|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
B.I. ЭЛЕКТРОПРИВОД КАК СРЕДСТВО ЭЛЕКТРИФИКАЦИИ И АВТОМАТИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВСтр 1 из 5Следующая ⇒
ВВЕДЕНИЕ Создание материально-технической базы коммунистического общества, решение глобальных экономических и социальных задач нашего общества невозможны без полной электрификации всех отраслей народного хозяйства. Осуществляемые на ее основе автоматизация и комплексная механизация производственных и технологических процессов позволяют резко повысить производительность труда и улучшить условия труда и жизни рабочих и колхозников. Как следствие этого растет материальное благосостояние советских людей, обогащается их духовный мир, постепенно исчезают грани между городом и деревней, физическим и умственным трудом. Важную роль в реализации планов электрификации нашей страны играет электрический привод, который в настоящее время является основным видом привода самых разнообразных производственных и. транспортных механизмов, бытовых приборов, устройств водо- и газоснабжения, средств телевизионной и космической техники, медицинской аппаратуры и т.д. Более 60% вырабатываемой в стране электроэнергии потребляется электрическим приводом. В ведущих отраслях промышленности – металлургической, машиностроительной, химической, добывающей и ряде других коэффициент электрификации, представляющий собой отношение установленной мощности электродвигателей к общей установленной мощности двигателей всех видов, приближается в настоящее время к 100 %. Чем же определяется главенствующее место электрического привода среди других возможных видов привода – теплового, гидравлического и пневматического? Известными преимуществами электрической энергии являются простота ее выработки и распределения, легкость преобразования ее в другие виды энергии. Вместе с тем электрический привод обладает и рядом собственных достоинств и отличительных черт: 1) возможностью изготовления электродвигателей на самые разнообразные мощности и скорости движения. Диапазон мощностей современного электропривода колеблется от сотых долей ватта до десятков тысяч киловатт, а пределы частоты вращения ‑ от долей оборота вала в минуту до нескольких сотен тысяч оборотов в минуту; 2) возможностью создания электроприводов для работы в самых разнообразных условиях: в среде агрессивных жидкостей и газов, в условиях космического пространства, при низких и высоких температурах и т. д. Разнообразие конструктивных исполнений электродвигателей позволяет осуществлять рациональное сочленение электропривода с рабочей машиной; 3) возможностью с помощью простых средств реализовать разнообразные и сложные виды движения исполнительных органов рабочих машин, а также изменять направление движения и его параметры ‑ скорость, ускорение; 4) легкостью автоматизации производственных и технологических процессов, простотой включения электропривода в общую автоматизированную систему управления производством; 5) высоким КПД электропривода, надежностью в эксплуатации, благоприятными условиями для обслуживающего персонала, отсутствием загрязнения окружающей среды. Отметим и то важное обстоятельство, что разработка и серийный выпуск отечественной промышленностью различных средств вычислительной техники, микроэлектроники, полупроводниковых преобразователей, электрических машин, аппаратов и других элементов автоматизированного электропривода способствуют его бурному развитию, совершенствованию и превращению в основное средство автоматизации и комплексной механизации всех отраслей народного хозяйства.
