|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
РЕГУЛИРОВАНИЕ СКОРОСТИ, ТОКА И МОМЕНТА С ПОМОЩЬЮ РЕЗИСТОРОВ В ЦЕПЯХ РОТОРА И СТАТОРА
Один из распространенных способов регулирования скорости, тока и момента АД с фазным ротором связан с введением и изменением дополнительных резисторов в цепи его ротора. Схема, в которой реализуется этот способ регулирования, приведена на рис. 4.7, а. Основным достоинством этого способа является простота реализации, что определило его широкое применение в ряде электроприводов.
а) Характеристики и показатели Для построения семейства получаемых при этом способе искусственных механических характеристик проведем анализ их характерных точек. С помощью (4 7) и (48) и выражения для скорости идеального холостого хода 1) скорость идеального холостого хода АД w0 при регулировании R2д не изменяется; 2) максимальный (критический) момент двигателя Мк также остается неизменным; 3) критическое скольжение sк увеличивается при увеличении Rд2. Выполненный анализ позволяет представить искусственные реостатные характеристики в виде семейства кривых, показанного на рис. 4.7, б. Использование этих характеристик для регулирования скорости АД характеризуется такими же показателями, что и для ДПТ независимого возбуждения. Диапазон регулирования скорости небольшой – около 2–3, что определяется снижением жесткости характеристик и ростом потерь по мере увеличения диапазона регулирования скорости. Плавность регулирования при реостатном регулировании небольшая и определяется плавностью изменений; дополнительного резистора Rд2. Скорость АД изменяется только вниз от основной. Экономичность способа определяется стоимостью используемых средств регулирования и расходами при эксплуатации электропривода. Затраты, связанные с созданием данной системы электропривода, невелики, так как для регулирования обычно используются простые и дешевые ящики металлических резисторов. В то же время при эксплуатации этой системы затраты велики, поскольку значительны потери энергии. Электрические потери в роторной цепи DР2, называемые потерями скольжения, определяются выражением
которое аналогично (3.9). Чем больше скольжение s, тем больше потери в роторной цепи, поэтому реализация большого диапазона регулирования скорости приводит к значительным потерям энергии и снижению КПД электропривода. Регулирование скорости этим способом применяется в тех случаях, когда требуется небольшой диапазон регулирования скорости и работа на пониженных скоростях непродолжительна. Например, этот способ нашел широкое применение в электроприводе ряда подъемно-транспортных машин и механизмов. Рассматриваемый способ также используется для регулирования тока и момента АД при его пуске. Если обратиться к характеристикам рис. 4 7, б, то можно отметить, что за счет подбора сопротивления резистора пусковой момент АД может быть увеличен вплоть до значения критического момента Мк. Это свойство АД используется при его пуске с моментом нагрузки, превышающим пусковой момент АД Мп на естественной характеристике. Пусковой ток АД в соответствии с (4.1) уменьшается по мере увеличения R2д, что позволяет с помощью введения добавочных резисторов осуществлять его ограничение. б) Расчет резисторов в цепи ротора Задача по расчету дополнительных резисторов в цепи ротора обычно формулируется следующим образом. Задана искусственная механическая характеристика АД (полностью или частично) или отдельная точка этой характеристики с координатами wи, Ми. Найти сопротивление дополнительного резистора R2д, при включении которого в цепь ротора АД будет иметь заданную искусственную характеристику или же она будет проходить через заданную точку. При этом предполагается, что естественная механическая характеристика АД известна (рассчитана или снята экспериментально). Отметим, что требуемая искусственная характеристика может быть задана по условиям пуска или регулирования скорости. Расчет сопротивления добавочного резистора R2д может быть выполнен несколькими способами в зависимости от формы задания требуемой искусственной механической характеристики. 1. Искусственная характеристика задана полностью и известен участок критического момента, как, например, характеристика 2 на рис. 4.7, б. В этом случае расчет целесообразно вести по формуле (4.8), с помощью которой находится отношение критических скольжений АД на естественной и искусственной характеристиках,
где Rp – сопротивление фазы ротора АД. Из (4.16) определяем искомое значение R1д
2. Если искусственная характеристика задана своей рабочей частью и участок критического момента не определен, то удобно использовать метод отрезков, который уже рассматривался в гл. 3 применительно к ДПТ независимого возбуждения. На рис. 4.7, б выполнено построение для АД при использовании этого метода, для чего проведена вертикальная линия, соответствующая номинальному моменту Мном, и отмечены характерные точки а, b, c, d, e. Сопротивление искомого резистора R2д1 определяется с помощью следующей формулы:
где С помощью метода отрезков из рис. 4.7, б при необходимости может быть найдено и сопротивление фазы обмотки АД Rр
Еще одно удобное соотношение для расчета сопротивления добавочного резистора в цепи ротора может быть получено, на основании выражения (4.5). Из него следует, что при любом фиксированном токе и моменте АД отношение полного сопротивления цепи ротора к скольжению есть величина постоянная, т.e.
