|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Схемы конструкций и исходные данные к работе
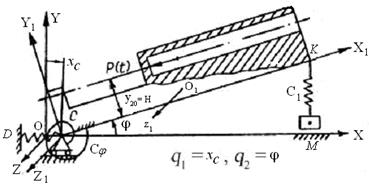
«Динамика несвободной системы с двумя степенями свободы»
Схемы конструкций представлены на рис. 6.2. Исходные данные приведены в табл. 6.1 (основные размеры, массы звеньев, жесткости пружин и пр.), начальные условия обобщенных координат и обобщенных скоростей – в табл. 6.2. Конкретно задача сформулирована в соответствии с номером варианта на рис. 6.2.
Продолжение табл. 6.1
Окончание табл. 6.1
Примечание. Символом * отмечены величины, рассчитываемые в процессе решения задачи.
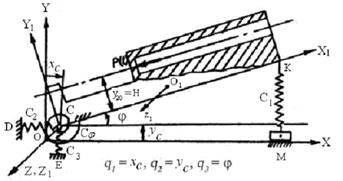
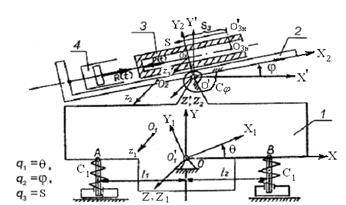
Вариант 1. Полый цилиндр 2 массой m2 скользит по основанию 1 массой m1, способному вращаться вокруг неподвижного цилиндрического шарнира О. Основание удерживается спиральной пружиной с крутильной жесткостью В начальный момент времени к внутренней поверхности дна цилиндра прикладывается нагрузка
где постоянные P1 = 2, 37×106 H; a1= 6,68×1010H/c2 ;t1 = 0,005 c; P2 = 0 H; a2= 0 H/c2; t2= 0 c.
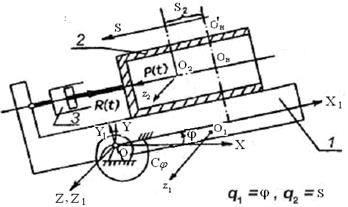
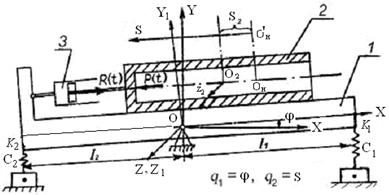
Рис. 6.2

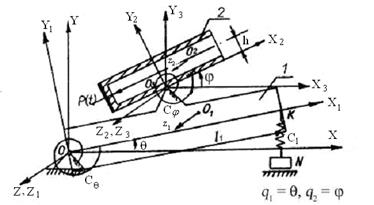
Рис. 6.2. Продолжение



Рис. 6.2. Продолжение

При этом цилиндр 2 начинает двигаться по основанию 1, вызывая вращение последнего вокруг оси шарнира OZ. Движение цилиндра тормозится реакцией тормозного устройства 3, приложенной к внешней поверхности дна цилиндра:
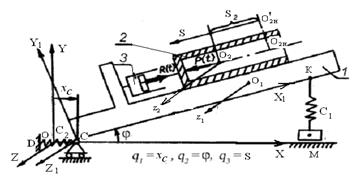
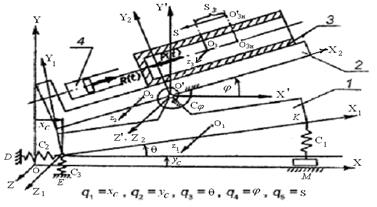
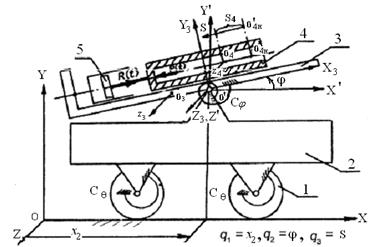
где постоянные R1 = 2,4×105 H; b1= 5,8×106H/c; t3= 0,01c; Коэффициент трения скольжения при движении цилиндра по основанию f = 0,12. Моменты инерции основания 1 и цилиндра 2 относительно осей O1z1 и O2Z2 равны J1 и J2 соответственно. Составить дифференциальные уравнения движения системы и рассчитать конкретное движение на ЭВМ. Указание. В качестве обобщенных координат выбрать угол поворота j основания 1, отсчитанный от горизонтали (в начальный момент j = j0), и координату S центра масс цилиндра 2 на направляющей основания 1, отсчитанную от его начального положения. Вариант 2. Полый цилиндр 2 массой m2 скользит по основанию 1 массой m1, опирающемуся на цилиндрический шарнир О и поддерживаемому вертикальной пружиной КМ. Жесткость пружины C1, длина недеформированной пружины l2, расстояние от шарнира О до точки К опоры пружины l1. Коэффициент трения цилиндра об основание f = 0,12. В начальный момент пружина КМ поддерживает систему в положении статического равновесия. Введем неподвижную систему координат OXYZ, ось OX которой горизонтальна, и связанную с основанием систему координат OX1Y1Z1, ее ось OX1 параллельна направляющей основания, по которой скользит цилиндр. Положение центра масс O1 основания задается координатами x1O и y1O точки O1 в системе координат OX1Y1Z1, причем y1O = 0,6 м. Начальное положение цилиндра на основании определяется начальными значениями координат x2O и y2O точки O2 в системе координат OX1Y1Z1. Точка Oн совпадает с начальным положением центра масс цилиндра O2. В начальный момент времени к внутренней поверхности дна цилиндра прикладывается переменная нагрузка P(t), определяемая по формуле (6.1). При этом цилиндр 2 начинает скользить по основанию 1, вызывая вращение последнего вокруг оси шарнира OZ. Движение цилиндра тормозится реакцией R(t) тормозного устройства 