В.2. ПОНЯТИЕ «ЭЛЕКТРОПРИВОД» Электрическим приводом называется электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением [38]. Для выполнения этих функций электропривод вырабатывает механическую энергию за счет электрической энергии, получаемой им от источника электрической энергии (сети электроснабжении). Вырабатываемая электроприводом механическая энергия передается различным
Рис. В. 1. Структурная схема электропривода исполнительным органам рабочих машин и механизмов (ленте транспортера или конвейера, шпинделю токарного станка, крыльчатке насоса, валкам прокатного стана, кабине лифта, антенне радиотелескопа и др.) и при необходимости регулируется в соответствии с технологическими требованиями к режимам работы исполнительного органа. За счет полученной энергии исполнительный орган совершает требуемое механическое движение, обеспечивая тем самым выполнение производственных и технологических операций: перемещение грузов, обработку деталей, транспортировку жидкости или газа, слежение за небесными телами и т.д. Структурная схема автоматизированного электропривода показана на рис. В.1. Основой любого электропривода является электродвигательное устройство (электродвигатель) ЭД, который обеспечивает преобразование электрической энергии ЭЭ в механическую МЭ. Для согласования движений ЭД и исполнительного органа ИО рабочей машины служит механическое передаточное устройство МПУ, которое обеспечивает изменение параметров вырабатываемой ЭД механической энергии. Движущаяся часть ЭД (ротор), МПУ и НО образуют механическую часть электропривода. В ряде случаев МПУ отсутствует и ЭД непосредственно сочленяется с ИО. Механическую энергию ЭД вырабатывает за счет электрической энергии, которая подводится к ЭД от источника электрической энергии ИЭЭ через электрическое преобразовательное устройство ПУ. Назначение ПУ состоит в преобразовании и регулировании параметров электрической энергии, поступающей от ИЭЭ к ЭД для управления механическим движением НО. Управление процессом преобразования энергии осуществляется с помощью управляющего устройства УУ, которое вырабатывает управляющий сигнал Uy в функции задающего сигнала Ua (иногда его называют также входным или сигналом уставки) и различных дополнительных электрических сигналов, содержащих информацию о процессе преобразования энергии, реальных параметрах механического движения ЭД или ИО и т.д. Использование этих сигналов (на рис. В.1 они показаны штриховыми линиями) позволяет получить требуемые характеристики движения ЭД и ИО, достигнуть оптимального режима работы производственных механизмов, обеспечить защиту и блокировки при работе электропривода. Эти сигналы вырабатываются соответствующими датчиками, которые на рис. В.1 не показаны. Преобразовательное и управляющее устройство образуют систему управления СУ, которая вместе с обмотками составляет электрическую часть электропривода. Ниже приведены наиболее распространенные примеры исполнительных органов и элементов электропривода:
1. Исполнительный орган Шпиндель токарного станка; подвижной стол строгального станка; лента (цепь) конвейера; ковш экскаватора; кабина подъемника; крыльчатка насоса; валки прокатного стана; ходовой винт механизма подачи станка; тележка механизма передвижения крана; крюк подъемной лебедки
2. Электродвигатель Двигатель постоянного тока с разными видами возбуждения; асинхронный двигатель с фазным или короткозамкнутым ротором; синхронный двигатель; линейные двигатели постоянного или переменного тока; вентильный двигатель; шаговый двигатель; двигатели с катящимися и волновыми роторами; редукторные двигатели
3. Механическое передаточное устройство Цилиндрические и червячные редукторы; планетарная передача; передача винт ‑ гайка; волновая передача; кривошипно-шатунная передача; цепная и ременная передачи; реечная передача 4. Преобразовательное устройство Управляемый выпрямитель; преобразователи частоты, напряжения переменного тока; импульсные преобразователи напряжения; инверторы
5. Управляющее устройство Кнопка, ключ управления; регулятор; управляющая вычислительная машина; реле; логические элементы; усилитель; фазовый детектор
6. Источник электрической энергии Однофазная или трехфазная сеть переменного тока промышленной частоты; цеховая сеть постоянного тока; аккумуляторная батарея; дизель-генераторная установка; солнечная батарея
