Рассмотрим сложное движение твердого тела, слагающееся из поступательного и вращательного движений. Соответствующий пример показан на рис. 78. Здесь относительным движением тела 1 является вращение с угловой скоростью вокруг оси Аа,укрепленной на платформе 2, а переносным – поступательное движение платформы со скоростью . Одновременно в двух таких движениях участвует и колесо 3, для которого относительным движением является вращение вокруг его оси, а переносным – движение той же платформы. В зависимости от значения угла α между векторами и (для колеса этот угол равен 90°) здесь возможны три случая.
Рис. 78. Сложное движение твердого тела
1. Скорость поступательного движения перпендикулярна оси вращения (). Пусть сложное движение тела слагается из вращательного движения вокруг оси Аа с угловой скоростью ω и поступательного движения со скоростью , перпендикулярной (рис. 79). Очевидно, что это движение представляет собой (по отношению к плоскости П, перпендикулярной оси Аа)плоскопараллельное движение.
Если считать точку А полюсом, то рассматриваемое движение, как и всякое плоскопараллельное будет действительно слагаться из поступательного со скоростью , т. е. со скоростью полюса, и из вращательного вокруг оси Аа, проходящей через полюс.
Рис. 79. Первый случай сложного движения тела (скорость поступательного движения перпендикулярна оси вращения)
Вектор , согласно разделу 6.2, можно заменить парой угловых скоростей и , принимая , а . При этом расстояние АР определится из равенства , откуда .
Векторы и дают при сложении ноль и, следовательно, движение тела в этом случае можно рассматривать как мгновенное вращение вокруг оси Рр с угловой скоростью . Таким образом, поворот тела вокруг осей Аа и Рр происходит с одной и той же угловой скоростью , т. е. вращательная часть движения не зависит от выбора полюса.
2. Винтовое движение (). Если сложное движение тела слагается из вращательного вокруг оси Аа с угловой скоростью и поступательного со скоростью , направленной параллельно оси Аа (рис. 80), то такое движение тела называется винтовым. Ось Аа называют осью винта. Когда векторы и направлены в одну сторону, то при принятом нами правиле изображения винт будет правым; если в разные стороны – левым. Расстояние, проходимое за время одного оборота любой точкой тела, лежащей на оси винта, называется шагом h винта. Если величины и постоянны, то шаг винта также будет постоянным. Обозначая время одного оборота через Т, получаем в этом случае и , откуда .
Рис. 80. Второй случай сложного движения тела (скорость поступательного движения параллельна оси вращения)
При постоянном шаге любая точка М тела, не лежащая на оси винта, описывает винтовую линию. Скорость точки М, находящейся от оси винта на расстоянии r,слагается из поступательной скорости и перпендикулярной ей скорости, получаемой во вращательном движении, которая численно равна ωr. Следовательно .
Направлена скорость по касательной к винтовой линии. Если цилиндрическую поверхность, по которой движется точка М, разрезать вдоль образующей и развернуть, то винтовые линии обратятся в прямые, наклоненные к основанию цилиндра под углом , где .
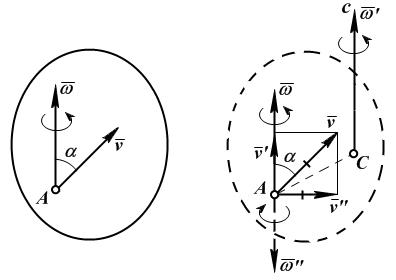
3. Скорость поступательного движения образует произвольный угол с осью вращения. Сложное движение, совершаемое телом в этом случае (рис. 81, а), можно рассматривать, как общий случай движения свободного твердого тела.
Разложим вектор (рис. 81, б) на составляющие: , направленную вдоль ( ), и , перпендикулярную ( ). Скорость можно заменить парой угловых скоростей и , после чего векторы и можно отбросить. Расстояние АС найдем по формуле .
б)
а)
а) Схематичное изображение рассматриваемого движения
б) Преобразование движения
Рис. 81. Третий случай сложного движения тела (скорость поступательного движения образует произвольный угол с осью вращения )
Тогда у тела остается вращение с угловой скоростью и поступательное движение со скоростью . Следовательно, распределение скоростей точек тела в данный момент времени будет таким же, как при винтовом движении вокруг оси Сс с угловой скоростью и поступательной скоростью .
