|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
СХЕМА УПРАВЛЕНИЯ ДПТ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ⇐ ПредыдущаяСтр 19 из 19
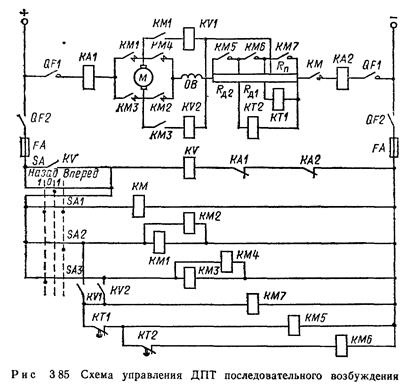
Релейно-контакторные схемы управления ДПТ последовательного возбуждения при пуске, реверсе и торможении выполняются по тем же принципам времени, скорости (ЭДС), тока и пути, что и для других видов ДПТ. Многие типовые узлы, которые были рассмотрены ранее, могут быть использованы в электроприводе с ДПТ последовательного возбуждения, Рассмотрим схему управления ДПТ последовательного возбуждения, показанную на рис. 3.85 Эта схема обеспечивает пуск ДПТ в две ступени по принципу времени и реверс или торможение противовключением по принципу ЭДС. Схема включает в себя пять однополюсных контакторов КМ, КМ1, КМ2, КМЗ, КМ4; два контактора ускорения КМ5 и КМ6, контактор противовключения КМ7; реле противовключения KVI и KV2; реле времени КТ1 и КТ2; выключатели QF1 и QF2. Органом управления в схеме является командоконтроллер SA, имеющий три положения: нулевое, «Вперед» и «Назад». Защиту электропривода обеспечивают максимальные реле КА1, КА2, реле напряжения KVи предохранители FA. Реле противовключения KVI и KV2 настраиваются таким же образом, что и в схеме рис 3 45, а. Пуск ДПТ, например, в условном направлении «Вперед» осуществляется переводом командоконтроллера SA в положение «Вперед» Если защита находится в исходном положении, то это приведет к срабатыванию аппаратов КМ, КМ1, КМ2 и подключению ДПТ к сети Возникшее за счет пускового тока падение напряжения на резисторах Rпи Rд1 вызовет включение реле КТ1 и КТ2, которые разомкнут свои контакты в цепи аппаратов КМ5 и КМ6. Одновременно с этим сработает реле KVI и своим контактом подаст питание на контактор КМ7. Последний, сработав, закоротит ступень противовключения Rп и одновременно катушку реле КТ1, которое, потеряв питание, начнет отсчет выдержки времени. Далее в порядке, рассмотренном выше для аналогичных схем, в функции времени произойдет последовательное закорачивание ступеней пускового резистора Rд1 и Rд2. Для реверса командоконтроллер SA переставляется в положение «Назад». При его переходе в это положение отключаются аппараты КМ1, КМ2, КМ7, КМ5, КМ6, вводя в цепь якоря резисторы Rп, Rд1, Rд2 и подготавливая тем самым ДПТ к реверсу или торможению
При последующем включении аппаратов КМ, КМ2, КМ4 изменяется полярность напряжения на якоре ДПТ, и он переходит в режим торможения противовключением. В соответствии со своей настройкой реле KV2, несмотря на замыкание контакта КМ3 в своей цепи питания, не срабатывает, вследствие чего контакторы КМ7, КМ5 и КМ6 лишены питания и торможение происходит при полностью введенных в цепь якоря резисторах Rп+Rд1+Rд2. По мере снижения скорости растет напряжение на катушке реле КV2 (см рис 346, б), и при скорости, близкой к нулю, произойдет его срабатывание. Если при этом контроллер остается в положении «Назад», то начинается процесс разбега ДПТ в этом направлении с рассмотренным выше порядком работы схемы. Если при достижении нулевой скорости переместить контроллер в среднее положение, то ДПТ будет отключен от сети и схема вернется в исходное положение. В общем случае точный анализ переходных процессов в электроприводе с ДПТ последовательного возбуждения и получение зависимостей изменения координат во времени являются сложными задачами. Это определяется тем, что дифференциальные уравнения для якорной цепи двигателя и механической части привода являются нелинейными из-за наличия в них произведения двух переменных – тока и магнитного потока для момента и скорости и потока для ЭДС. Дополнительное усложнение исследования связано с нелинейной зависимостью магнитного потока от тока, выражаемой кривой намагничивания, а также нелинейностью характеристик ДПТ. В связи с этим точное исследование Переходных процессов в электроприводе возможно только с помощью вычислительных машин. В практических инженерных расчетах, как правило, пользуются различными приближенными способами получения кривых переходного процесса
Поиск по сайту: |