|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Кінематичний аналіз плоских важільних механізмів другого порядку однократної рухомості з нижчими кінематичними парами
В попередньому пункті встановлено, що клас і порядок механізму визначається видом структурних груп Ассура, на які він може бути розкладений. Цим же визначається і відповідний метод кінематичного аналізу механізму. Так для всіх механізмів другого порядку метод кінематичного аналізу буде однаковим, так як вони складені із початкового механізму і структурних груп другого порядку. Основними завданнями кінематичного аналізу механізмів є: визначення положення всіх рухомих ланок в межах одного періоду руху і побудова траєкторій характерних точок механізму; визначення лінійних швидкостей точок і кутових швидкостей ланок; визначення лінійних прискорень точок і кутових прискорень ланок механізму. Визначення траєкторій характерних точок механізму допомагає встановити картину взаємного положення ланок протягом одного періоду руху і намітити контур корпусу машини, що особливо важливо у випадку руху ланок в його середині, коли є небезпека співударів останніх. Визначення швидкостей і прискорень необхідна для оцінки впливу на окремі ланки і на всю машину сил інерції, які в сучасних швидкохідних машинах досягають величин, що в сотні разів перевищують власну вагу ланок. Наявність додаткових сил інерції збільшує навантаження на підшипники, що в свою чергу, приводить до збільшення сил тертя та порушення теплового балансу і режиму змащування. Періодичний рух є характерним для більшості машин. Під періодом будемо розуміти проміжок часу, за який механізм повертається в попереднє положення, а всі його кінематичні характеристики приймають початкові значення, після чого повторюються з попередньою закономірністю. Рух механізму розглядається з чисто геометричної точки зору, тобто без врахування причин, які його викликали, але з врахуванням фактору часу. Найбільш повно розробленими методами кінематичного дослідження є графічні методи, які потребують побудови схеми механізму для різних положень ведучої ланки за один період руху і виконання відповідних цим положенням масштабних геометричних побудов. Ці методи володіють рядом переваг, а тому мають широке застосування на практиці при кінематичних і кінетостатичних розрахунках механізмів. Недоліком є неможливість встановлення ступеня точності графічних побудов, так як кожна наступна побудова базується на попередній, що нерідко приводить до сумування помилок. 6.2.1. Побудова планів положень плоского механізму і визначення траєкторій його характерних точок. Розв’язок даної задачі передбачає, що відомо положення стаціонарних (нерухомих) точок механізму та розміри всіх його рухомих ланок. Масштаб довжин вибирається за формулою
де На першому етапі проводиться побудова стаціонарних точок. Одна з них вибирається довільно, а інші будуються за вихідними даним. Для прикладу розглянемо чотириланковий механізм кривошипно-коромислового типу (рис. 6.29). Ланка Ланка Траєкторію точки Для ров’язку поставленої задачі необхідно побудувати положення механізму для кожної з точок
Рис. 6.29. План положень механізму
Розглянемо одну з них, наприклад Для інших положень Зауважимо, що в окремих випадках при заданих розмірах ланок не можна одержати геометричний розв’язок задачі, тобто не можна забезпечити замкненість кінематичного ланцюга, що визначає механізм. В цій ситуації необхідно змінити положення стаціонарних точок Побудовані плани механізму дозволяють визначити положення довільної точки механізму за один період руху. З’єднуючи їх плавною лінією одержимо траєкторію руху цієї точки (точка Аналогічно проводиться побудова положень і траєкторій характерних точок для механізмів інших типів. 6.2.2. Визначення швидкостей і прискорень методом планів. Побудова планів швидкостей. Другою задачею кінематичного аналізу механізмів є визначення швидкостей точок механізму і кутових швидкостей його ланок, що найчастіше виконується графічно шляхом побудови планів швидкостей для ряду положень механізму за один період руху. Нехай ведуча ланка механізмів, розглянутих нижче, здійснює рівномірний обертальний рух з кутовою швидкістю 1. Кривошипно-коромисловий механізм (рис. 6.30).
Рис. 6.30. Кінематична схема кривошипно-коромислового механізму
Ланка
Такий же рух здійснює ланка
Кутова швидкість Шатун
 , ,
де
Співвідношення (6.9) називається основним векторним рівнянням для визначення швидкостей. Тут і надалі відомі векторні величини, підкреслені двома рисками знизу. Величини, для яких відомо тільки напрямок, підкреслені однією рискою. Під рисками вказано напрямок відповідного вектора.
Масштаб швидкостей вибираємо за формулою
 (полюс). У відповідності до (6.9) через цю точку проводимо пряму, яка перпендикулярна до (полюс). У відповідності до (6.9) через цю точку проводимо пряму, яка перпендикулярна до  і будуємо відрізок і будуємо відрізок  . З точки . З точки  проводимо пряму, перпендикулярну до проводимо пряму, перпендикулярну до  , а з точки пряму, перпендикулярну до , а з точки пряму, перпендикулярну до  . Ці прямі в перетині визначають точку . Ці прямі в перетині визначають точку  . Побудова трикутника . Побудова трикутника  , який відповідає (6.9), завершена (рис. 6.31). , який відповідає (6.9), завершена (рис. 6.31).
