|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
РЕГУЛИРОВАНИЕ СКОРОСТИ АД ИЗМЕНЕНИЕМ ЧИСЛА ПАР ПОЛЮСОВ
Этот способ используется для регулирования скорости многоскоростных АД с короткозамкнутым ротором. Возможность получения искусственных характеристик АД данным способом, и следовательно, регулирования его скорости, непосредственно следует из выражения для угловой скорости магнитного поля АД Изменение числа пар полюсов АД р производится за счет переключений в обмотке статора, при этом число пар полюсов короткозамкнутого ротора изменяется автоматически. Так как количество полюсов АД может быть равным только целому числу – 1, 2, 3 и т. д., то следовательно, данный способ обеспечивает только ступенчатое регулирование скорости. Двигатели, допускающие регулирование скорости этим способом, получили название многоскоростных. Изменение числа полюсов АД достигается, когда на статоре АД располагаются две (или больше) не связанные друг с другом обмотки, имеющие разное число пар полюсов p1 и p2. При подключении к сети одной обмотки, например с p1 парами полюсов, АД имеет синхронную скорость
Вторая обмотка при этом обесточена. Для получения другой скорости отключается первая обмотка и подключается на сеть вторая обмотка с p2 парами полюсов, при этом синхронная скорость АД станет равной
и АД будет иметь уже другую механическую характеристику. Наряду с такими АД, получившими название многообмоточных, широкое распространение получил другой тип многоскоростных АД, у которых изменение числа пар полюсов вращающегося магнитного поля достигается за счет изменения схемы соединения статорной обмотки АД. Для этого каждая фаза статора разделена на несколько одинаковых частей (чаще всего на две части) и имеет от них соответствующее число выводов. Рассмотрим принцип получения различного числа пар полюсов при переключении частей обмотки статора на следующем упрощенном примере. На рис. 4.9 показана схема одной фазы статорной обмотки, которая состоит из двух одинаковых частей 1н–1 к, 2н–2к, имеющих два проводника. Если секции соединены так, как это показано на рис. 4.9, а, и к обмотке статора подведен ток I, имеющий в данный момент времени направление, показанное стрелками, то образуется магнитное поле с четырьмя полюсами, т. е. р=2 (направление магнитных силовых линий определяем с помощью правила буравчика).
Оставив направление тока тем же,, изменим несколько схему соединения обмотки, подключив конец первой секции 1к к концу второй 2к (рис. 4.9, б). Из рис. 4.9, б следует, что в этом случае статорная обмотка образует магнитное поле с числом пар полюсов, вдвое меньшим по сравнению с полем рис. 4.9, а. Уменьшение вдвое числа пар полюсов достигается и в схеме рис. 4.9, в, где секции соединены параллельно (1н с 2к, 1к с 2н). В том и другом случае (рис. 4.9, б и в) уменьшение числа пар полюсов, и следовательно, увеличение скорости, АД, достигается изменением направления тока на противоположное в одной из секций (в данном случае во второй). При этом диапазон изменения угловой скорости магнитного поля равен двум. Наиболее часто на практике встречаются две схемы переключения статорной обмотки многоскоростных АД: 1) с треугольника (Д) на двойную звезду (УУ); 2) со звезды (У) на двойную звезду (УУ). Рассмотрим схемы соединения статора и механические характеристики АД для этих случаев. Треугольник – двойная звезда. Для получения большего числа пар полюсов pi секции каждой фазы статора включены в треугольник согласно, т. е. так, как это показано на рис. 4.10, а, где А1н и А2н –начала соответственно первой и второй секций фазы А; А1к и А2к – их концы. Обозначения для выводов секций фаз В и С, схемы включения которых аналогичны схемам фазы А, опущены. Соединение секций по схеме рис. 4.10, б, как отмечалось выше, вызовет уменьшение в 2 раза числа пар полюсов АД. Схема рис. 4.10, б получила название двойной звезды. Для получения общего вида механических характеристик определим допустимую мощность АД при включении его статора по схемам рис. 4.10, а и б. Учитывая, что допустимый ток в секции обмотки статора I1доп=I1ном остается неизменным при переключении числа пар полюсов, допустимую первичную мощность определим: для схемы треугольник (рис. 4.10, а)
для схемы двойная звезда (рис. 4.10, б)
Из полученных выражений следует, что при Звезда – двойная звезда. В этой схеме меньшей угловой скорости АД соответствует соединение обмоток статора, показанное на рис. 4.11, а. Секции фаз статора соединены в этой схеме также последовательно и согласно и образуют при подключении АД к сети систему p1 пар полюсов вращающегося магнитного поля, которой соответствует синхронная скорость w01.