3, приложенной к внешней поверхности дна цилиндра. Величина реакции определяется по формуле (6.2). Моменты инерции основания 1 и цилиндра 2 относительно осей O1z1 и O2z2 равны J1 и J2 соответственно. Составить дифференциальные уравнения движения системы и рассчитать конкретное движение на ЭВМ. Указание. В качестве обобщенных координат выбрать угол поворота j основания 1, отсчитанный от горизонтали, и координату S центра масс цилиндра на направляющей основания, отсчитанную от его начального положения Oн. Начальное значение j = j0. Длину недеформированной пружины l2 определить из условия статического равновесия системы в начальный момент времени. Вариант 3. Полый цилиндр 2 массой m2 скользит по основанию 1 массой m1, опирающемуся на цилиндрический шарнир О, помещенный в центр масс основания. Основание поддерживается двумя вертикальными пружинами с жесткостями C1 и C2, отстоящими от оси шарнира на расстояния l1 и l2. Коэффициент трения цилиндра о направляющие основания 1 f = 0,12. При начальном положении основания 1 пружины не деформированы. Точки К1 и К2 крепления пружин к основанию лежат на оси OX1. В точке О построены неподвижная система координат OXYZ и система координат OX1Y1Z1, неизменно связанная с основанием, так, что ось OX1 параллельна направляющим основания, по которым скользит цилиндр, и оси цилиндра. Начальное положение цилиндра задается координатами x2O и y2O центра масс цилиндра O2 в системе координат OX1Y1Z1. В начальный момент времени к внутренней поверхности дна цилиндра прикладывается нагрузка P(t), определяемая по формуле (6.1). При этом цилиндр 2 начинает перемещаться по основанию 1, вызывая вращение последнего вокруг оси шарнира OZ. Движение цилиндра тормозится реакцией R(t) тормозного устройства 3, определяемой по зависимости (6.2). Моменты инерции основания и цилиндра относительно осей O1z1 и O2z2 равны J1 и J2 соответственно. Составить дифференциальные уравнения движения системы и рассчитать конкретное движение на ЭВМ. Указание. В качестве обобщенных координат выбрать угол поворота j основания , отсчитанный от горизонтали, и координату S центра масс цилиндра на направляющей основания, отсчитанную от его начального положения Oн. Начальное значение j = j0 = 0. Вариант 4. Полый цилиндр 2 массой m2 скользит по основанию 1 массой m1, опирающемуся на цилиндрический шарнир О, помещенный в центр масс основания. Основание поддерживается двумя вертикальными пружинами с жесткостями C1 и C2 и точками крепления K1 и K2 ,отстоящими от оси шарнира О на расстояния l1 и l2 соответственно, и спиральной пружиной с жесткостью Cj, препятствующей вращению вокруг оси OZ. Введем неподвижную систему координат OXYZ, ось OX которой горизонтальна, и систему координат OX1Y1Z1, неизменно связанную с основанием. При этом ось OX1 параллельна направляющей основания, по которой скользит цилиндр, и оси цилиндра. Точки К1 и К2 крепления пружин к основанию лежат на оси OX1. Положение центра масс O1 основания задается координатами x1O и y1O в системе координат OX1Y1Z1, причем x1O = 0,25 м, y1O = –0,18 м. Начальное положение цилиндра на основании определяется начальными значениями координат x2O и y2O точки O2 в системе координат OX1Y1Z1, причем x2O = 0,8 м, y2O = 0,06 м. Коэффициент трения при скольжении цилиндра по основанию f = 0,12. Начальный угол наклона основания к горизонту j0 = 0, 30, 45°. В начальный момент времени к внутренней поверхности дна цилиндра прикладывается