В.3. ФУНКЦИИ ЭЛЕКТРОПРИВОДА И ТРЕБОВАНИЯ К НЕМУ Настоящий период жизни общества характеризуется высоким уровнем развития средств производства, транспорта, связи, бытовой техники. Для обеспечения растущих потребностей человечества созданы, продолжают разрабатываться и совершенствоваться сотни тысяч рабочих машин, производственных и бытовых механизмов, подъемно-транспортных средств и т.д. Они осуществляют обработку материалов и изготовление разнообразных изделий, транспортировку людей и веществ, добычу полезных ископаемых, обеспечивают быт людей и выполняют многие другие функции. Представление об основных технологических процессах и рабочих машинах дает табл. В.1 (колонки 2 и 3). Рассмотрим эти примеры с целью определения требований к электроприводу и выполняемых им функций. Для функционирования рабочих машин и механизмов к их исполнительным органам от привода должна быть подведена механическая энергия, за счет которой и совершается их движение- Характер этого движения может быть разнообразным ‑ вращательным однонаправленным (крыльчатка насоса и вентилятора, фреза фрезерного станка) и реверсивным (валки прокатного стана, шпиндель токарного станка), поступательным однонаправленным (лента транспортера, цепь конвейера) и реверсивным (стол строгального станка, подъемные механизмы), а также возвратно-поступательным (вибрационные механизмы, прессы). Иногда эти движения должны совершаться сразу в нескольких плоскостях ‑ антенна радиотелескопа, «руки» робота и манипулятора, ковш экскаватора. Многие машины и механизмы при своей работе требуют изменения не только направления, но и скорости движения исполнительных органов. Так, угловая скорость валков прокатного стана должна быть различной в зависимости от профиля прокатываемого металла. Также необходимо изменять скорость подачи режущего инструмента или стола металлообрабатывающего станка в зависимости от твердости материала обрабатываемой детали, ее конфигурации и стойкости режущего инструмента. Для большинства подъемно-транспортных машин-кранов, лифтов, подъемников ‑ для обеспечения точного останова исполнительных органов их скорость должна быть предварительно снижена. Еще одно важное требование к электроприводу связано с поддержанием с заданной точностью скорости движения исполнительного органа (металлорежущие станки, испытательные стенды, прокатные станы и т.д.). Все перечисленные требования к характеру движения исполнительных органов, которые должны быть обеспечены приводом, отражены в табл. В.1. Наряду с обеспечением движения исполнительных органов электропривод одновременно выполняет и разнообразные функции по автоматизации технологических процессов и операций. Наиболее распространенные задачи, которые чаще всего возникают и решаются, также указаны в табл. В.1. Круг этих задач очень разнообразен. Большинство может быть решено только с применением автоматизированного электропривода, в котором используются самые последние достижения электроники, автоматики, электромеханики и электромашиностроения. Немаловажной функцией, возлагаемой на электропривод, является обеспечение защит, блокировок и сигнализаций при работе технологического оборудования. Для этого в структуру электропривода вводятся соответствующие элементы и устройства, предотвращающие неправильную последовательность операций или ошибочные действия оператора и осуществляющие ограничение хода исполнительных органов, останов машины или механизма при возникновении аварийных ситуаций и т. д.
Таблица В.1
В.4. КЛАССИФИКАЦИЯ ЭЛЕКТРОПРИВОДОВ
Данные табл. В.1 позволяют сделать вывод о большом разнообразии существующих электроприводов. Их классификация обычно производится по виду движения и степени управляемости электропривода, роду электрического и механического передаточных устройств, способу передачи механической энергии исполнительным органам и ряду других признаков. По виду движения различаются электроприводы вращательного и поступательного однонаправленного и реверсивного движения, а также электроприводы возвратно-поступательного движения. Эти движения могут иметь как непрерывный, так и дискретный характер. По принципам регулирования скорости и положения электропривод может быть: нерегулируемый (исполнительный орган приводится в движение с одной постоянной скоростью); регулируемый (путем воздействия на электропривод скорость движения исполнительного органа изменяется в соответствии с требованиями технологического процесса); следящий (с помощью электропривода воспроизводится перемещение исполнительного органа в соответствии с произвольно изменяющимся задающим сигналом); программно-управляемый (электропривод обеспечивает перемещение исполнительного органа в соответствии с заданной программой); адаптивный (электропривод автоматически обеспечивает оптимальный режим движения исполнительного органа при изменении условий его работы); позиционный (электропривод обеспечивает регулирование положения исполнительного органа рабочей машины). По роду механического передаточного устройства различают редукторный электропривод, содержащий один из видов механического передаточного устройства, и безредукторный, в котором электродвигатель непосредственно соединен с исполнительным органом. По роду электрического