Переключение на двойную звезду осуществляется по схеме на рис. 4.10, б, при этом число пар полюсов станет p2=p1/2. Получаемые механические характеристики такого двухскоростного АД изображены на рис. 4.11, б. В отличие от рассмотренной выше схемы переключения треугольник – двойная звезда, в которой регулирование скорости АД осуществляется при постоянной мощности нагрузки на его валу, в этой схеме изменение скорости может осуществляться при постоянном моменте нагрузки Мс. Это следует из рассмотрения выражений допустимой мощности АД, которая для схемы двойная звезда (рис. 4.10, б) определяется формулой (4.23), а для схемы звезда согласно рис 4.11, а – формулой
Из (4.23) и (4.24) видно, что допустимая мощность при переключении статорной обмотки на меньшее число пар полюсов (когда скорость АД увеличивается в 2 раза) возрастает также в 2 раза. Тем самым допустимые моменты при работе АД в обеих схемах включения примерно одинаковы и характеристики имеют показанный на рис. 4.11, б вид. Помимо рассмотренных двухскоростных АД применяются также трех- и четырехскоростные АД. Первые из них помимо переключаемой обмотки статора, выполняемой аналогично рассмотренной выше, имеют также и одну непереключаемую обмотку. Четырехскоростные АД с различным числом пар полюсов p1, p2, p3, p4 позволяют получить четыре различные механические характеристики. Рассматриваемый способ регулирования скорости характеризуется рядом положительных показателей, что определяет широкое его применение в регулируемом электроприводе переменного тока. К ним в первую очередь следует отнести экономичность регулирования, так как регулирование скорости изменением числа пар полюсов не сопровождается выделением в роторной цепи больших потерь энергии скольжения, вызывающих излишний нагрев АД и ухудшающих его КПД. Из рис. 4.10, в и 4.11, б видно, что механические характеристики многоскоростных асинхронных электродвигателей отличаются хорошей жесткостью и достаточной перегрузочной способностью.
Недостатком этого способа является ступенчатость изменения скорости двигателя и относительно небольшой диапазон ее регулирования, не превышающий обычно 6–8. На рис 4.12 показана практическая схема управления двухскоростным АД с короткозамкнутым ротором. Схема обеспечивает две скорости АД путем соединения обмотки статора в треугольник или двойную звезду, а также его реверсирование. Она состоит из контакторов большой КМ1 и малой КМ2 скорости, линейных контакторов направления вращения АД «Вперед» КМЗ и «Назад» КМ4, блокировочного реле KV и кнопок управления SB3, SB1, SB2, SB4, SB5. Защита электропривода осуществляется тепловыми реле КК1 и КК2 и предохранителями FA. Для пуска АД, например, на низкую скорость нажимается кнопка SB4, после чего срабатывает контактор КМ2 и реле KV. Статор АД оказывается включенным по схеме треугольник, а реле KV, замкнув свои контакты в цепях аппаратов КМЗ и КМ4, подготавливают двигатель к подключению к сети. Далее нажатие кнопки SB1 или SB2 приводит к включению АД соответственно в направлении «Вперед» или «Назад». После разбега АД до низкой скорости может быть осуществлен его разгон до высокой скорости. Для этого должна быть нажата кнопка SB5, что приведет к отключению контактора КМ2 и включению контактора КМ1 и пересоединению в результате этого обмотки статора со схемы треугольник на схему двойная звезда. Остановка АД производится нажатием кнопки SB3, после чего он отключается от сети и схема возвращается в исходное положение. Применение двухцепных кнопок в схеме позволяет осуществить блокировку от одновременного срабатывания контакторов КМ1 и КМ2, КМЗ и КМ4. Этой же цели служат включенные в цепи катушек этих контакторов размыкающие блокировочные контакты КМ1, КМ2, КМЗ, КМ4. 4.5. РЕГУЛИРОВАНИЕ КООРДИНАТ ЭЛЕКТРОПРИВОДА В СИСТЕМЕ ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ–ДВИГАТЕЛЬ а) Схема включения и характеристики АД Одним из возможных способов регулирования координат АД является изменение напряжения на выводах его статора, при этом частота такого напряжения постоянна и равна частоте сети переменного тока. На рис. 4.13, а приведена схема электропривода при реализации этого способа. Между выводами питающей сети и статора АД включен преобразователь напряжения, при использовании которого может изменяться напряжение, подводимое к статору АД.
