановится. При переключении контакта датчика 1 вниз, двигатель вновь получает питание и вращаясь, переместит ползунок на полоборота до размещения на контакте 8. Двигатель всегда вращается в одном направлении, а направление движения регулирующего органа изменяется за счет внешних кинематических связей между исполнительным механизмом и регулирующим органом.
Механизм ДР-М отличается от механизма ДР-1М возможностью сочленения с регулирующим органом не только с помощью диска, совершающего вращательное движение, но и штоком, перемещающимся поступательно. В системах пропорционального регулирования применяют исполнительные механизмы ПР-1М, ПР-М и МЭО. Для привода используются конденсаторные двигатели, но в отличие от механизмов ДР предусмотрена возможность реверсирования. Реверсирование происходит за счет переключения конденсатора С из одной цепи обмотки двигателя в другую конечными выключателями К1 и К2 Для дистанционного контроля положения и устройства обратной связи механизмы оснащаются блоками с индуктивными, резистивными датчиками и микропереключателями положения. Исполнительные механизмы ПР, ДР и МЭО широко используются для привода поворотных дисковых затворов. В качестве привода задвижек и затворов перегораживающих сооружений применяются многооборотные электрические исполнительные механизмы.
2. Технические характеристики двигателей исполнительных механизмов М, А, Б, В, Г, Д
В мелиоративной практике наиболее распространены унифицированные исполнительные механизмы типов М, А, Б, В, Г, Д, Они принципиально однотипны и отличаются по габаритам, мощности двигателя и несущественными конструктивными изменениями. Как приводные двигатели в механизмах используют асинхронные трехфазные двигатели с повышенным скольжением и фланцевым креплением. Двигатель связан с запорным органом задвижки червячным редуктором (в механизмах М и А цилиндрическим). Механизм имеет стрелку местного указателя положения, кинематически связанную с приводным валом, и потенциометр дистанционного указателя. Защищается механизм от перегрузок муфтой ограничения крутящего момента или реле максимального тока. Предусматриваются штурвал ручного привода и механическая блокировка, которая при включении ручного привода отсоединяет вал двигателя от вала червячного редуктора, и напротив, при сочленении двигателя с редуктором расщепляется его кинематическая связь со штурвалом ручного привода. Электрические исполнительные механизмы также применяют для привода плоских щитовых затворов перегораживающих сооружены. Промышленностью серийно выпускаются винтовые подъемники типа В-73 с асинхронным трехфазным приводом. Двигатели соединяются через редуктор с грузовыми гайками привода грузовых подъемных винтов с трапецеидальной резьбой. Для местного отсчета и дистанционных измерений установлены датчики положения затвора. В подъемниках предусмотрена рукоятка ручного подъема. Техническая характеристика приводных двигателей винтовых подъемников приведена в таблице 3.
3. Техническая характеристика приводных двигателей винтовых подъемников В-73
Рис. 8.7. Регулятор уровня с мембранным исполнительным механизмом:
1 — выпускная труба; 2 — рабочая камера; 3 — мембрана; 4 — рабочий клапан; 5 — дроссельная трубка; 6 — входная дроссельная трубка; 7 — гибкая трубка; 8 — поплавковая камера; 9 — поплавок.
8.4. Гидравлические исполнительные механизмы.