преобразовательного устройства различают: вентильный электропривод, преобразовательным устройством которого является вентильный преобразователь энергии. Разновидностями вентильного электропривода являются ионный и полупроводниковый электроприводы. Полупроводниковый электропривод, в свою очередь, делится на тиристорный и транзисторный электроприводы, преобразовательным устройством в которых является соответственно тиристорный или транзисторный преобразователь электроэнергии; система управляемый выпрямитель ‑ двигатель (УВ ‑ Д) ‑ вентильный электропривод постоянного тока, преобразовательным устройством которого является регулируемый выпрямитель; система преобразователь частоты ‑ двигатель (ПЧ ‑ Д) ‑ вентильный электропривод переменного тока, преобразовательным устройством которого является регулируемый преобразователь частоты; система; генератор ‑ двигатель (Г ‑ Д) и магнитный усилитель ‑ двигатель (МУ ‑ Д) ‑ регулируемый электропривод, преобразовательным устройством которого является соответственно электромашинный преобразовательный агрегат или магнитный усилитель. По способу передачи механической энергии исполнительному органу электроприводы делятся на индивидуальный, взаимосвязанный и групповой. Индивидуальный электропривод характеризуется тем, что каждый исполнительный орган рабочей машины приводится в движение своим отдельным двигателем. Этот вид привода в настоящее время является основным, так как .при индивидуальном электроприводе упрощается кинематическая передача от двигателя к исполнительному органу, легко осуществляется автоматизация технологического процесса, улучшаются условия обслуживания рабочей машины. Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между собой электроприводов. Частным случаем взаимосвязанного электропривода является многодвигательный электропривод, при котором несколько двигателей работают на общий вал, приводя в движение один исполнительный орган. Групповой электропривод характеризуется тем, что от одного двигателя приводится в движение несколько исполнительных органов одной или нескольких рабочих машин. Такая система электропривода, широко применявшаяся на раннем этапе его развития, имеет разветвленную кинематическую цепь (трансмиссию), что усложняет ее эксплуатацию и автоматизацию технологических процессов.
B.5. КРАТКИЙ ИСТОРИЧЕСКИЙ ОЧЕРК РАЗВИТИЯ ЭЛЕКТРОПРИВОДА
История электропривода начинается в 30—40-х годах XIX в. с создания петербургским академиком Б. С. Якоби электрического двигателя постоянного тока. Этот двигатель был установлен на небольшом судне, которое в 1883 г. сделало несколько рейсов по Неве. Однако из-за отсутствия экономичных источников электроэнергии дальнейшего развития электропривод постоянного тока не получил, и вплоть до конца XIX в. основными типами двигателей являлись паровой и водяной, осуществлявшие с помощью трансмиссий групповой привод рабочих машин. Предпосылкой для создания экономичных промышленных электроприводов явилась разработка многофазных систем переменного тока и открытие в 80-е годы Г. Феррарисом и Н. Тесла явления вращающегося магнитного поля. Особое значение для развития электропривода имела разработка русским инженером М. О. Доливо-Добровольским основ теории наиболее экономичной ‑ трехфазной системы переменного, тока и создание в 1889 г. самого распространенного ныне трехфазного асинхронного двигателя. С этого времени начинается эпоха широкого производства и всестороннего использования электрической энергии и бурное развитие электрического привода. Так, если в 1890 г. доля мощности электродвигателей составляла только 5% мощности всех установленных двигателей, то в 1927 г. ‑ уже 75, а в настоящее время она близка к 100 %. В нашей стране уже в первые годы Советской власти по указанию В. И. Ленина и под руководством Коммунистической партии ученые и инженеры создали государственный план электрификации России ‑ ГОЭЛРО, который положил начало электрификации страны. План ГОЭЛРО был успешно выполнен. В годы пятилеток продолжалось широкое строительство тепловых и гидравлических электростанций. Из года в год росла выработка электроэнергии, что создавало предпосылки для полной электрификации народного хозяйства страны и широкого использования электрического привода. К 1960 г. коэффициент электрификации в угольной промышленности достиг 99, в металлургической 87, в химической 98, в машиностроительной 98,5%. Такой быстрый рост электровооруженности труда позволил резко повысить его производительность и на этой основе успешно решить многие экономические и социальные задачи развития нашей страны. Широкому внедрению и совершенствованию электропривода способствовало создание мощной электротехнической промышленности и целой сети научно-исследовательских и проектных институтов. От электромашинной техники