Возможность регулирования координат АД с помощью изменения напряжения следует из анализа формулы (4.7), согласно которой путем регулирования фазного напряжения Uф можно изменять критический (максимальный) момент АД и получать тем самым искусственные характеристики. Критическое скольжение АД и его синхронная скорость от напряжения не зависят и остаются неизменными при его регулировании. На рис. 4.13, б приведены механические характеристики АД при регулировании напряжения на выводах его статора. Как видно из этих графиков, получаемые искусственные характеристики оказываются малопригодными для целей регулирования скорости, так как по мере уменьшения напряжения резко снижаются критический момент АД и его перегрузочная способность, а диапазон регулирования скорости очень мал. По этим причинам разомкнутая схема рис 4.13, а может использоваться лишь для регулирования момента АД и его тока, который в соответствии с формулой (4.1) пропорционален напряжению статора. Для регулирования скорости АД создаются замкнутые системы, одна из которых рассмотрена ниже. б) Система тиристорный преобразователь – двигатель Для регулирования напряжения на выводах статора АД могут использоваться различные устройства – автотрансформаторы, магнитные усилители и тиристорные преобразователи напряжения (ТПН). Последний вид регуляторов напряжения – ТПН получил в настоящее время наибольшее распространение и серийно выпускается промышленностью [41]. Определяется это рядом достоинств ТПН. высоким КПД, простотой в обслуживании, легкостью автоматизации работы электропривода. На рис 4.14, а приведена силовая часть схемы регулирования напряжения на однофазной нагрузке Zн. Если на тиристоры VS1 и VS2 не подаются импульсы управления от СИФУ (на схеме не показана), то они закрыты и напряжение на нагрузке Uн равно нулю. При подаче на тиристоры импульсов управления в момент их естественного открытия (угол управления a=0) они будут полностью открыты и к нагрузке будет приложено все напряжение сети U1. Если осуществлять подачу импульсов управления на тиристоры с некоторой задержкой относительно момента естественного открытия (угол управления a¹0), то к нагрузке будет прикладываться часть напряжения сети. Изменяя угол управления a от нуля до p, можно регулировать напряжение на нагрузке от полного напряжения сети до нуля.