нагрузка P(t), определяемая по формуле (6.1). При этом цилиндр 2 начинает скользить по основанию 1, вызывая вращение основания вокруг оси OZ. Движение цилиндра тормозится реакцией R(t) тормозного устройства 3, приложенной к внешней поверхности дна цилиндра. Величина реакции определяется по формуле (6.2). Моменты инерции основания и цилиндра относительно осей O1z1 и O2 z2 равны J1 и J2 соответственно. В начальном положении системы пружины K1M1, K2M2 не деформированы, а спиральная пружина поддерживает систему в состоянии статического равновесия. Составить дифференциальные уравнения движения системы и рассчитать конкретное движение на ЭВМ. Указание. В качестве обобщенных координат выбрать угол поворота j основания, отсчитанный от горизонтали, и координату S центра масс цилиндра на направляющей основания, отсчитанную от его начального положения Oн. Вариант 5. Твердое тело массой m1 закреплено в цилиндрическом шарнире C, который совершает горизонтальное перемещение, и опирается на вертикальную пружину KM. Координаты центра масс тела O1 в системе координат OX1Y1Z1, неизменно связанной с телом, равны x1O и y1O. Расстояние от точки С до точки K крепления пружины равно l1. Жесткость пружины KM равна C1. К шарниру прикреплена горизонтальная пружина CD жесткостью C2. Вращение тела относительно оси CZ1 удерживается спиральной пружиной жесткостью Cj, которая в начальном положении не деформирована. В начальный момент времени к твердому телу параллельно оси CX1 прикладывается нагрузка P(t), определяемая по формуле (6.1). Линия действия силы P удалена от оси CX1 на расстояние H = y2O. Начальное положение тела задается углом j0 между осью CX1 и горизонталью. В начальном положении пружина CD не деформирована и тело находится в положении статического равновесия. Момент инерции тела относительно оси O1 z1 равен J1. Составить дифференциальные уравнения движения системы и рассчитать конкретное движение на ЭВМ. Указание. В качестве обобщенных координат выбрать координату xc точки C, отсчитанную от положения статического равновесия пружины CD, и угол поворота j оси CX1, отсчитанный от горизонтали. Вариант 6. Полый цилиндр 2 массой m2 может вращаться вокруг оси O3Z3 шарнира, закрепленного на основании 1 массой m1. Основание закреплено в цилиндрическом шарнире O и опирается на вертикальную пружину KN с жесткостью С1. Вращение цилиндра относительно основания сдерживается спиральной пружиной с крутильной жесткостью Сj, а вращение основания относительно фундамента – спиральной пружиной с крутильной жесткостью Сq. В шарнирах O и O3 построены системы координат OXYZ и O3X3Y3Z3, оси OX и O3X3 которых горизонтальны, неизменно связаны с цилиндром и основанием. Расстояние от точки O3 до оси цилиндра h = 0,06 м. Размеры системы задаются, во-первых, координатами x3O = 3,3 м, y3O = 1,0 м точки O3 в системе координат OX1Y1Z1, во-вторых, координатами x2O = 0,7 м, y2O = 0,06 м центра масс цилиндра O2 в системе координат O3X2Y2Z2, в-третьих, координатами x1O = 3,2 м, y1O = 0,5 м центра масс основания 1 в системе координат OX1Y1Z1. Длина основания OK равна l1. Начальное положение системы задается углом q0 между осью OX1 и горизонталью и углом j0 между осью O3X2 и горизонталью. Моменты инерции основания и цилиндра относительно осей O1z1 и O2z2 равны J1 и J2 соответственно. Спиральная пружина в шарнире O в начальном положении не деформирована. При этом пружина в шарнире O3 и вертикальная пружина KN поддерживают