|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
3.1. Выбор осей координат. Углы Крылова (корабельные Вращательным движением твердого тела вокруг неподвижной точки называется такое его движение, при котором одна точка твердого тела или неизменно с ним связанная остается неподвижной относительно выбранной системы отсчета. Его еще называют сферическим движением, поскольку траектория любой точки тела лежит на поверхности сферы с центром в неподвижной точке. Примером такого движения служит волчок, у которого остается неподвижной точка опоры. Число степеней свободы свободно движущегося в пространстве твердого тела равно шести. Если во время движения тела одна его точка остается неподвижной, то число степеней свободы такого тела при его вращении вокруг этой неподвижной точки будет равно трем и для оценки его положения необходимо задать три независимых параметра. Сделать это можно различными способами. Например, А.Н. Крылов в качестве таких параметров предложил так называемые корабельные углы, определяющие положение твердого тела (корабля) относительно системы координат, связанной своим началом с его центром тяжести (рис. 3.1).
Рис. 3.1
За оси неподвижной системы координат приняты CXYZ, а за оси жестко связанные с кораблем – Cxyz (рис. 3.1). Ось СХ направлена от кормы к носу корабля, ось CZ –к его правому борту, а ось CY образует с ними правую систему координат (вертикально вверх). Положение подвижной системы координат Cxyz, неизменно связанной с кораблем, относительно неподвижной CXYZ для каждого момента времени определяется тремя углами Крылова: углом дифферента
Рис. 3.2 Как видно на рис. 3.2, плоскость CXY пересекает плоскость Cxy по некоторой прямой Для совмещения системы CXYZ с системой Cxyz достаточно: 1) повернуть систему CXYZ вокруг третьей из координатных осей CZ на угол дифферента
Рис. 3.3
2) повернуть систему
Рис. 3.4 3) повернуть систему
Рис. 3.5
Формулы преобразования координат связаны следующими соотношениями: 1) от CXYZ к X = x1 cos y - y1 sin y + 0 , Y =x1 sin y + y1 cos y + 0 , (3.1) Z = 0 + 0 + z1 , или в матричной форме: [X] ={ a3y}т [x1] , или где
2) от системы x1 = x2 + 0 + 0 , y1 = 0 + y2 z1 = 0 + y2 или в матричной форме [x1] = где
3) от системы координат x2 = x cos j + 0 + z sin j, y2 = 0 + y + 0 , (3.7) z2 = -x sin j + 0 + z cos j, или в матричной форме [x2]=
Причем поворотная матрица {a2j }т – это матрица, транспонированная к матрице { a2j }, задающей преобразование поворота от осей системы
Для любой точки М тела с координатами x, y, z в подвижной системе координат, жестко связанной с ним, и с ее же координатами X, Y, Z – в неподвижной системе координат можно установить взаимосвязь проекций вектора точки
или в матричном виде
где углы Крылова являются некоторыми функциями времени: угол дифферента Матрица Подставляя в (3.2) соотношения (3.5) и (3.8), получаем:
Сравнивая (3.11) и (3.12), находим, что искомая матрица
=
Подставляя в (3.2) соотношение (3.5), получаем промежуточное соотношение, которое может понадобиться в дальнейшем, [X] =
=
Углы Эйлера
В тех случаях, когда угловая скорость вращения в одном направлении значительно больше, чем в двух других (генераторы, моторы, турбины, гироскопы), для определения положения тела в качестве трех независимых параметров выбирают три угла Эйлера: угол прецессииy (t),угол нутацииq (t) иугол ротации (собственного вращения) j (t). Их названия заимствованы из астрономии. Чтобы задать эти углы, рассмотрим вращение твердого тела вокруг неподвижной точки О. Пусть даны некоторая система отсчета и связанная с ней неподвижная система координат ОXYZ, относительно которой движется твердое тело, и связанная с твердым телом система координат Оxyz, которая движется относительно первой (рис. 3.6 … 3.8). Это означает, что первая и вторая системы координат имеют общее начало O, а углы, образуемые осями Оxyz с осями ОXYZ, изменяются, т.е. система Оxyz
Рис. 3.6
Рис. 3.7 Плоскость ОXZ (заштрихованный овал) пересекает плоскость Оxz (белый овал) по некоторой (рис. 3.8) прямой Оz(1) =Оz(2) = OE, образующей угол y с неподвижной осью ОZ, и угол j с подвижной осью Оz, которая называется «линией узлов» ОЕ с единичным ортом
Рис. 3.8
Неподвижная ось ОY,вокруг которойповорачивается твердое тело на угол прецессииy, называется осью прецессии с единичным ортом Изменение угла нутацииq сопровождается вращением твердого тела вокруг линии узлов Оz1 = Оz2 = OE, называемой осью нутации. Наконец, угол ротации (собственного вращения)j характеризует вращение тела вокруг оси Oy = Oy2, называемой осью ротации (собственного вращения) с единичным ортом На рис 3.6 … 3.8 все углы положительные, т.е. против хода часовой стрелки, если смотреть на поворот тела с положительных направлений осей вращения OY, OE и Oy. Движение твердого тела в любой момент времени полностью определяется положением подвижной связанной с твердым телом системы координат Оxyz относительно неподвижной системы координат ОXYZ, т.е. заданием кинематических уравнений вращения тела вокруг неподвижной точки О: угла прецессии
Поиск по сайту: |