Существенно отметить, что форма напряжения на нагрузке является несинусоидальной. Несинусоидальное напряжение можно представить как совокупность нескольких синусоидальных напряжений, каждое из которых изменяется с определенной частотой. Из приведенных рассуждений вытекает следующий вывод: кривую напряжения на нагрузке при работе схемы рис 4.14, а можно разложить на отдельные составляющие, причем частота изменения первой из них равна частоте питающего напряжения, а частоты других составляющих больше, чем первой. Указанная первая составляющая называется 1-й или основной гармоникой, а все другие составляющие называются высшими гармониками. Обычно 1-я гармоника имеет наибольшую амплитуду и по ней ведутся все основные расчеты. Показанное на рис 4.14, а соединение тиристоров называется встречно-параллельным. Оно обеспечивает поочередную работу каждого из тиристоров в течение одного полупериода частоты сети. Такие пары встречно-параллельно соединенных тиристоров используются и для регулирования напряжения трехфазного АД. Отметим, что иногда вместо такой пары тиристоров используется симметричный тиристор (симистор), обеспечивающий такой же принцип действия преобразователя напряжения. На рис. 4.14, б приведена практическая схема управления АД с помощью ТПН, состоящего из трех пар встречно-параллельно соединенных тиристоров, каждая из которых включена между фазой сети и фазой статора АД. Регулирование напряжения на АД в этой схеме осуществляется, как и в схеме на рис. 4.14, а, изменением угла управления, т. е. сдвигом во времени управляющих импульсов, подаваемых на управляющие электроды тиристоров. Управляющие импульсы подаются на все тиристоры не одновременно, а со сдвигом во времени на третью часть периода частоты сети. Это определяется тем, что управляющий импульс каждого тиристора должен быть сдвинут относительно напряжения той фазы сети, к которой подключен тиристор, на один и тот же угол управления a, a фазные напряжения сети сдвинуты относительно друг друга на 120°. При изменении угла управления a изменяется напряжение на фазах АД аналогично тому, как это было рассмотрено для однофазной цепи, а именно: при увеличении угла a амплитуда 1-й гармоники напряжения уменьшается. На рис. 4.14, б приведены механические характеристики АД, каждая из которых соответствует одному значению угла управления a. Эти характеристики аналогичны показанным на рис. 4.13, б, соответствующим случаю питания АД от идеального источника изменяющегося синусоидального напряжения. Возникающие на выходе ТПН высшие гармоники напряжения оказывают определенное влияние на работу АД. В частности, каждая гармоника напряжения определяет прохождение дополнительного тока в обмотках АД, который вызывает соответствующие дополнительные потери в обмотках. Анализ показывает, что при питании АД от ТПН по схеме рис. 4.14, б потери на 10–20 % больше, чем при питании АД от источника изменяющегося синусоидального напряжения. Вместе с тем следует отметить, что высшие гармоники напряжения оказывают незначительное влияние на момент АД. Как уже отмечалось, характеристики, приведенные на рис. 4.14, в, мало удовлетворяют целям регулирования скорости АД. Из графиков следует, что с увеличением угла управления a снижается критический момент АД и падает жесткость его механических характеристик. Вследствие этого при возможных колебаниях момента сопротивления механизма Мс скорость его движения может резко измениться, что в большинстве случаев недопустимо. Действительно, пусть, например (рис. 4.14, в), момент сопротивления на валу АД равен Mc1. Если угол управления a равен 75°, то рабочая точка электропривода находится в положении 1. Предположим, что по каким-то причинам увеличился момент нагрузки на валу АД до значения Mc2. Двигатель при этом начнет замедляться и в конечном итоге остановится, так как его критический момент меньше момента сопротивления Mc2. В то же время по условиям производственного процесса допустимо уменьшение угловой скорости только до значения w2. Очевидно, что для выполнения этого требования должен быть уменьшен угол a до 60°, при этом момент АД увеличится и рабочая точка электропривода переместится в положение 2. Высказанные соображения показывают, что для получения благоприятных механических характеристик АД, управляемого с помощью ТПН, необходимо регулировать угол a в зависимости от изменения момента Мс нагрузки. Такое регулирование можно осуществить вручную, когда за работой электропривода наблюдает оператор, который при недопустимых колебаниях скорости производственного механизма регулирует положение определенной рукоятки управления, изменяющей угол a. Однако наиболее просто и с лучшими результатами эти функции могут выполнить системы автоматического регулирования, которые без участия человека обеспечивают поддержание скорости АД на заданном уровне. Рассмотрим для примера принцип действия широко распространенной системы автоматического регулирования скорости АД с контактными кольцами, в которой используется обратная связь по скорости АД. Принципиальная электрическая схема этой системы показана на рис. 4.15, а. Между выводами сети и статора АД включены три пары встречно-параллельно соединенных тиристоров: VS1, VS2, VS3, VS4, VS5, VS6. Управляющие электроды тиристоров подсоединены к выходам СИФУ, которая распределяет управляющие импульсы на все тиристоры и осуществляет их сдвиг в зависимости от сигнала управления Uу. К валу АД подсоединен тахогенератор BR, ЭДС етг которого пропорциональна скорости
поступает на вход СИФУ. Рассмотрим работу схемы на рис. 4.15, а при увеличении нагрузки на валу АД. Пусть при скорости АД w1 таким образом подобраны задающий сигнал Uз,с и сигнал обратной связи етг, что угол управления a равен 75° (см. рис 4.14, в) Тогда при моменте сопротивления Mс1 АД будет работать в точке 1. При увеличении нагрузки на валу АД до значения Мс2 скорость АД начнет снижаться, соответственно начнет уменьшаться и ЭДС тахогенератора етг~w. Уменьшение етг вызывает согласно (4.25) увеличение напряжения управления Uy, что определит уменьшение с помощью СИФУ угла управления до значения a=60°. Двигатель при этом станет работать в точке 2 на характеристике, соответствующей a=60°. При этом угловая скорость w2 будет меньше, чем w1, однако путем соответствующего выбора тахогенератора и параметров СИФУ можно получить достаточно жесткие механические характеристики, например характеристику вида 1–2, показанную на рис. 4.14, в.