систему в положении равновесия. В начальный момент времени к внутренней поверхности дна цилиндра прикладывается переменная нагрузка P(t), определяемая по формуле (6.1). При этом цилиндр начинает вращаться вокруг оси O3Z3, а основание – вокруг оси OZ1. Составить дифференциальные уравнения движения системы и рассчитать конкретное движение на ЭВМ. Указание. В качестве обобщенных координат выбрать уголq между осью OX1 и горизонталью и угол j между осью O3X2 и горизонталью O3X3. Момент, возникающий при деформации спиральной пружины в шарнире O3, вычисляется по формуле
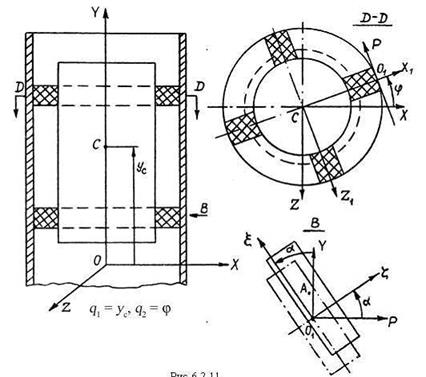
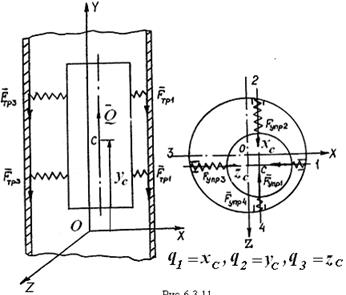
где b = j – q. Угол bн определяется из условия равновесия цилиндра в начальном положении. Вариант 7. Полый цилиндр 2 массой m2 скользит по горизонтальным направляющим, установленным на подвижном основании 1 массой m1. Основание закреплено на осях колес 3. Масса каждого из четырех колес m3, радиус колес R. Колеса представляют собой однородные диски. Движение цилиндра по основанию сдерживается пружиной жесткостью C1. Колеса катятся без скольжения по горизонтальным рельсам. На колеса основания действует момент сопротивления, пропорциональный их угловой скорости: M3 = –bw3. Вращение колес сдерживается спиральными пружинами с крутильной жесткостью Cq. Коэффициент трения при скольжении цилиндра по основанию равен f . Начальное положение цилиндра на основании задается координатой центра масс O2 цилиндра x22 = x2O в системе координат OX1Y1Z1, неизменно связанной с основанием и имеющей оси, параллельные осям неподвижной системы координат OXYZ. Пружины в начальном положении не деформированы. В начальный момент времени к внутренней поверхности дна цилиндра прикладывается переменная нагрузка P(t), определяемая по формуле (6.1). Записать дифференциальные уравнения движения системы и рассчитать конкретное движение на ЭВМ. Указание. В качестве обобщенных координат выбрать координату центра масс основания O1 на оси OX и координату x22 центра масс цилиндра O2 на оси O1X1. Можно полагать, что в начальный момент x1 = x1O = 0. Вариант 8. Полый цилиндр 2 массой m2 вращается вокруг неподвижной оси O3Z2 шарнира, закрепленного на основании 1 массой m1. Основание установлено на осях колес 3. Масса каждого из четырех колес m3, радиус колес R. Вращение цилиндра вокруг оси сдерживается спиральной пружиной с крутильной жесткостью Cj, а вращение колес – спиральными пружинами с крутильной жесткостью Cq. Колеса представляют собой однородные диски, катящиеся по прямолинейному рельсу без проскальзывания. В шарнире O3 введены промежуточная система координат O3X1Y1Z1, оси которой параллельны осям OXYZ неподвижной системы координат, и связанная с цилиндром система координат O3X2Y2Z2, ее ось O3X2 параллельна оси цилиндра. Центр масс цилиндра O2 лежит на его оси и имеет координаты x1O и y1O в системе координат O1X2Y2Z2. Момент инерции цилиндра относительно оси O2z2 равен J2. В начальном положении ось цилиндра составляет угол j0 относительно горизонтали и цилиндр находится в состоянии статического равновесия. В начальный момент времени к внутренней поверхности дна цилиндра прикладывается переменная нагрузка P(t), определяемая по формуле (6.1). Составить дифференциальные уравнения движения системы и рассчитать конкретное движение на ЭВМ. У к а з а н и е. В качестве обобщенных координат выбрать координату x1 точки O3, отсчитываемую от ее начального положения, и