Из гидравлических исполнительных механизмов наиболее распространены поршневые и мембранные устройства. Поршневой исполнительный механизм применяется, например, для дистанционного и автоматического регулирования положением крана-задатчика скорости дождевальной машины «Фрегат». В качестве рабочей жидкости используется вода, поступающая непосредственно от трубопровода машины. В мембранных исполнительных механизмах, используемых в мелиорации, рабочей средой является вода. Такие механизмы применяются для привода затворов, а также в гидравлических регуляторах На рисунке показана схема гидравлического регулятора уровня с мембранным исполнительным механизмом, разработанная УкрНИИГиМ. Уровень воды регулируется за счет изменения подачи через впускную трубу 1. Вода, поступающая снизу, выливается в резервуар через кольцевую щель между верхним концом трубы и рабочим клапаном 4. Он соединен с гибкой мембраной 3. Одновременно вода поступает в дроссельную трубку 5. При низком уровне в резервуаре поплавок 9, находящийся в поплавковой камере 8, опускается вниз и открывает сливное отверстие гибкой трубки 7. Вода из дроссельной трубки сливается в резервуар. В результате под давлением воды снизу он поднимается, увеличивая кольцевую щель и поступление воды в резервуар возрастает. При повышении уровня поплавок 9 перекрывает сливное отверстие трубки и вода заполняет рабочую камеру 2. За счет большой площади, на которую воздействует давление воды сверху, мембрана 3 прогибается вниз и рабочий клапан 4 прикрывает выход из трубы 1. Как видно, в регуляторе конструктивно совмещены исполнительный механизм и регулирующий орган. Достоинством регулятора является отсутствие постороннего источника энергии, так как исполнительный механизм работает за счет энергии регулируемого водяного потока.
Контрольные вопросы к теме 8. 1. Электромагнитные реле, их устройство. 2. Реле выдержки времени – где его применяют? 3. Электрические исполнительные механизмы – как они устроены? 4. Электродвигательные исполнительные механизмы – как они устроены? 5. Гидравлические исполнительные механизмы – где они применяются?
ТЕМА 9. ЭЛЕКТРОПРИВОДЫ В СИСТЕМАХ АВТОМАТИЗАЦИИ.
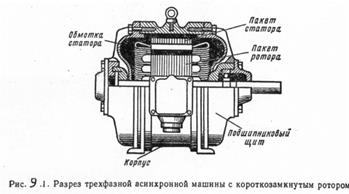
9.1. Устройство трехфазных асинхронных машин
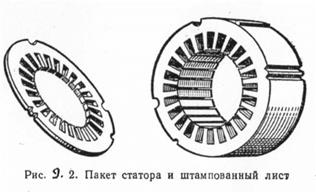
Трехфазные асинхронные машины впервые были разработаны в конце 80-х и в начале 90-х годов XIX в. выдающимся русским электротехником М. О. Доливо-Добровольским, который создал несколько типов этих машин. Статоры у них устроены одинаково и отличаются эти машины друг от друга лишь конструкцией ротора. Конструктивные элементы статора Основными частями статора являются неподвижный пакет магнитопровода и трехфазная обмотка (рис. 9.1). Пакет магнитопровода изготовлен в виде полого цилиндра, набранного, так же как и магнитопровод трансформатора, из тонких листов электротехнической стали (рис. 9.2). Листы имеют форму колец с пазами, симметрично расположенными вдоль внутренней окружности. В пазы пакета ста тора уложены стороны многовитковых мягких катушек, образующих три фазы обмотки. Пакет статора с обмоткой запрессован в алюминиевый или чугунный корпус-оболочку, неподвижно закрепляемый при установке машины на фундаментной плите. С корпусом прочно соединены два боковых литых щита со сквозными центральными отверстиями для подшипников, в которых вращается вал ротора.
Начала и концы фаз обмотки статора присоединены к зажимам, расположенным в коробке выводов, укрепленной на корпусе. Большинство машин имеет коробку выводов с шестью зажимами, что позволяет соединять фазы обмотки треугольником или звездой. Обмотку статора таких машин можно включать либо в сеть с линейным напряжением, равным номинальному напряжению на фазе обмотки, либо в сеть с напряжением, превышающим в Часть трехфазных асинхронных машин снабжена коробкой выводов с тремя зажимами. Соответствующие соединения фаз обмотки статора сделаны внутри этих машин. Они рассчитаны на включение обмотки в сеть с линейным напряжением, указанным в качестве номинального на паспортном щитке. Конструктивные элементы ротора Роторы трехфазных асинхронных машин состоят из пакета магнитопровода цилиндрической формы, набранного из тонких стальных дисков с пазами, и обмотки, расположенной в этих пазах. Пакет магнитопровода с обмоткой насажен на вал. Пакет ротора отделен от пакета статора небольшим равномерным зазором. Различают два типа обмоток ротора. Первый тип обмоток был разработан М. О. Доливо-Добровольским в 1889 г. Он предложил в пазы пакета ротора вставлять медные стержни, лишенные изоляции, а все концы стержней на обоих торцах пакета замыкать накоротко при помощи двух медных колец (рис. 9.3, а). Такие медные стержни и кольца применяют в современных асинхронных машинах мощностью более 100 кВт (рис. 9.3, б). В менее мощных машинах стержни изготовляют прямой заливкой пазов роторов расплавленным алюминием. Заодно со стержнями на обоих торцах пакета отливают кольца, а также вентиляционные лопасти (рис. 3.3, в).