Выполнив преобразования (рис. 81, б), мы перешли от полюса А к полюсу С. Результат подтверждает, что в общем случае движения твердого тела угловая скорость при перемене полюса не изменяется ( ), а меняется только поступательная скорость ( ).
Так как при движении свободного твердого тела величины , , α будут все время изменяться, то будет непрерывно меняться и положение оси Сс, которую поэтому называют мгновенной винтовой осью. Таким образом, движение свободного твердого тела можно еще рассматривать как слагающееся из серии мгновенных винтовых движений вокруг непрерывно изменяющихся винтовых осей.
Заключение
Роль и место теоретической механики в инженерном образовании определяется тем, что она является научной базой очень многих областей современной техники. Усвоение теоретической механики усложняется тем, что в этой науке существенную роль играет моделирование и математическое представление исследуемых явлений природы. Поэтому при решении инженерных задач студенты зачастую испытывают значительные трудности. Проблему формирования у студентов исследовательского подхода к поставленным задачам (из раздела «Кинематика» курса теоретической механики) позволяет решить предлагаемое учебное пособие. В пособии доступно освещены основные темы раздела «Кинематика» с приведением всех необходимых доказательств. Даны методические рекомендации к решению задач и приведены примеры их решения. Освоению и закреплению изложенного материала помогут задания для самостоятельной работы, приведенные в конце глав пособия.
 вокруг оси Аа,укрепленной на платформе 2, а переносным – поступательное движение платформы со скоростью
вокруг оси Аа,укрепленной на платформе 2, а переносным – поступательное движение платформы со скоростью  . Одновременно в двух таких движениях участвует и колесо 3, для которого относительным движением является вращение вокруг его оси, а переносным – движение той же платформы. В зависимости от значения угла α между векторами
. Одновременно в двух таких движениях участвует и колесо 3, для которого относительным движением является вращение вокруг его оси, а переносным – движение той же платформы. В зависимости от значения угла α между векторами 
 ). Пусть сложное движение тела слагается из вращательного движения вокруг оси Аа с угловой скоростью ω и поступательного движения со скоростью
). Пусть сложное движение тела слагается из вращательного движения вокруг оси Аа с угловой скоростью ω и поступательного движения со скоростью  , т. е. со скоростью полюса, и из вращательного вокруг оси Аа, проходящей через полюс.
, т. е. со скоростью полюса, и из вращательного вокруг оси Аа, проходящей через полюс.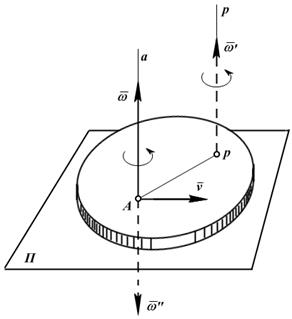
 и
и  , принимая
, принимая  , а
, а  . При этом расстояние АР определится из равенства
. При этом расстояние АР определится из равенства  , откуда
, откуда  .
. и
и  дают при сложении ноль и, следовательно, движение тела в этом случае можно рассматривать как мгновенное вращение вокруг оси Рр с угловой скоростью
дают при сложении ноль и, следовательно, движение тела в этом случае можно рассматривать как мгновенное вращение вокруг оси Рр с угловой скоростью  ). Если сложное движение тела слагается из вращательного вокруг оси Аа с угловой скоростью
). Если сложное движение тела слагается из вращательного вокруг оси Аа с угловой скоростью  и
и  , откуда
, откуда  .
.
 .
. по касательной к винтовой линии. Если цилиндрическую поверхность, по которой движется точка М, разрезать вдоль образующей и развернуть, то винтовые линии обратятся в прямые, наклоненные к основанию цилиндра под углом
по касательной к винтовой линии. Если цилиндрическую поверхность, по которой движется точка М, разрезать вдоль образующей и развернуть, то винтовые линии обратятся в прямые, наклоненные к основанию цилиндра под углом  , где
, где  .
. , направленную вдоль
, направленную вдоль  ), и
), и  , перпендикулярную
, перпендикулярную  ). Скорость
). Скорость  .
. и поступательной скоростью
и поступательной скоростью  ).
).