угол поворота jоси цилиндра, отсчитанный от горизонтали. Вариант 9. Полый цилиндр 2 массой m2 скользит по направляющим основания 1, закрепленного в цилиндрическом шарнире O. Масса основания m1. Основание в точках A и B опирается на вертикальные пружинные опоры жесткостью C1. Точки A и B удалены от опоры О на расстояние l1. Скольжение цилиндра по основанию сдерживается пружиной CD жесткостью C2. В точке О введены неподвижная система координат OXYZ, ось OX которой горизонтальна, и связанная с основанием система координат OX1Y1Z1. В начальный момент система координат OX1Y1Z1 совпадает с OXYZ, причем OX1 проходит через точки A и B. Моменты инерции основания и цилиндра относительно осей O1z1 и O2z2, проходящие через центры их масс, равны J1 и J2 соответственно. Центр масс основания O1 имеет координаты x1O и y1O в системе координат OX1Y1Z1. Ось цилиндра O2X2 удалена на расстояние y2O от оси OX1. Начальное положение цилиндра на направляющих основания определяется из условий статического равновесия системы в начальном положении. При этом пружины не деформированы. Коэффициент трения при скольжении цилиндра по основанию f = 0,12. В начальный момент времени к внутренней поверхности дна цилиндра прикладывается переменная нагрузка P(t) (6.1). Это вызывает скольжение цилиндра по основанию и вращение основания вокруг оси OZ. Составить дифференциальные уравнения движения системы и рассчитать конкретное движение на ЭВМ. Указание. В качестве обобщенных координат выбрать угол q отклонения оси OY1 от вертикали и координату x2О центра масс цилиндра O2 на направляющей основания OX1. Вариант 10. Полый цилиндр 2 массой m2 способен вращаться вокруг оси шарнира O3, неподвижно закрепленного на основании 1, опирающемся на цилиндрический шарнир O. Масса основания m1. Основание в точках A и B опирается на вертикальные пружинные опоры жесткостью C1. Точки A и B удалены от опоры О на расстояние l1. Вращение цилиндра относительно основания сдерживается спиральной пружиной с крутильной жесткостью Cj. В точке О введены неподвижная система координат OXYZ, ось OX которой горизонтальна, и связанная с основанием система координат OX1Y1Z1, ее оси в начальном положении совпадают с осями OXYZ, причем ось OX1 проходит через точки A и B. Центр масс основания O1 имеет координаты x1O = – 0,1 м и y1O в системе координат OX1Y1Z1. В точке O3 введены неподвижная система координат O3X3Y3Z3, оси которой параллельны осям OXYZ, и связанная с цилиндром система координат O3X2Y2Z2, ее ось O3X2 параллельна оси цилиндра. Центр масс цилиндра O2 имеет координаты x2O и y1O в системе координат O3X2Y2Z2, причем координата y2O задана, а координата x2O определяется из условий статического равновесия системы в начальном положении. Предполагается, что в начальном положении ось OX1 горизонтальна, ось O3X2 составляет угол j0 с горизонтом, а пружины в опорах A, B не деформированы. В начальный момент система координат OX1Y1Z1 совпадает с OXYZ. Моменты инерции основания и цилиндра относительно осей O1z1 и O2z2 равны J1 и J2 соответственно. Составить дифференциальные уравнения движения системы и рассчитать конкретное движение на ЭВМ. Указание. В качестве обобщенных координат выбрать угол q отклонения оси OY1 от вертикали и угол jотклонения оси O3X2 от горизонтали. Момент, развиваемый спиральной пружиной, определяется по формуле (6.3). Вариант 11. Цилиндрическое твердое тело массой m1 движется внутри неподвижной цилиндрической трубы под