Обмотку ротора в виде жесткой системы стержней с кольцами автор назвал «беличьей клеткой». Так как «беличья клетка» не имеет каких-либо соединений с внешней сетью и представляет собой короткозамкнутую систему проводников, ротор с этим типом обмотки принято называть короткозамкнутым. Трехфазные асинхронные машины с короткозамкнутым ротором являются основной продукцией электромашиностроительных заводов. Поэтому их относят к типу машин основного исполнения. На электрических схемах трехфазные асинхронные машины основного исполнения обозначают стандартным символом, приведенным на рис. 9.3 г. Второй тип обмоток был разработан М. О. Доливо-Добровольским в 1890 г. Он предложил в пазы пакета ротора укладывать такую же катушечную трехфазную обмотку, какая уложена на статоре; фазы обмотки соединять звездой и три свободных ее конца присоединять к трем медным контактным кольцам, насаженным на вал и изолированным как от него, так и друг от друга (рис. 9.4, а); на боковом подшипниковом щите укреплять щеткодержатель, причем так, чтобы расположенные в нем три группы угольных щеток надежно соприкасались с контактными кольцами ротора. Ротор с катушечной трехфазной обмоткой и контактными кольцами называют фазным.
Машины с контактными кольцами допускают включение реостатов или дросселей в цепи роторов, чем обеспечивается возможность улучшения их пусковых и регулировочных свойств. Однако они дороже и менее надежны, чем машины основного исполнения; область их применения ограничена теми особыми случаями, когда поставленные задачи не могут быть разрешены применением машин с короткозамкнутым ротором. На электромашиностроительных заводах трехфазные асинхронные машины с контактными кольцами считают машинами, имеющими специализированное исполнение. Условное графическое обозначение таких машин на электрических схемах приведено на рис. 9.4, б. 9.2.Вращающееся двухполюсное поле
При работе машины в ее магнитопроводе и около боковых частей обмоток с переменными токами возбуждается изменяющееся магнитное поле. Если построить картину его линий, то можно обнаружить, что большинство их сцеплено как с проводниками обмотки статора, так и со стержнями обмотки ротора. Часть поля, образованного такими линиями, называют основным магнитным полем. Остальные магнитные линии сцеплены либо только с обмоткой статора, либо только с обмоткой ротора. Подобно трансформатору эти части поля будем называть соответственно полями рассеяния статора и ротора. Общее представление об особенностях основного поля трехфазной асинхронной машины можно получить из рассмотрения ее картины, схематически изображенной в поперечном разрезе на рис. 9.5. Здесь не показана обмотка ротора, а каждая фаза обмотки статора представлена только одной многовитковой катушкой, стороны которой уложены в два диаметрально противоположных паза. Начала и концы катушек обозначены соответственно буквами а, в, с, и х, у, z. Плоскости и магнитные оси витков (нормаль к плоскости витка ,восстановленная посередине между его сторонами и направленная вдоль магнитных линий поля, возбужденного положительным током витка) катушек расположены под углами 120º друг к другу. Если на катушки подать трехфазную симметричную систему напряжений, то в них установятся синусоидальные токи ia, ib и ic, график которых представлен на рис. 9.5, а. Условимся считать ток в любой катушке положительным, когда он направлен от начала к ее концу, и отрицательным — при обратном направлении. Каждая катушка с током создает переменное магнитное поле. Три переменных магнитных поля, складываясь, образуют результирующее магнитное поле. Картина результирующего поля непрерывно изменяется, но