|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Схема с откатом (Rollback Scheme)
Работа Rollback-схемы [51] основана на использовании аппаратной и программной избыточности. Процессорные модули A и B выполняют копии одной и той же задачи. При отсутствии ошибок на интервале Всякий раз, когда определяется несовпадение двух контрольных точек, производится повторное выполнение этого интервала (ситуация «В»). На рис. 2.3 (б) показаны действия в системе при возникновении ошибки в процессорном модуле B. То же самое происходит при возникновении ошибки в процессорном модуле A.
рис. 2.3. Варианты развития событий в Rollback-схеме: а – нет ошибок; б – откат в результате ошибки в модуле B или одновременном возникновении ошибок в обоих ВМ.
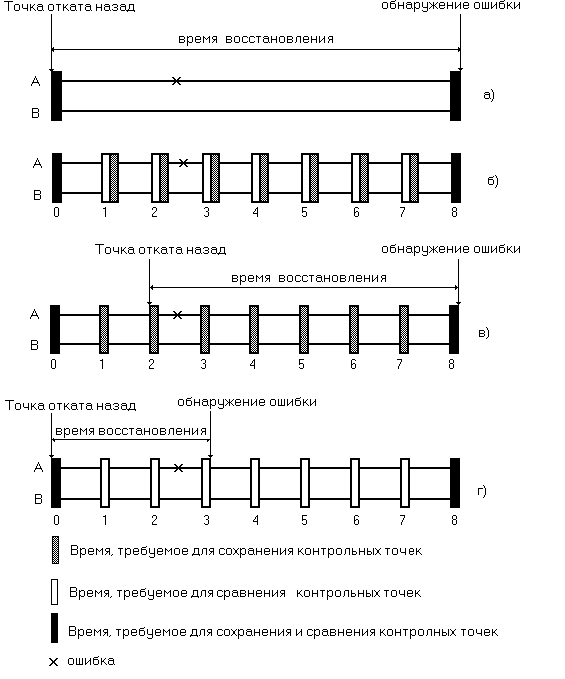
Можно использовать четыре способа формирования контрольных точек, (рис.(2.4)):
рис. 2.4 Варианты способа формирования контрольных точек в Rollback-схеме.
а) - используются контрольные точки сохранения и сравнения состояний процессоров: Контрольные точки сохраняются в начале интервала решения задачи, в конце решения задачи состояния модулей А и В сравниваются, если состояния не совпадают, то оба процессора выполняют откат назад к начальному интервалу, и целый интервал выполняется снова (рис. 2.4а)). Если состояния совпадают, то задача завершена, и оба процессора выполняют следующий интервал решения задачи. б) – использование промежуточных контрольных точек сохранения и сравнения состояний процессоров (SCCP): интервал решения задачи делится на подинтервалы (на рис.2.4 б) их 8), контрольные точки сохраняются в начале каждого подинтервала, в конце каждого подинтервала состояния модулей А и В сравниваются, если состояния не совпадают, то оба процессора выполняют откат назад к началу подинтервала, и он выполняется снова. Если состояния совпадают, то оба процессора выполняют следующий подинтервал решения задачи. в) - использование промежуточных контрольных точек сохранения состояний процессоров (SCP): В каждой контрольной точке подинтервала сохраняются состояния модулей A и B, в конце интервала решения задачи (в конце последнего подинтервала) состояния модулей A и B сравниваются. Если состояния совпадают, то задача – завершена, и оба процессора выполняют следующий интервал решения задачи. Если состояния не совпадают, то находят подинтервал, где это происходит, и оба процессора выполняют откат назад к найденному подинтервалу. В примере откат назад выполнен к подинтервалу 2 (рис.2.4 в)). г) использование промежуточных контрольных точек сравнения состояний процессоров (CCP):В конце каждого подинтервала сравниваются состояния модулей А и В. Если состояния не совпадают, то ошибка обнаружена, и оба процессора выполняют откат назад к началу интервала, и интервал выполняют снова. Если состояния совпадают, то задача завершена, и оба процессора выполняют следующий подинтервал. В данном примере, ошибка в процессоре обнаружена в конце подинтервала 3, (рис. 2.4 г)).
АЛГОРИТМЫ РАБОТЫ Схема – (а) Шаг 1: Задать исходные состояния модулей А и В . Шаг 2: Решить задачу на очередном интервале. Шаг 3: В конце решения задачи состояния модулей А и В сравниваются. Шаг 4: Если состояния не совпадают, то идти к шагу 2. Шаг 5: Если состояния совпадают, то задача завершена. Заменить старые состояния модулей на новые. Шаг 6: Идти к шагу 1.