действием выталкивающей силы Q(t) так, что ось тела совпадает с осью трубы. При этом тело вращается вокруг своей оси симметрии. На теле закреплены два пояса одинаковых упругих амортизаторов по n = 40 амортизаторов в каждом. Опорные поверхности амортизаторов, имеющие форму прямоугольника, в процессе движения тела скользят по поверхности трубы. При этом на амортизатор действует сила трения, направленная в сторону, противоположную скорости центра симметрии А опорной поверхности. Коэффициент трения скольжения зависит от скорости центра симметрии опорной поверхности амортизатора относительно трубы и определяется по формуле
где A, C, D – заданные постоянные,
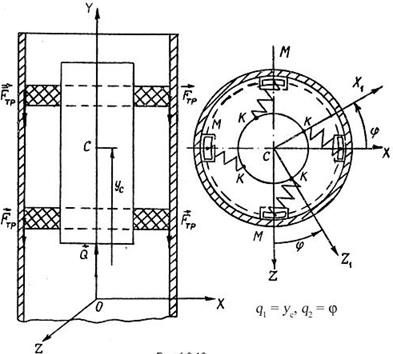
где A1, A2, k1, k2– заданные постоянные. Точка O1 представляет собой начальное положение центра симметрии опорной поверхности. В процессе движения положение точки O1 в системе отсчета, связанной с движущимся телом, не изменяется. Радиус трубы R = 1 м. Выталкивающая сила Q(t)определяется по формуле Q(t) = B1t2 + B2t + B3, (6.5) где значение постоянных B1 = -1,5×106 H/c 2; B2=6,0×106H/c; Составить дифференциальные уравнения движения системы и рассчитать конкретное движение на ЭВМ. У к а з а н и е. В качестве обобщенных координат выбрать координату yС центра масс тела на вертикальной оси, отсчитанную от начального положения центра масс, и угол поворота j тела относительно оси симметрии, отсчитанный от начального положения тела. Вариант 12. Цилиндрическое твердое тело массой m1 движется внутри неподвижной цилиндрической трубы под действием выталкивающей силы Q(t) так, что ось тела совпадает с осью трубы. На теле закреплены два пояса одинаковых упругих амортизаторов по четыре амортизатора в каждом. Их масса пренебрежимо мала. Амортизаторы способны не деформироваться при движении тела в плоскости, перпендикулярной оси трубы. При этом к направляющим трубы в точке М со стороны опорной поверхности амортизатора и к поверхности тела в точке К его крепления прикладывается сила реакции, нелинейно зависящая от удлинения амортизатора,
где C1, C3 – коэффициенты жесткости амортизатора. Направляющие опорных поверхностей амортизаторов препятствуют перемещению этих поверхностей во всех направлениях, кроме направления, параллельного оси OY. Деформацией амортизаторов в плоскости осевого сечения трубы можно пренебречь. Это позволяет считать, что силы трения, приложенные к опорным реакциям поверхностей амортизаторов со стороны поверхностей направляющих, коаксиальных оси трубы, равны составляющим реакций амортизаторов, приложенным к телу в точках крепления К в направлении, параллельном оси OY. Коэффициент трения скольжения зависит от скорости движения опорной поверхности амортизатора и определяется по формуле (6.4). Начальное положение тела задается величиной угла поворота j. Удлинение амортизаторов в случае, когда точки М и К лежат на одном диаметре, равно Составить дифференциальные уравнения движения системы и рассчитать конкретное движение на ЭВМ. Указание. В качестве обобщенных координат выбрать координату yС центра масс тела на оси OY и угол j поворота тела вокруг оси OY. Схемы конструкций и исходные данные Предлагаются варианты задач по расчету динамики механических систем с тремя и более степенями свободы. Задачи предназначены для проведения учебной научно-исследовательской работы. Программирование расчета динамики систем проводится студентами самостоятельно под руководством преподавателя.