где se – скольжение АД на естественной характеристике, соответствующее моменту Ми. Отметим, что при отсутствии данных о значении сопротивления резистора Rp оно может быть найдено по следующей приближенной формуле:
где sном – номинальное скольжение АД. Пример 4.2. Для АД с контактными кольцами рассчитать сопротивление добавочного резистора R2д, при включении которого в цепь ротора момент АД при пуске равен критическому (максимальному). Двигатель имеет следующие технические данные: Рном=4 кВт, nном=960 об/мин, U1ном=380 В; I2ном=27,3 A; Е2к =100 В; f1=50 Гц, р=3, lм=2. 1 Определяем скорость идеального холостого хода
2 Вычисляем номинальные скорость и скольжение АД
3 Находим критическое скольжение АД
4 Рассчитываем сопротивление фазы ротора АД по формуле (4.21)
5 Определяем искомое сопротивление дополнительного резистора в цепи ротора, учитывая, что sк,и=1,
Пример 4.3. Для рассмотренного в примере 4.2 АД рассчитать добавочное сопротивление в цепи ротора, при котором АД имеет при номинальном моменте скорость, равную половине номинальной, т.е. wи=0,5 wном=0,5×100,5=50,25 рад/с. 1 Определяем скольжение, соответствующее скорости wи,
2 Рассчитываем с помощью формулы (4.20) искомое сопротивление дополнительного резистора
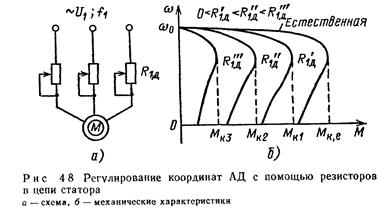
в) Регулирование координат с помощью резисторов в цепи статора Схема, позволяющая регулировать координаты АД за счет добавочных резисторов в цепи статора, приведена на рис. 4.8, а. Чаще всего этот способ применяется для АД с короткозамкнутым ротором, у которых нельзя использовать цепь ротора для включения каких-либо регулирующих устройств. Схема рис. 4.8, а соответствует симметричному включению добавочных резисторов во все три фазы статора. Помимо такой схемы используется включение резистора в одну фазу, что позволяет получить примерно такие же характеристики двигателя при уменьшении количества регулирующих элементов.
Получаемые при этом искусственные характеристики приведены на рис. 4.8, б. Они построены исходя из анализа характерных точек механической характеристики, а именно 1. Скорость идеального холостого хода w0 не зависит от сопротивления фазы статора R1, поэтому все искусственные характеристики проходят через одну и ту же точку на оси ординат. 2. Критические момент и скольжение АД в соответствии с (4.7) и (4.8) уменьшаются по мере увеличения R1д. 3. Пусковой момент АД Мп, который определяется выражением (4.6) при s=1, также уменьшается при увеличении R1д. Искусственные характеристики рис. 4.8, б мало пригодны для регулирования скорости АД: они обеспечивают небольшой диапазон изменения скорости; жесткость характеристик АД и его перегрузочная способность, характеризуемая критическим моментом, по мере увеличения R1д снижаются; способ отличает и низкая экономичность. В силу этих недостатков регулирование скорости АД с помощью активных резисторов в цепи его статора применяется редко. Этот способ обычно используется для ограничения токов и моментов АД с короткозамкнутым ротором в различных переходных процессах – при пуске, реверсе и торможении. Например, такая схема применяется в электроприводе лифтов, имеющем двухскоростной АД. В таких электроприводах при переходе с высокой скорости на пониженную в цепь низкоскоростной обмотки статора вводится добавочный резистор, который обеспечивает ограничение тока и момента АД. Расчет добавочных резисторов в цепи статора для заданных токов и моментов приведен в [5].
Поиск по сайту: |

 отмечаем следующее:
отмечаем следующее: (4.15)
(4.15) (4.16)
(4.16) (4.17)
(4.17) (4.18)
(4.18) – номинальное сопротивление АД; Е2к – ЭДС ротора при s=l; I2ном – номинальный ток ротора.
– номинальное сопротивление АД; Е2к – ЭДС ротора при s=l; I2ном – номинальный ток ротора. (419)
(419) . Таким образом, если задана некоторая точка f искусственной характеристики 3 (см рис 4.7, б) с координатами Mи, sи, то искомое сопротивление резистора R2д2 может быть найдено по следующей формуле, аналогичной (4.17):
. Таким образом, если задана некоторая точка f искусственной характеристики 3 (см рис 4.7, б) с координатами Mи, sи, то искомое сопротивление резистора R2д2 может быть найдено по следующей формуле, аналогичной (4.17): (4.20)
(4.20) (4.21)
(4.21)