Схема – (б) Шаг 1: Интервал решения задачи делится на подинтервалы. Шаг 2: Контрольные точки сохраняются в начале каждого интервала. Шаг 3: Оба процессора выполняют данный подинтервал. Шаг 4: В конце каждого подинтервала состояния модулей А и В сравниваются. Шаг 5: Если состояния не совпадают, то идти к шагу 3. Шаг 6: Если состояния совпадают, то контрольные точки сохраняются. Шаг 7: Выполнение следующего интервала. Шаг 8: Идти к шагу 3.
Схема – (в) Шаг 1: Оба процессора выполняют данный подинтервал. Шаг 2: В каждом подинтервале сохраняются состояния модулей А и В. Шаг 3: В конце интервала решения задачи (в конце последнего подинтервала) состояния модулей А и В сравниваются. Шаг 4: Если они не совпадают, то находят подинтервал, где это происходит, и оба процессора выполняют откат назад к найденному подинтервалу, далее идти к шагу 3. Шаг 5: Если состояния совпадают, то задача завершена. Шаг 6: Выполнение следующего интервала. Шаг 7: Идти к шагу 1.
Схема – (г) Шаг 1: Контрольные точки сохраняются в начале интервала решения задачи. Шаг 2: Оба процессора выполняют данный подинтервал. Шаг 3: В конце каждого подинтервала сравниваются состояния модулей А и В. Шаг 4: Если состояния не совпадают, то ошибка обнаружена, и оба процессора выполняют шаг 2. Шаг 5: Если состояния совпадают, то задача завершена. Шаг 6: Выполнение следующего интервала. Шаг 7: Идти к шагу 2. Схема восстановления вычислительного процесса с накатом (Roll-Forward Checkpointing Scheme - RFCS). При использовании схемы с накатом (RFCS-схемы) кроме пары процессорных модулей, выполняющих копии задач, в системе выделяется небольшое количество доступных свободных модулей, выполняющих некритичные по времени задачи, которые могут быть прерваны [51]. Эти свободные модули используются для диагностики и восстановления в случае обнаружения ошибки. В зависимости от места возникновения ошибки, в RFCS-схеме возможны четыре сценария. Пусть интервал, предшествующий интервалу (A) Нет ошибок: В процессорных модулях A и B на интервале (B) Одна ошибка: Эта ситуация имеет место в случае, когда в единственном модуле возникает ошибка на интервале Без потери общности предположим, что на интервале При возникновении ошибки в интервале
рис. 2.5 Возможные ситуации при восстановлении вычислительного процесса в RFCS-схеме а – восстановление без отката назад; б – откат после одного интервала повтора; в – откат после двух интервалов повтора.
Шаг 1: Состояние S приводится в соответствие с состоянием модулей А и В в контрольной точке Шаг 2: После завершения выполнения S интервала Во время выполнения S интервала Шаг 3: Для проверки правильности выполнения А на интервале Шаг 4: На предыдущем шаге было определено, что А и В находятся в корректном состоянии в начале интервала Из приведенных рассуждений видно, что параллельный повтор позволяет избежать отката вопреки ошибке в В. Затраты в этом случае составляют только (С) Возврат после одного интервала повтора: В этом случае, восстановление не является успешным, и система производит откат назад к началу интервала В этом случае при несовпадении контрольных точек на интервале (D) Возврат после двух интервалов повтора: В данном случае возможны следующие сценарии развития событий: модуль В (А) ошибся на Для иллюстрации рассмотрим сценарий, приведенный на рис. 2.5.(в). Шаги 1 – 3 являются полностью идентичным соответствующим шагам в ситуации В. Однако, при сравнении Описанные выше шаги по восстановлению вычислительного процесса инициируются только в том случае, когда число интервалов, оставшихся до окончания задачи, больше двух. На последних двух интервалах выполнения задачи производится откат назад.
Поиск по сайту: |
 состояние контрольной точки
состояние контрольной точки  запоминается в памяти, после чего выполняется следующий интервал (ситуация «А» рис. 2.3 (а)).
запоминается в памяти, после чего выполняется следующий интервал (ситуация «А» рис. 2.3 (а)).
 (
(  и
и  ) совпадают. Интервалы, следующие за
) совпадают. Интервалы, следующие за  и
и  . Четыре возможные ситуации развития событий обозначаются через A – D.
. Четыре возможные ситуации развития событий обозначаются через A – D. и
и  модулей A и B не совпадают. После обнаружения ошибки, контрольная точка
модулей A и B не совпадают. После обнаружения ошибки, контрольная точка  остается в памяти. Дополнительно сохраняются обе контрольные точки
остается в памяти. Дополнительно сохраняются обе контрольные точки 
 сравнивается с
сравнивается с  .
. сравнивается с
сравнивается с  . В традиционной Rollback схеме затраты много больше, по крайней мере
. В традиционной Rollback схеме затраты много больше, по крайней мере  .
.