ее можно построить для любого момента времени. Построим картину результирующего поля для момента времени (см. рис. 9.5, а), когда ток в первой катушке (фазе) положителен и максимален. Направление тока ia в сторонах катушки а — х условно обозначено в сечении витка точкой и крестиком (рис. 9.5, б). Из графика тока можно заключить, что в рассматриваемый момент времени токи во второй и третьей катушках отрицательны, т. е. направлены от концов катушек к их началам. Зная направления токов в сторонах катушек, можно построить приближенную картину результирующего поля, руководствуясь правилом правоходового винта. В левой половине статора магнитные линии направлены из стали в воздух, а правой половине — из воздуха в сталь. Следовательно, в рассматриваемый момент времени левая половина внутренней поверхности магнитопровода статора представляет собой северный полюс, а правая — южный полюс. Ось полюсов (или ось симметрии магнитного поля) занимает в выбранный момент времени горизонтальное положение и совпадает с магнитной осью первой катушки. Теперь выберем момент времени t2 когда ток во второй катушке будет положительным и максимальным, а токи в первой и третьей катушках — отрицательными. Путем тех же рассуждений можно построить приближенную картину результирующего поля, показанную на рис. 9.5, в. Из нее видно, что ось симметрии магнитного поля занимает новое положение в пространстве, совпадая с магнитной осью второй катушки. Наконец, если построить картину результирующего поля для момента времени t3 (рис. 9.5, г), когда ток в третьей катушке (фазе) будет положительным и максимальным, то можно установить, что положение магнитных полюсов в пространстве опять будет иным.
Ось симметрии результирующего магнитного поля располагается по оси той фазы, ток в которой максимален. Картины результирующего поля, построенные на рис. 9.5 для различных моментов времени, показывают, что конфигурация линий магнитного поля по мере изменения токов в неподвижных катушках не изменяется; происходит лишь равномерное одностороннее вращение вокруг оси машины (например, по движению часовой стрелки) всего спектра магнитных линий поля, а следовательно, и вращение оси их симметрии. Такое поле принято называть вращающимся. Если изменить порядок чередования токов в катушках обмотки статора на обратный, например, принять, что ток t'e является током катушки с — z, а ток ic создан в катушке b — у, то результирующее магнитное поле будет вращаться против движения часовой стрелки. Таким образом, направление вращения магнитного поля определяется порядком чередования токов в фазах обмотки статора: поле поворачивается в сторону фазы с отстающим током. Из рассмотрения картин поля, изображенных на рис. 9.5, также следует, что трехфазная симметричная система токов возбуждает в магнитной системе машины поле с одной парой полюсов, если каждая фаза обмотки статора образована одной катушкой. Определим скорость вращения двухполюсного поля. Его ось симметрии поворачивается на 360°, т. е.совершает один оборот за время Т0, равное периоду Т изменения тока. Следовательно, частота вращения ν 0 двухполюсного поля как величина, обратная периоду Т0 вращения и выраженная числом оборотов в секунду, численно равна частоте f1 токов в обмотке статора. По исторически сложившейся традиции частоту вращения принято выражать числом оборотов n0 в минуту. Для двухполюсного поля n0 = 60ν0 = 60f1 Учитывая, что υ0 = f1 найдем угловую скорость вращения двухполюсного поля: Ω0 = 2π ν 0 = 2π f1 = ω1 [рад/с]. Таким образом, угловая скорость вращения основного двухполюсного магнитного поля численно равна угловой частоте токов в обмотке статора.
