|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
РЕГУЛИРОВАНИЕ СКОРОСТИ АД В КАСКАДНЫХ СХЕМАХ ВКЛЮЧЕНИЯ ⇐ ПредыдущаяСтр 6 из 6
Ранее было отмечено, что регулирование скорости АД при использовании ряда способов (реостатного, с помощью ТПН и др.) сопровождается выделением в цепи ротора потерь скольжения В связи с этим появляется стремление использовать энергию скольжения для совершения полезной работы. Первые схемы, в которых полезно использовались потери скольжения, создавались путем специального соединения АД с другими электрическими машинами. Поэтому эти схемы получили название каскадных. В настоящее время существуют схемы, использующие энергию скольжения АД без добавочных вращающихся электрических машин, а с помощью полупроводниковых приборов и трансформаторов. Однако эти схемы также называются каскадными. В общем случае каскадными называют такие схемы включения АД, которые, обеспечивая регулирование его скорости, позволяют одновременно полезно использовать энергию скольжения. По способу использования энергии скольжения различают две принципиально разные схемы. Первая из них показана на рис 4.34, а. Асинхронный двигатель с фазным ротором потребляет из сети мощность P1. Большая ее часть в виде механической мощности Рм отдается рабочей машине, а некоторая часть в виде мощности скольжения DРм поступает на вход преобразователя П (его реализация будет рассмотрена далее). Преобразователь П преобразует мощность скольжения при частоте f2=f1s в мощность Рэл,с при частоте f1 и отдает ее в сеть. Отдаваемая в сеть мощность
где DРп – потери в преобразователе; DР2эл – электрические потери в обмотке ротора АД. На рис. 4.34, б представлена другая схема полезного использования энергии скольжения. Для этого в схеме кроме преобразователя П используется вспомогательный двигатель ВМ, находящийся на одном валу с основным АД. Мощность скольжения в этом случае за вычетом потерь в роторе, преобразователе и двигателе ВМ поступает на вал в виде механической мощности Рв,м
где DРв,м – потери во вспомогательном двигателе. Если пренебречь потерями в каскадной схеме, то можно установить, что рабочей машине РМ передается вся электромагнитная мощность Рэм. Действительно, на вал от АД поступает мощность Рм=Р2=Мw, от двигателя ВМ – мощность Рв,м=DР2= Мw0s, в результате суммарная механическая мощность на валу каскада Каскады, реализуемые по схеме рис 4.34, а, в которой энергия скольжения возвращается в питающую сеть, называются электрическими. Каскады, соответствующие схеме рис. 4.34, б, в которой энергия скольжения возвращается на вал основного АД, называются электромеханическими. В зависимости от вида используемых в каскадных установках устройств различают машинные, машинно-вентильные и вентильные каскады. Первый вид каскадных схем – машинный – реализуется с помощью только электрических машин – одноякорных преобразователей, синхронных машин, коллекторных машин переменного тока. Машинные ; каскады исторически появились раньше всех других каскадных установок. С развитием электронной техники стало возможным реализовать преобразователь с использованием управляемых и неуправляемых полупроводниковых вентилей. В результате этого появились машинно-вентильные и вентильные каскадные схемы, которые и рассматриваются далее как наиболее перспективные и обладающие более высокими технико-экономическими показателями по сравнению с машинными. Для пояснения принципов регулирования скорости и полезного использования энергии скольжения обратимся к рис 4.35, на котором представлены три схемы роторной цепи АД. В схеме рис. 4.35, а в цепь ротора включен дополнительный резистор R2д, в схеме рис 4.35, б – ЭДС переменного тока Е~, а в схеме рис. 4.35, б – ЭДС постоянного тока Е=, подсоединенная к выводам выпрямительного моста V, обеспечивающего выпрямление ЭДС ротора. Регулируя R2д, Е~, Е=, можно изменять ток в роторе двигателя, а тем самым его момент и скорость. Однако если в схеме рис. 4.35, а это регулирование сопровождается расходованием энергии скольжения на нагрев резистора R2д, то в схемах рис 4.36, б и в эта энергия потребляется источниками ЭДС и может быть полезно использована.