Изменяя с помощью потенциометра ЗП значение задающего напряжения Uз,с, можно получить ряд механических характеристик электропривода, показанных на рис. 4.15, б. Из рис. 4.15, б следует, что эти характеристики имеют относительно высокую жесткость и перегрузочную способность и позволяют обеспечить большой диапазон регулирования скорости АД. Кроме регулирования скорости АД включение тиристоров в цепь статора позволяет осуществить изменение направления скорости, т. е. реверс АД. На рис. 4.16, а приведена реверсивная схема управления АД, осуществляемая с помощью пяти пар встречно-параллельно соединенных тиристоров. Если сигналы управления подать на тиристорные пары 1, 2 и 3, то на выводах АД будет питающее напряжение с последовательностью фаз сети АВС и АД будет вращаться, например, по часовой стрелке. Если же сигналы управления подать на тиристорные пары 4, 5 и 3, а с тиристорных пар 1 и 2 снять сигналы управления, то на выводах АД будет другая последовательность фаз сети – ВАС; при этом направление угловой скорости магнитного поля и соответственно ротора АД изменится на обратное. Используя тиристоры реверсивного ТПН, можно обеспечить подачу в цепь статора постоянного тока и осуществить тем самым режим динамического торможения АД. На рис. 4.16, б показаны тиристоры, на которые при осуществлении динамического торможения подаются импульсы управления. На остальные тиристоры управляющие импульсы не подаются. Поэтому такие тиристоры не влияют на работу схемы, и их можно исключить из рассмотрения. На рис. 4.16, б представлена схема, составленная из схемы рис. 4.16, а таким образом, что закрытые тиристоры не изображены. Из схемы рис. 4.16, б ясно видно, что включенные тиристоры образуют однофазный управляемый мост, с помощью которого по двум обмоткам статора АД проходит постоянный ток Iп, что и определяет режим динамического торможения. Из изложенного следует, что с помощью ТПН можно осуществить пуск, реверсирование, торможение и регулирование скорости, тока и момента АД. Это говорит о больших возможностях использования асинхронного электропривода с ТПН и определяет широкую область его приме нения. Основными достоинствами рассматриваемой системы электропривода являются ее относительная простота, надежность, легкость автоматизации в общей технологической схеме производства, удобство управления. Вместе с тем эта система электропривода имеет существенный недостаток, заключающийся в больших потерях в обмотке ротора при работе на низких скоростях. Действительно, согласно (4.15) электрические потери в роторе при низких скоростях и, следовательно, больших скольжениях могут быть весьма высокими, что уменьшает КПД электропривода. Отмеченный недостаток не является очень серьезным в том случае, когда время работы АД на пониженной скорости мало по сравнению со временем цикла его работы. Для примера назовем механизм передвижения (тележку) электрических кранов, где пониженная скорость АД используется для точной остановки тележки с грузом. В этих случаях рассматриваемая система электропривода оказывается целесообразной. Остановимся кратко на основных показателях регулирования данной системы электропривода. Диапазон регулирования скорости при использовании обратных связей, например по скорости, относительно высок и достигает десяти. При использовании обратных связей могут быть получены жесткие характеристики. Экономичность регулирования зависит от конкретных условий работы электропривода. В частности, если время работы на пониженной скорости невелико по сравнению с временем цикла, то экономичность может быть высокой. Регулирование скорости АД в этой системе плавное и производится только вниз от естественной (основной) характеристики. в) Расчет механических характеристик АД при его питании от ТПН Механические характеристики АД при питании его от ТПН могут быть рассчитаны и построены на основании следующего соотношения:
где Мгр – момент на граничной характеристике при данном скольжении s, соответствующий углу управления тиристоров a=0;U1–1-я гармоническая составляющая напряжения на выводах АД. Если не учитывать активное сопротивление ТПН, что в дальнейшем и принимается, то граничная характеристика при Rд2=0 совпадает с естественной, а при Rд2¹0 – с реостатной характеристиками АД. Напряжение U1 зависит от угла управления тиристорами a и так называемого угла нагрузки
где xд,вэ, Rдв – эквивалентные активное и индуктивное сопротивления фазы двигателя по отношению к выводам статорной обмотки; R1 – суммарное сопротивление фазы статора,
Из (4.27) следует, что угол нагрузки Q зависит от скольжения s. Графически типовая зависимость Q(s), рассчитанная по (4.27), показана на рис. 4.17, а. На рис. 4.17, б показаны зависимости U1 от a и Q, которые аналитически не выражаются. Порядок расчета механических характеристик АД при его питании от ТПН состоит в следующем. Задаются рядом значений скольжения s. Для этих значений по граничной характеристике определяется момент Мгр, а по (4.27) – угол нагрузки Q. Далее для заданного угла управления a и известным значениям Q по кривым рис. 4.17, б определяется величина U1/U1ном и затем с помощью (4.26) находятся значения момента двигателя М.
Поиск по сайту: |
 .
.

 (4.22)
(4.22) (4.23)
(4.23)
 допустимая мощность АД остается практически неизменной. Поэтому при увеличении вдвое числа пар полюсов АД и уменьшении тем самым вдвое синхронной скорости допустимый момент на валу АД увеличивается примерно в 2 раза. Механические характеристики АД для данного способа переключения обмоток показаны на рис 4.10, в. Они соответствуют регулированию скорости при постоянной мощности.
допустимая мощность АД остается практически неизменной. Поэтому при увеличении вдвое числа пар полюсов АД и уменьшении тем самым вдвое синхронной скорости допустимый момент на валу АД увеличивается примерно в 2 раза. Механические характеристики АД для данного способа переключения обмоток показаны на рис 4.10, в. Они соответствуют регулированию скорости при постоянной мощности.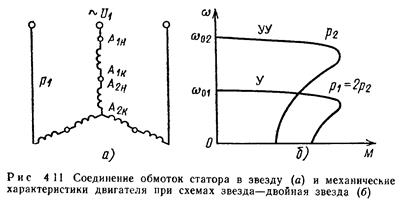
 (4.24)
(4.24)


 , где g – коэффициент пропорциональности. Электродвижущая сила тахогенератора сравнивается с задающим напряжением Uз,с, снимаемым с задающего потенциометра ЗП, причем эти напряжения включены навстречу друг другу. Разность напряжений Uз,с и етг, равная напряжению управления
, где g – коэффициент пропорциональности. Электродвижущая сила тахогенератора сравнивается с задающим напряжением Uз,с, снимаемым с задающего потенциометра ЗП, причем эти напряжения включены навстречу друг другу. Разность напряжений Uз,с и етг, равная напряжению управления (4.25)
(4.25)
 (4.26)
(4.26) , который характеризует АД как активно-индуктивную нагрузку ТПН и определяется схемой замещения АД,
, который характеризует АД как активно-индуктивную нагрузку ТПН и определяется схемой замещения АД, (4.27)
(4.27) – приведенное суммарное сопротивление фазы ротора, xm – индуктивное сопротивление цепи намагничивания.
– приведенное суммарное сопротивление фазы ротора, xm – индуктивное сопротивление цепи намагничивания.