9.3. Вращающееся многополюсное поле
Токи в трехфазной обмотке могут возбуждать не только двухполюсное, но и многополюсное вращающееся магнитное поле. Для этого количество катушек в фазе увеличивают в число раз, равное требуемому числу пар полюсов р магнитного поля, а размеры катушек — уменьшают во столько же раз. Например, для создания поля с двумя парами полюсов (р = 2) в каждую фазу обмотки статора включают по две катушки (рис. 9.6, а), а их угловые размеры (по сравнению с катушками двухполюсной обмотки рис. 9.5) уменьшают в два раза, т. е. стороны витков укладывают в пазы, расположенные под углом 180/2 = 90° (рис. 9.6, б), а оси катушек разных фаз располагают под углами 120/2 == 60°. Скорость вращения магнитного поля, образующего две пары полюсов, будет в два раза меньше, чем скорость вращения двухполюсного поля, так как за один период изменения токов полюсы поворачиваются на пространственный угол, равный 180°. В справедливости этого можно убедиться путем построения картин поля, аналогичных рассмотренным выше (см. рис. 9.5). Если в зазоре машины будет возбуждено шестиполюсное магнитное поле, то за один период изменения токов в катушках статора ось поля повернется на угол 120°, при восьми полюсном магнитном поле — на 90 и т. д. Иначе говоря, при неизменной частоте токов в катушках фаз обмоток статора многополюсное магнитное поле вращается в пространстве медленнее двухполюсного в число раз, равное числу пар полюсов.
Поэтому угловая скорость вращения многополюсного магнитного поля относительно обмотки статора, называемая синхронной скоростью, может быть выражена формулой
Соответственно частота вращения многополюсного поля меньше частоты вращения двухполюсного поля в число раз, равное количеству пар полюсов:
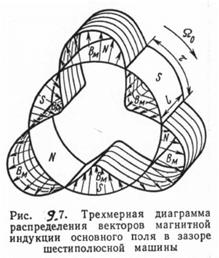
Во всех машинах переменного тока стремятся обеспечить пространственное распределение магнитной индукции поля вдоль воздушного зазора между статором и ротором по закону, близкому к синусоидальному, с тем, чтобы ослабить вредное влияние высших гармонических составляющих поля и токов на энергетические показатели работы и механические свойства машин. Желательное распределение получают укладкой сторон витков катушек обмотки в несколько рядом лежащих пазов. Для этого каждую многовитковую катушку обмотки разделяют на соответствующее число секций. Пространственное распределение векторов магнитной индукции вращающегося магнитного поля в воздушном зазоре машины можно представить трехмерной диаграммой, изображенной на рис. 9.7 для шестиполюсной машины (р = 3); эту диаграмму следует представить себе вращающейся по окружности воздушного зазора с синхронной скоростью. Вращающееся магнитное поле машины количественно характеризуют потоком Ф вектора магнитной индукции В через поверхность полюсного деления с площадью τl. Этот поток называют потоком полюса. Для определения величины потока полюса пользуются средним значением Вср магнитной индукции по площади полюсного деления: Ф = Всрτ1. При синусоидальном распределении магнитной индукции с амплитудным значением Вт, когда ее среднее значение Вср = 2Вт/π, величину потока полюса определяют соотношением
Отметим, что в трехфазной асинхронной машине, включенной в сеть с симметричной трехфазной системой напряжений, величина потока полюса вращающегося магнитного поля сохраняется неизменной при любом положении оси поля.
Поля рассеяния Общее представление об особенностях полей рассеяния можно получить из рассмотрения рис. 9.8, где схематично изображены линии поля машины, сцепленные лишь с одной катушкой обмотки статора. Подобную картину имеют и остальные линии поля рассеяния статора, а также линии поля рассеяния ротора. Вблизи отогнутых головок катушек или торцовых колец короткозамкнутой обмотки они целиком находятся в воздухе; вдоль сторон катушек, расположенных в пазах — частично в стали, а частично в воздухе между зубцами магнитопровода. Если учесть, что магнитные напряжения ферромагнитных участков магнитных линий полей рассеяния пренебрежимо малы по сравнению с магнитным напряжением участков этих линий в воздухе, то можно заключить, что практически вся энергия поля рассеяния будет сосредоточена в магнитно-нейтральной среде. В отличие от основного вращающегося поля машины магнитные поля рассеяния не участвуют в процессе передачи электромагнитной энергии между статором и ротором, а их интенсивность незначительна. Величины потокосцеплений Ψ1σt и Ψ2σt полей рассеяния обмоток статора и ротора можно cчитать прямо пропорциональными мгновенным значениям токов в обмотках: Ψ1σt = L1σi1 и Ψ2σt = L2σi2, где = L1σ и L2σ — индуктивности рассеяния фаз обмоток статора и ротора, принятые в качестве неизменных параметров обмоток машины. Такое упрощение допустимо для полей рассеяния трехфазных асинхронных машин основного исполнения и для машин с фазным ротором.