 , углом крена
, углом крена  , углом рыскания
, углом рыскания  (рис. 3.2).
(рис. 3.2).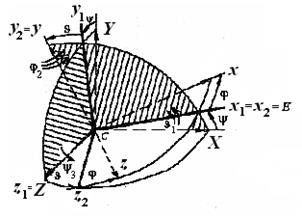
 , образующей угол
, образующей угол 
 вокруг первой из координатных осей
вокруг первой из координатных осей  на угол крена
на угол крена  , при этом
, при этом  (рис. 3.4);
(рис. 3.4);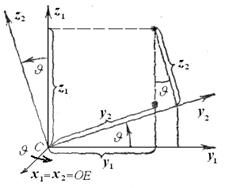
 вокруг второй из координатных осей
вокруг второй из координатных осей  на угол рыскания
на угол рыскания 
 (рис. 3.3)
(рис. 3.3) , (3.2)
, (3.2) - матрица, транспонированная к матрице
- матрица, транспонированная к матрице  , описывающей поворот системы CXYZ вокруг третьей координатной оси СZ на угол дифферента y,
, описывающей поворот системы CXYZ вокруг третьей координатной оси СZ на угол дифферента y, ; (3.3)
; (3.3) - z 2
- z 2  , (3.4)
, (3.4) [x2] , или
[x2] , или  , (3.5)
, (3.5) , задающей преобразование поворота от осей системы
, задающей преобразование поворота от осей системы  на угол крена
на угол крена  ,
, ; (3.6)
; (3.6) [x], или
[x], или . (3.8)
. (3.8) =
=  , имеет вид
, имеет вид . (3.9)
. (3.9) на оси двух систем координат,
на оси двух систем координат, , (3.10)
, (3.10) или
или  , (3.11)
, (3.11) ,угол крена
,угол крена  ,угол рыскания
,угол рыскания  .
. транспонирована к матрице направляющих косинусов
транспонирована к матрице направляющих косинусов  , задающей преобразование поворота от осей неподвижной системы CXYZ к осям подвижной системы Cxyz, неизменно связанной с кораблем. Очевидно, что при движении тела координаты x, y, z остаются постоянными в отличие от координат X, Y, Z.
, задающей преобразование поворота от осей неподвижной системы CXYZ к осям подвижной системы Cxyz, неизменно связанной с кораблем. Очевидно, что при движении тела координаты x, y, z остаются постоянными в отличие от координат X, Y, Z.  . (3.12)
. (3.12) является произведением трех поворотных матриц
является произведением трех поворотных матриц =
=


 .(3.13)
.(3.13) =
= 
 (3.13a)
(3.13a)

 . Кроме того, плоскость Оxz образует с плоскостью ОXZ угол q, равный углу между осями ОY и Оy.
. Кроме того, плоскость Оxz образует с плоскостью ОXZ угол q, равный углу между осями ОY и Оy.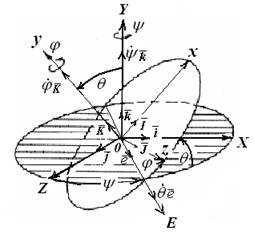
 .
. .
. иугларотации (собственного вращении)
иугларотации (собственного вращении)