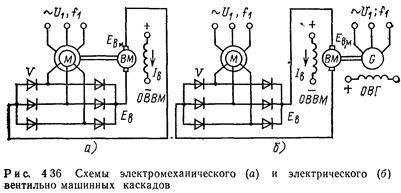
На рис. 4.36, а и б приведены схемы машинно-вентильных электромеханического и электрического каскадов. В роторную цепь АД включается трехфазный выпрямительный мост V, собранный из полупроводниковых вентилей. К выводам моста V подсоединен якорь вспомогательного ДПТ независимого возбуждения, ЭДС якоря которого Ев,м направлена навстречу ЭДС выпрямителя Ев. В результате такого соединения энергия скольжения переменного тока частоты f2 выпрямителем V преобразуется в энергию постоянного тока, которая поступает на вспомогательную машину ВМ и преобразуется в ней в механическую энергию. Далее в электромеханическом каскаде (рис. 4.36, а) она возвращается на вал основного АД, а в электрическом каскаде с помощью синхронного генератора G – в питающую сеть переменного тока частоты f1. Регулирование скорости машинно-вентильных каскадов происходит за счет изменения ЭДС Ев,м вспомогательного двигателя ВМ, которое осуществляется регулированием его тока возбуждения Iв. Рассмотрим процесс регулирования скорости в каскадных схемах подробнее.
Предположим, что при работе электропривода в установившемся режиме происходит увеличение тока возбуждения Iв. Это повлечет за собой увеличение ЭДС Ев,м и уменьшение выпрямленного тока Id, который определяется выражением
где RS – суммарное активное сопротивление цепи выпрямленного тока. Уменьшение Id и тем самым тока ротора АД вызовет снижение его электромагнитного момента, который станет меньше момента нагрузки Мс. В результате этого скорость двигателя начнет снижаться, а его скольжение и ЭДС роторной обмотки Е2=Е2кs начнут возрастать. Увеличение ЭДС ротора приведет к увеличению тока ротора и тем самым момента АД, который вновь станет равным моменту нагрузки, и скорость АД перестанет изменяться. Двигатель опять будет работать в установившемся режиме, но уже при более низкой скорости. На рис. 4.37, а, б приведены механические характеристики соответственно электромеханического и электрического каскадов при различных токах возбуждения вспомогательного двигателя ВМ. Для механических характеристик электромеханического каскада рис. 4.36, а характерно возрастание максимального момента по мере снижения скорости каскада, поскольку по мере увеличения тока возбуждения ВМ его момент также возрастает. При этом максимальная механическая мощность каскада, определяемая произведением максимального момента на соответствующую этому моменту скорость, при разных токах возбуждения ВМ примерно одинакова. Поэтому электромеханический каскад называют каскадом постоянной мощности.
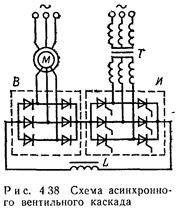
Механические характеристики электрического каскада приведены на рис. 4.37, б. При токе возбуждения ВМ, близком к нулю, механическая характеристика каскада близка к естественной характеристике основного АД. По мере увеличения тока возбуждения искусственные характеристики располагаются ниже естественных, причем номинальному току возбуждения Iв,ном соответствует самая низкая характеристика. Максимальный момент каскада, определяемый только основным АД, сохраняется на разных характеристиках примерно постоянным. Поэтому электрический каскад называют каскадом постоянного момента. В настоящее время в связи с широким развитием и распространением силовой полупроводниковой аппаратуры, в частности тиристоров, повсеместно наблюдается тенденция заменять электромашинные вращающиеся преобразователи энергии на статические ПЧ. В частности, электромашинный агрегат ВМ–G на рис. 4.36, б представляет собой преобразователь энергии постоянного тока, поступающей от выпрямителя V, в энергию переменного тока, отдаваемую в сеть. Такой машинный агрегат может быть заменен на статический ПЧ энергии, состоящий из трансформатора Т и инвертора И, как показано на рис. 4.38. Принципы действия схем, приведенных на рис. 4.38 и 4 36, б, аналогичны.