В дальнейшем будет показано, что хотя поля рассеяния обмоток являются слабыми по сравнению с основным полем, однако пренебрегать ими нельзя, так как они оказывают значительное влияние на рабочие свойства машины.
9.4. Режимы работы трехфазной асинхронной машины
Трехфазная асинхронная машина может работать в трех режимах: двигателя, генератора и электромагнитного тормоза. Для уяснения принципов действия асинхронной машины, работающей в этих режимах, рассмотрим физические явления, возникающие в ней после включения обмотки статора в трехфазную сеть.
Пусть машина имеет короткозамкнутый ротор и двухполюсную обмотку статора, а трехфазная система токов возбуждает в магнитопроводе статора и ротора магнитное поле, вращающееся с синхронной скоростью Ω0 в направлении движения часовой стрелки (рис. 9.9, а). Допустим также, что электрическое (активное) сопротивление стержней «беличьей клетки» велико. Тогда при неподвижном роторе в проводниках его обмотки вследствие пересечения их линиями вращающегося поля наведутся э.д.с. и в короткозамкнутой обмотке ротора установятся переменные токи, практически совпадающие по фазе с э.д.с. Так как проводники с токами ротора находятся в магнитном поле машины, то на них будут действовать механические силы. Направления э.д.с. и создаваемых ими токов в короткозамкнутых проводниках ротора, а также электромагнитных сил, действующих на ротор, могут быть определены соответственно по правилам правой и левой руки. Следует только учесть направление относительного движения проводников ротора в магнитном поле; в рассматриваемом случае оно противоположно движению поля. Применив эти правила, найдем, что электромагнитные силы, приложенные к неподвижному ротору, создают пусковой момент, стремящийся повернуть ротор в направлении движения магнитного поля. Если электромагнитный момент, действующий на неподвижный ротор, превысит тормозной момент на его валу, то ротор получит ускоренное движение в направлении вращения магнитного поля машины. По мере возрастания скорости вращения Ω ротора скорость Ω0 – Ω относительного движения его проводников в равномерно вращающемся магнитном поле уменьшится, вследствие чего уменьшатся величины э.д.с. и тока в них, что повлечет за собой соответствующее изменение вращающего момента. Процессы изменения тока, момента и скорости вращения ротора прекратятся, как только наступит устойчивое равновесие между электромагнитным моментом, вызывающим вращение ротора, и тормозным моментом (моментом сопротивления), создаваемым устройством, приводимым в движение электрической машиной. В этих условиях ротор машины будет вращаться с постоянной скоростью Ω и в его короткозамкнутых контурах установятся токи, обеспечивающие создание вращающего момента, равного тормозному. Таким образом, принцип работы асинхронных двигателей основан на взаимодействии вращающегося магнитного поля с токами, которые наводятся этим полем в проводниках ротора. Очевидно, что возникновение токов в роторе и создание вращающего момента возможны лишь при относительном движении проводников ротора в магнитном поле машины. Из этого следует важный вывод о том, что ротор и магнитное поле асинхронной машины, работающей в режиме электрического двигателя, вращаются в пространстве в одном направлении, но с разными скоростями; скорость вращения ротора двигателя всегда меньше скорости вращения магнитного поля. С увеличением тормозного момента скорость вращения ротора уменьшается. При отсутствии внешнего момента сопротивления возбужденная машина будет находиться в режиме холостого хода, характеризуемом свободным вращением ротора со скоростью, близкой к синхронной. Лишь в теоретически возможном случае полного исчезновения внутренних сил трения скорость вращения ротора может достигнуть синхронной скорости вращения поля. Тогда прекратится пересечение проводников ротора магнитными линиями поля и токи в роторе исчезнут. В этом случае говорят о режиме идеального холостого хода асинхронной машины. Режим идеального холостого хода можно создать и в реальной машине, если скорость вращения ее ротора искусственно увеличить до синхронной скорости при помощи какого-либо постороннего двигателя.