Рис. 6.3
Рис. 6.3. Продолжение
Рис. 6.3. Продолжение
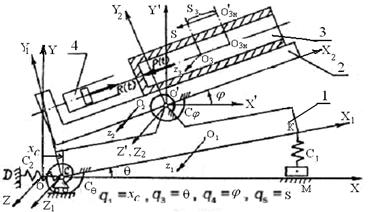
Вариант 1. Взяв за основу механическую систему варианта 5 (рис. 6.2) курсовой работы, полагаем дополнительно, что к шарниру C прикреплена еще и вертикальная пружина CE жесткостью C3. К обобщенным координатам, указанным на рис. 6.2, вар.5, добавить координату yС точки C на вертикальной оси, отсчитанную от положения статического равновесия пружины CE. Рекомендуемые значения постоянных приведены в табл. 6.3. Вариант 2. Взяв за основу механическую систему варианта 2 (рис. 6.2) курсовой работы, полагаем дополнительно, что к шарниру C прикреплена горизонтальная пружина CD с жесткостью C2. В начальном положении пружина CD не деформирована и система находится в состоянии статического равновесия. К обобщенным координатам, указанным на рис.6.2, добавить координату xС точки C на горизонтальной оси, отсчитанную от положения статического равновесия пружины CD. Вариант 3. Взяв за основу механическую систему варианта 2 (рис. 6.3) курсовой работы, полагаем дополнительно, что к шарниру C прикреплена вертикальная пружина CE жесткостью C3. К обобщенным координатам, указанным в вар. 2, добавить координату yС точки C на вертикальной оси, отсчитанную от положения статического равновесия пружины CE. Рекомендуемые значения постоянных приведены в табл. 6.3. Вариант 4. Взяв за основу механическую систему варианта 6 (рис. 6.2) курсовой работы, полагаем дополнительно, что к шарниру C прикреплена горизонтальная пружина CD жесткостью C2. В начальном положении пружина CD не деформирована и система находится в состоянии статического равновесия. К обобщенным координатам, указанным на рис. 6.2, вар. 6, добавить координату xС шарнира C на горизонтальной оси, отсчитанную от положения статического равновесия пружины CD. Вариант 5. Полый цилиндр 3 массой m3 скользит по направляющей 2 массой m2, способной вращаться вокруг цилиндрического шарнира О′, закрепленного на основании 1 массой m1. Основание закреплено в цилиндрическом шарнире C и опирается на вертикальную пружину KM с жесткостью C1. Длина недеформированной пружины lн, расстояние от шарнира С до точки K опоры пружины l1. Коэффициент трения скольжения при движении цилиндра по направляющей 2f. Вращение направляющей относительно основания удерживается спиральной пружиной с крутильной жесткостью Cj. Вращение
Поиск по сайту: |
 0, м
0, м
 . В начальном положении механизм находится в состоянии статического равновесия и пружина деформирована. Введем неподвижную систему координат OXYZ так, чтобы ось OX была горизонтальна, и связанную с основанием систему координат OX1Y1Z1, ее ось OX1 параллельна оси цилиндра и направляющим основания, по которым скользит цилиндр. Центр масс основания O1 в системе координат OX1Y1Z1 имеет координаты x1О и y1O. Начальное положение Oн центра масс цилиндра O2 определяется координатами x2O и y2Oточки Oн в системе координат OX1Y1Z1.
. В начальном положении механизм находится в состоянии статического равновесия и пружина деформирована. Введем неподвижную систему координат OXYZ так, чтобы ось OX была горизонтальна, и связанную с основанием систему координат OX1Y1Z1, ее ось OX1 параллельна оси цилиндра и направляющим основания, по которым скользит цилиндр. Центр масс основания O1 в системе координат OX1Y1Z1 имеет координаты x1О и y1O. Начальное положение Oн центра масс цилиндра O2 определяется координатами x2O и y2Oточки Oн в системе координат OX1Y1Z1. (6.1)
(6.1)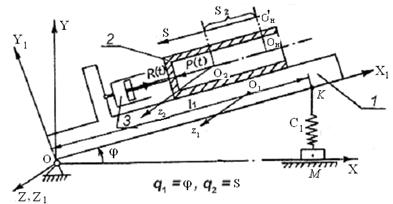
 (6.2)
(6.2) , (6.3)
, (6.3) , (6.4)
, (6.4) – скорость точки A. Сила нормального давления амортизатора на поверхность трубы постоянна и равна N. Амортизаторы установлены и движутся так, что ось симметрии опорной поверхности O1x составляет одинаковый для них всех и не меняющийся при движении угол a = 0,03 с образующей цилиндрической поверхности трубы. В процессе движения центр симметрии A опорной поверхности совершает малые гармонические колебания в плоскости опорной поверхности так, что производные координаты точки A в системе координат O1 xz задаются зависимостями
– скорость точки A. Сила нормального давления амортизатора на поверхность трубы постоянна и равна N. Амортизаторы установлены и движутся так, что ось симметрии опорной поверхности O1x составляет одинаковый для них всех и не меняющийся при движении угол a = 0,03 с образующей цилиндрической поверхности трубы. В процессе движения центр симметрии A опорной поверхности совершает малые гармонические колебания в плоскости опорной поверхности так, что производные координаты точки A в системе координат O1 xz задаются зависимостями
 ,
,