Инвертор, как уже отмечалось, представляет собой преобразователь энергии постоянного тока в энергию переменного тока. Электродвижущую силу инвертора можно регулировать аналогично тому, как регулируется ЭДС ДПТ. Поэтому механические характеристики асинхронного каскада по схеме рис. 4.38 аналогичны характеристикам вентильно-машинного электрического каскада по схеме рис. 4.36, б и подобны приведенным на рис. 4.37, б. В схеме рис. 4.38 в роторную цепь АД включены полупроводниковые неуправляемые вентили выпрямителя В и управляемые вентили инвертора И, а также реактор L (катушка индуктивности), который служит для сглаживания пульсаций выпрямленного тока. Асинхронный электропривод по схеме рис 4.38 получил название асинхронного вентильного каскада. Существует еще много схем асинхронных вентильных каскадов, аналогичных представленным на рис. 4.38. Эти схемы несколько отличаются по своей сложности, техническим возможностям регулирования скорости, энергетическим показателям и т. д. Однако принцип действия и назначение этих схем и схемы рис. 4.38 аналогичны: использование энергии скольжения для совершения полезной работы и возможность плавного регулирования скорости АД. Отметим основные показатели регулирования скорости АД в каскадных схемах включения. Практический диапазон регулирования скорости в каскадных схемах обычно не превышает двух. Вызвано это тем обстоятельством, что по мере роста диапазона регулирования скорости и тем самым скольжения АД требуется увеличивать установленную мощность всех устройств в роторной цени АД. Так, при диапазоне, равном двум, установленная мощность машинно-вентильного электрического каскада составляет 250%, из них: основной АД–100%, выпрямитель, вспомогательный двигатель и синхронный генератор – по 50 %. Плавность регулирования скорости в каскадных схемах достаточно высокая, что достигается плавным изменением ЭДС ПЧ. При каскадном регулировании скорости коэффициент мощности привода относительно невелик, что вызывает необходимость применения компенсирующих устройств, например конденсаторов. Следует отметить также, что в каскадных схемах включения критический момент АД снижается на 15–17 % по сравнению с критическим моментом основной схемы включения. В целом каскадный способ является экономичным способом регулирования скорости АД. Специальные каскадные установки позволяют регулировать скорость АД не только вниз от синхронной, но и выше ее, при этом получается выигрыш в габаритах преобразовательных устройств – трансформатора и вентильного преобразователя. Такие каскадные установки называют установками с двухзонным регулированием. Однако каскады с двухзонным регулированием дороже и сложнее установок, собранных по схеме рис. 4.38.
Поиск по сайту: |
 что значительно снижает технико-экономические показатели асинхронного электропривода. При мощности электропривода в несколько сотен или тысяч киловатт потери скольжения становятся весьма большими по абсолютному значению.
что значительно снижает технико-экономические показатели асинхронного электропривода. При мощности электропривода в несколько сотен или тысяч киловатт потери скольжения становятся весьма большими по абсолютному значению. (4.43)
(4.43)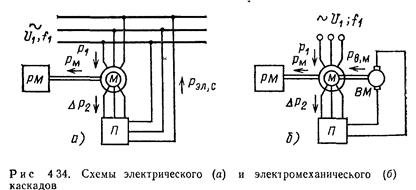
 (4.44)
(4.44) . Вследствие этого каскады, реализованные по схеме рис. 4.34, б, называют каскадами постоянной мощности.
. Вследствие этого каскады, реализованные по схеме рис. 4.34, б, называют каскадами постоянной мощности.
 (4.45)
(4.45)