9.5. Режим генератора
Представим себе, что ротор возбужденной трехфазной асинхронной машины приведен во вращение каким-либо посторонним двигателем в направлении вращения магнитного поля с постоянной скоростью, превышающей скорость вращения поля (рис. 9.9, б). Тогда относительное движение проводников ротора в магнитном поле машины будет происходить в направлении движения поля, т. е. в направлении движения часовой стрелки. По сравнению с режимом двигателя в рассматриваемом случае фаза токов в обмотке ротора изменится на 180º, а электромагнитные силы, действующие на ротор, будут создавать момент, противодействующий вращению, что свидетельствует о передаче энергии посредством вращающегося поля от ротора к статору. Асинхронная машина, ротор которой вращается в направлении вращения магнитного поля со скоростью, превышающей скорость поля, работает в режиме генератора. Режим электромагнитного тормоза В третьем режиме — режиме электромагнитного тормоза — асинхронная машина работает тогда, когда ее ротор и магнитное поле вращаются в разных направлениях (рис. 9,9, в). Применив правила правой и левой руки, можно убедиться, что электромагнитный момент, возникающий от взаимодействия токов ротора с магнитным полем, вращающимся против направления вращения ротора, будет оказывать тормозящее действие на ротор. В режиме электромагнитного тормоза скорость относительного движения проводников ротора в магнитном поле превышает скорость вращения поля. Скольжение Итак, важнейшее свойство асинхронной машины состоит в том, что при ее работе магнитное поле и ротор вращаются с разными скоростями, не синхронно или асинхронно, что и получило отражение в наименовании этой машины. При анализе работы асинхронных машин удобно пользоваться безразмерной величиной s, называемой скольжением и определяемой отношением разности скоростей вращения магнитного поля Ω0 и ротора Ω к скорости вращения поля:
где Ω0 - Ω = Ωs — скорость вращения поля относительно ротора, называемая скоростью скольжения. В формуле скорость вращения ротора Ω — величина алгебраическая. Ее следует считать положительной при вращении ротора в направлении вращения магнитного поля и отрицательной — при встречном вращении поля и ротора. Зависимость скорости вращения ротора Ω от скольжения при заданной постоянной скорости вращения магнитного поля Ω0 графически выражается прямой, построенной на рис. 9.10 в соответствии с формулой Ω = Ω0(1 – S).
Для случая идеального холостого хода (Ωх = Ω0) скольжение s = 0; при неподвижном роторе (Ω = 0) скольжение s = 1. Режим двигателя (Ω <Ω0) характеризуется положительными величинами скольжения, изменяющимися в пределах от единицы до нуля, а режим генератора (Ω >Ω0) — отрицательными величинами скольжения. В режиме электромагнитного тормоза скольжение s> 1. Величину скольжения s можно также выразить через линейные скорости υ 0 и υ движения поля и ротора относительно статора или через частоты вращения поля n0 и ротора n:
где υs = υо — υ — линейная скорость скольжения; ns = п0 — п — частота скольжения.
Поиск по сайту: |

 раз номинальное фазное напряжение обмотки. Оба линейных напряжения указаны на паспортном щитке, укрепленном на корпусе.
раз номинальное фазное напряжение обмотки. Оба линейных напряжения указаны на паспортном щитке, укрепленном на корпусе.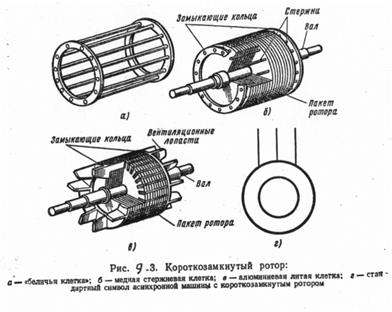


 [рад/с]
[рад/с]


 Режим двигателя
Режим двигателя