|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
ПРИМЕРЫ ЗАМКНУТЫХ СИСТЕМ ПРЕОБРАЗОВАТЕЛЬ – ДВИГАТЕЛЬ
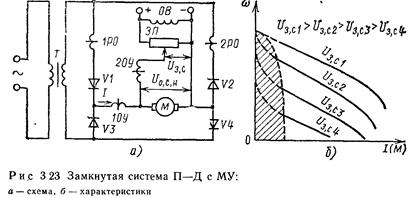
Реальные системы П–Д отличаются друг от друга типом преобразователя и видами применяемых обратных связей. Обычно в замкнутых системах применяется не одна, а две или несколько обратных связей, с помощью которых реализуется весь комплекс требований к автоматизированному электроприводу со стороны приводимой им в движение рабочей машины. Здесь рассматриваются примеры замкнутых систем с использованием преобразователя на базе магнитного усилителя и тиристорного преобразователя. а) Замкнутая система П–Д с силовым магнитным усилителем в качестве преобразователя Упрощенная принципиальная схема электропривода с магнитным усилителем (МУ) в качестве преобразователя (система МУ–Д) приведена на рис 3 23, а Однофазный МУ имеет четыре обмотки: две рабочие (силовые) 1РО и 2РО и две управления 1ОУ и 20У. В цепи рабочих обмоток
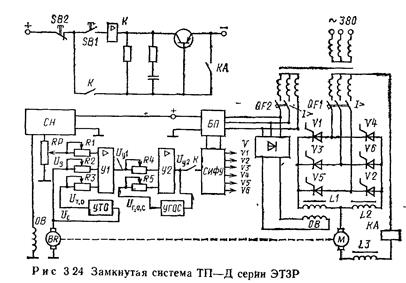
включены четыре вентиля V1–V4, с помощью которых осуществляется выпрямление переменного тока и одновременно реализуется внутренняя положительная связь МУ по току нагрузки Трансформатор Т служит для согласования напряжений сети переменного тока и якорной цепи ДПТ. Обмотка управления 1ОУ является обмоткой положительной обратной связи по току. Она намотана проводом большого сечения и включена непосредственно в цепь якоря. Обмотка управления 20У обеспечивает суммирование двух сигналов: задающего сигнала скорости Uз,с и сигнала отрицательной обратной связи по напряжению Uо,с,н который снимается непосредственно с якоря ДПТ Характеристики ДПТ для этой схемы приведены на рис 3 23, б Ограничение тока и момента в этой системе происходит естественным путем, за счет большого сопротивления якорной цепи. Отметим, что данная система характеризуется наличием значительной области прерывистого тока (заштрихованная область на рис 3.23, б). б) Электроприводы с тиристорным преобразователем Электропривод с тиристорным преобразователем в настоящее время является основным типом автоматизированного электропривода постоянного тока. Электротехническая промышленность выпускает большую номенклатуру тиристорных преобразователей на широкие диапазоны мощностей, токов и напряжений, а также комплектные тиристорные электроприводы постоянного тока, в состав которых входят ДПТ, тиристорный преобразователь, средства автоматизации и коммутационная аппаратура. Типы выпускаемых преобразователей и комплектных электроприводов приведены в [41]. В качестве примера рассмотрим тиристорный комплектный реверсивный электропривод постоянного тока серии ЭТЗР. Электроприводы этого типа выполнены в виде замкнутой системы автоматического регулирования скорости ДПТ с отрицательной обратной связью по скорости, которая в зависимости от настройки обеспечивает относительный перепад скорости в пределах 0,5–10 % при изменении момента нагрузки от 0,1 Мном до Мном. В системе обеспечивается также регулирование тока с помощью УТО, построенного по так называемому принципу упреждающего токоограничения. Для обеспечения устойчивости и требуемого качества переходных процессов электропривода в схеме применены две гибкие обратные связи: по скорости ДПТ и результирующему сигналу управления Uу2. Упрощенная схема электропривода ЭТЗР приведена на рис. 3.24. Якорь ДПТ серии ПБСТ, имеющего встроенный тахогенератор BR, получает питание от тиристорного преобразователя, содержащего силовую часть (тиристоры V1–V6) и СИФУ. Тиристоры V1–V6 силовой части соединены в две трехфазные нулевые схемы, образующие реверсивный преобразователь с двумя комплектами выпрямителей, составляющих выпрямительную и инверторную группы. Управление этими группами осуществляется с использованием согласованного совместного принципа, при котором выполняется следующее равенство:
где a1, a2 – соответственно углы управления тиристорами выпрямительной и инверторной групп; Dj – запас угла, компенсирующий разброс углов управления тиристорами. Для уменьшения переменной составляющей уравнительного тока, протекающей между выпрямительной и инверторной группами, в электроприводе используются ограничительные реакторы L1 и L2. Включение в цепь якоря сглаживающего реактора L3 позволяет исключить режим прерывистого тока и повысить использование ДПТ по току. Управление тиристорами V1–V6 обеспечивается транзисторной СИФУ, работающей по вертикальному принципу. Она имеет три канала, каждый из которых работает на два тиристора, включенных в одну фазу V1– V4, V3–V6, V5–V2.
Питание электропривода осуществляется от трехфазного трансформатора Т с двумя вторичными обмотками. Одна из них, имеющая нулевой вывод, обеспечивает питание силовой части привода, а вторая – питание обмотки возбуждения ДПТ ОВ и схемы управления. Выпрямитель V осуществляет подачу выпрямленного тока в ОВ, а блок питания БП и стабилизатор напряжения СН обеспечивают необходимым напряжением постоянного и переменного тока элементы схемы управления и обмотку возбуждения тахогенератора ОВ. В состав схемы управления электропривода входят промежуточный усилитель У1, усилитель мощности (эмиттерный повторитель) У2, узел токоограничения УТО, узел гибкой обратной связи УГОС, задающий потенциометр RP, кнопки управления SB1 и SB2 и пусковое реле К. Промежуточный сигнал управления Uу, формируется как алгебраическая сумма сигналов задающего Uз, тахогенератора Uc и токоограничения Uт, о, для выработки которого используется нелинейная положительная обратная связь по скорости ДПТ. При токе якоря меньшем тока отсечки (см. рис. 3.22, б) работает только контур регулирования скорости. При токе якоря, превышающем ток отсечки, за счет нелинейности цепи токоограничения отрицательная обратная связь по скорости ДПТ отключается и начинает действовать положительная связь, обеспечивая ограничение тока и момента на заданном уровне. Сигнал управления Uу1 вместе с сигналом корректирующей гибкой обратной связи Uг,о,с поступает на вход усилителя мощности У2 и после усиления в виде результирующего сигнала Uу2 подается на вход СИФУ через замыкающий контакт пускового реле К. Управление этим реле осуществляется с помощью кнопок управления: SB1 при пуске ДПТ и SB2 при его останове. Реверсирование ДПТ осуществляется путем изменения полярности задающего сигнала Uз. В электроприводе ЭТЗР осуществляется ряд защит, блокировок и сигнализаций. Токовое реле КА, катушка которого включена в цепь якоря ДПТ, а контакт – в цепь питания реле К, обеспечивает максимальную токовую защиту ДПТ. При его срабатывании отключается реле К, с тиристоров снимаются сигналы управления и ДПТ отключается от источника питания. Автоматические выключатели QF1 и QF2 осуществляют максимальную токовую защиту соответственно силовой части тиристорного преобразователя, обмотки возбуждения ДПТ и схемы управления [41].
Поиск по сайту: |