Напрямки відрізків Для визначення величин
З іншого боку
Таким чином, кутові швидкості всіх рухомих ланок механізму визначені. При визначенні лінійних швидкостей точок використовуємо властивості обертального і плоскопаралельного рухів твердого тіла. Якщо точка
Для точки
При цьому Будуючи на прямій Побудована на рис. 6.31 конфігурація називається планом швидкостей для заданого положення механізму. Абсолютні швидкості точок визначаються напрямленими відрізками, які виходять з миттєвого центра обертання – полюса
Відрізки Для визначення напрямків кутових швидкостей ланок
Рис. 6.32. Визначення напрямків лінійних і кутових швидкостей та прискорень ланок кривошипно-коромислового механізму
2. Кривошипно-повзунковий механізм (рис. 6.33). Ланки
Повзун Рівняння Ейлера для ланки
Рис. 6.33. Кінематична схема кривошипно-повзункового механізму
 . .
Побудова плану швидкостей проводиться за такою ж схемою, як і для кривошипно-коромислового механізму. Відзначимо, що у даному випадку кутова швидкість повзуна дорівнює нулю. За результатами побудови (рис. 6.34) визначаємо

Напрямок кутової швидкості 3. Кривошипно-кулісний механізм (рис. 6.36).
Рис. 6.36. Кінематична схема кривошипно-кулісного механізму
Ланки
 , ,
де В даному випадку
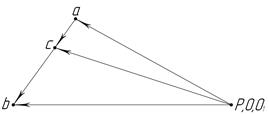
Побудова плану швидкостей за рівнянням (6.11) зводиться до побудови прямокутного трикутника за гіпотенузою і напрямками катетів (рис. 6.37).
 
Із цього плану визначаємо
Напрямок кутової швидкості Побудова планів прискорень. Плани прискорень для заданого положення механізму будуються аналогічно плану швидкостей. 1. Кривошипно-коромисловий механізм (рис. 6.30). Запишемо для ланки
 . .
В даному випадку
Масштаб плану прискорень вибираємо за формулою Графічну реалізацію (6.12) здійснимо шляхом побудови від довільно вибраної точки Через точку Побудована конфігурація називається планом прискорень, з якого визначаємо дійсні значення всіх прискорень
Кутові прискорення ланок визначаємо із співвідношень
Для визначення напрямків кутових прискорень необхідно умовно перенести з плану прискорень вектори Прискорення точок 2. Кривошипно-повзунковий механізм (рис. 6.33). Формула Ейлера для ланки
 . .
Величини Графічна побудова рівняння (6.13) здійснюється за тією ж схемою, що і рівняння (6.12). План прискорень для заданого положення механізму наведено на рис. 6.40.
Рис. 6.40. План прискорень кривошипно-повзункового механізму
Кутове прискорення
Його напрямок зображено на рис. 6.35. 3. Кривошипно-кулісний механізм (рис. 6.36). Основне векторне рівняння для побудови плану прискорень записується у вигляді теореми Коріоліса для ланки 2
 . .
Тут При цьому маємо
а напрямок – за правилом Жуковського: щоб одержати напрямок вектора План прискорень, який відповідає векторному рівнянню (6.14) наведено на рис. 6.41, з якого визначаємо
 , ,  , ,  . .
Напрямок кутового прискорення Будуючи плани швидкостей і прискорень для різних положень механізму, можна встановити як змінюються кінематичні характеристики його точок і ланок за один період руху.
Поиск по сайту: |
 ,
, – істинна довжина ланки
– істинна довжина ланки  .
. , тому її траєкторією є коло з центром в точці
, тому її траєкторією є коло з центром в точці  .
. , її траєкторією буде дуга кола з центром в точці
, її траєкторією буде дуга кола з центром в точці  . Будуємо ці кола.
. Будуємо ці кола. розбиваємо на 8-12 однакових частин точками
розбиваємо на 8-12 однакових частин точками  Точку
Точку  вибираємо так, щоб механізм перебував у так званому "мертвому" положенні, коли точки
вибираємо так, щоб механізм перебував у так званому "мертвому" положенні, коли точки  і
і  розхилом циркуля
розхилом циркуля 
 ) робимо засічку на траєкторії точки
) робимо засічку на траєкторії точки  . Пряма
. Пряма  в перетині з траєкторією точки
в перетині з траєкторією точки  визначають одне із двох мертвих положень механізму.
визначають одне із двох мертвих положень механізму.

 і побудуємо відповідну їй точку
і побудуємо відповідну їй точку  на траєкторії точки
на траєкторії точки  і знаходимо її точки перетину з траєкторією точки
і знаходимо її точки перетину з траєкторією точки  точки
точки  на рис. 6.29).
на рис. 6.29). . При заданих стаціонарних точках і розмірах ланок його положення в заданий момент часу однозначно визначається кутом
. При заданих стаціонарних точках і розмірах ланок його положення в заданий момент часу однозначно визначається кутом  . Для визначення швидкостей характерних точок механізму і кутових швидкостей його ланок в заданому положенні необхідно умовно розділити механізм на окремі ланки (тверді тіла) і встановити характер руху кожної з них та визначити кінематичні характеристики.
. Для визначення швидкостей характерних точок механізму і кутових швидкостей його ланок в заданому положенні необхідно умовно розділити механізм на окремі ланки (тверді тіла) і встановити характер руху кожної з них та визначити кінематичні характеристики.
 ,
,  .
. ,
,  .
. наперед невідома і підлягає визначенню.
наперед невідома і підлягає визначенню. – обертальна швидкість точки
– обертальна швидкість точки  ,
,  .
. Розв’язок задачі полягає в графічній побудові векторного рівняння (6.9). За правилом додавання векторів вона зводиться до побудови трикутника за стороною і напрямками двох інших сторін.
Розв’язок задачі полягає в графічній побудові векторного рівняння (6.9). За правилом додавання векторів вона зводиться до побудови трикутника за стороною і напрямками двох інших сторін. ,
,  , де
, де  на плані.
на плані. ,які відповідають швидкостям
,які відповідають швидкостям  , визначаються за правилом додавання векторів.
, визначаються за правилом додавання векторів. потрібно їх зображення помножити на
потрібно їх зображення помножити на  .
. ,
,  .
. ,
,  .
. належить ланці
належить ланці  (
(  ). Зображенням вектора
). Зображенням вектора  на плані буде напрямлений відрізок
на плані буде напрямлений відрізок  , причому точка
, причому точка  ділить цей відрізок у тому ж відношенні, що і точка
ділить цей відрізок у тому ж відношенні, що і точка  .
. .
. ,
,  .
. точку
точку  ми визначаємо напрямлений відрізок
ми визначаємо напрямлений відрізок  , який зображує швидкість
, який зображує швидкість  .
. ;
;  ;
;  .
. та інші вимірюються в міліметрах.
та інші вимірюються в міліметрах. і
і 
 , тому всі його точки мають однакову швидкость
, тому всі його точки мають однакову швидкость 
 та лінійних швидкостей відповідно до плану швидкостей
та лінійних швидкостей відповідно до плану швидкостей 
 здійснюють обертальні рухи відносно точок
здійснюють обертальні рухи відносно точок  – поступальна (відносна) швидкість ланки 2 вздовж ланки 3;
– поступальна (відносна) швидкість ланки 2 вздовж ланки 3;  – обертальна (переносна) швидкість ланки 2 разом з ланкою 3 навколо точки
– обертальна (переносна) швидкість ланки 2 разом з ланкою 3 навколо точки  ;
;  ,
,  .
. ,
,  ,
,  .
. ланки
ланки  ,
,  ;
;  тому, що рух кривошипа
тому, що рух кривошипа  ,
,  ;
;  ,
,  ;
; ,
,  ;
;  ,
,  .
. В основному векторному рівнянні (6.12) підлягають визначенню дві величини
В основному векторному рівнянні (6.12) підлягають визначенню дві величини  і
і  .
. , де
, де  – напрямлений відрізок, яким будемо зображувати
– напрямлений відрізок, яким будемо зображувати  .
. (полюса) двох частин векторного рівняння.
(полюса) двох частин векторного рівняння. такий, що
такий, що  . Через точку
. Через точку  проводимо пряму, перпендикулярну
проводимо пряму, перпендикулярну  такий, що
такий, що  . Через точку
. Через точку  проводимо пряму, перпендикулярну
проводимо пряму, перпендикулярну  ,
,  ,
, ,
,  .
. ,
,  .
. і
і  в точку
в точку  визначаються за тим самим принципом, що і їх швидкості.
визначаються за тим самим принципом, що і їх швидкості. визначаються із таких самих співвідношень, що і для кривошипно-коромислового механізму.
визначаються із таких самих співвідношень, що і для кривошипно-коромислового механізму.
 ланки
ланки  – нормальна і тангенціальна складові абсолютного прискорення точки
– нормальна і тангенціальна складові абсолютного прискорення точки  – поступальне (відносне) прискорення ланки 2 вздовж ланки 3;
– поступальне (відносне) прискорення ланки 2 вздовж ланки 3;  і
і  – нормальна і тангенціальна складові обертального (переносного) прискорення ланки 2 разом з ланкою 3 навколо точки
– нормальна і тангенціальна складові обертального (переносного) прискорення ланки 2 разом з ланкою 3 навколо точки  ;
;  ,
,  ;
;  ,
,  .
. Величина прискорення Коріоліса визначається за формулою
Величина прискорення Коріоліса визначається за формулою ,
, потрібно вектор
потрібно вектор  зображено на рис. 6.38.
зображено на рис. 6.38.