управления электроприводами к ионной, от ионных приборов и устройств к системам управления на магнитных усилителях, от магнитных усилителей к полупроводниковой технике управления ‑ такие этапы развития прошел автоматизированный электропривод благодаря целенаправленной работе многих организаций и предприятий, таких, как ХЭМЗ, «Электросила», «Динамо», ВНИИэлектропривод, ВНИПИ «Тяжпромэлектропроект», ЭНИМС и многих других: Большой вклад в становление и развитие автоматизированного электропривода внесли и продолжают вносить Высшие учебные заведения. В трудах советских ученых С. А. Ринкевича, В. К. Попова, А. Т. Голована, Д. П. Морозова, Н. П. Костенко, В. С. Кулебакина, М. Г. Чиликина, А. С. Сандлера и др. разработаны основы теории электропривода. Созданные ими научные монографии и учебники являются фундаментальными трудами в области автоматизированного электропривода, по которым учились и продолжают учиться все поколения электроприводчиков. Эти книги стали классическими трудами в области электропривода и изданы во многих странах мира. Зародившись полтора века тому назад, электропривод в настоящее время переживает период бурного развития и совершенствования. Это • в первую очередь определяется тем, что все новые открытия и достижения в смежных областях науки и техники ‑ в электромашиностроении и электроаппаратостроении, в вычислительной технике и электронике, в теории автоматического управления и регулирования ‑ сразу же начинают использоваться в теории и практике электропривода, позволяя создавать более совершенные автоматизированные системы. Так, в свое время поистине революционизирующее влияние на развитие электропривода оказали разработка и производство полупроводниковых управляемых вентилей ‑ тиристоров. Созданные на их основе полупроводниковые преобразователи постоянного и переменного тока постепенно заменили применявшиеся до этого электромашинные и ионные преобразователи, позволив резко повысить технико-экономические показатели электроприводов. Большое значение для развития электропривода имеют успехи микроэлектроники и создаваемой на этой базе микропроцессорной техники. Применение управляющих вычислительных машин (УВМ) в электроприводе открывает новые горизонты его развития и сулит получение значительного технико-экономического эффекта при автоматизации сложных технологических процессов. Новые возможности для электропривода связаны с созданием и применением электрических двигателей специального назначения. К их числу относятся линейные электродвигатели поступательного движения, малоинерционные двигатели с гладким, полым или дисковым якорем, многокоординатные шаговые двигатели, двигатели с катящимся и волновым роторами и др. Использование в электроприводе таких двигателей позволяет повысить его быстродействие и точность работы, в ряде случаев упростить или совсем устранить механическое передаточное устройство, обеспечить несколько степеней свободы движения исполнительного органа, повысить экономичность работы привода и т. д. Современный автоматизированный электропривод ‑ это высоконадежная и экономичная электромеханическая система, способная полностью обеспечить автоматизацию любого технологического процесса, достигнуть высокого быстродействия и точности при своей работе, улучшить условия труда обслуживающего персонала.
Глава первая МЕХАНИКА ЭЛЕКТРОПРИВОДА 1.1 УРАВНЕНИЯ МЕХАНИЧЕСКОГО ДВИЖЕНИЯ Механическое движение от вала двигателя к исполнительному органу передается с помощью механического передаточного устройства (МПУ) (см. рис. В.1), которое в общем случае включает в себя различные механические элементы ‑ шестерни, канаты, валы, муфты сцепления, шкивы и т. д. Эти элементы вращаются или движутся поступательно с разной скоростью, имеют определенную жесткость и момент инерции (массу), а соединения между ними в общем случае содержат зазоры. Наличие этих свойств элементов МПУ вносит определенные искажения в процесс передачи движения от двигателя к исполнительному органу и требует соответствующего учета. Анализ механического движения осуществляется с помощью расчетных схем электропривода, получаемых по определенным правилам. Механическое движение элементов электропривода описывается с помощью законов электромеханики. Из курса физики известно, что движение материального тела определяется вторым законом Ньютона, причем уравнение этого движения имеет вид: для твердого тела, вращающегося вокруг неподвижной оси,
и для поступательно движущегося тела
где
называются условиями установившегося движения и в дальнейшем будут часто использоваться. Поскольку при движении тела вокруг неподвижной оси или при поступательном движении тела вдоль прямолинейной оси все векторные величины направлены вдоль одной оси, то вместо них можно использовать скалярные величины. Поэтому в дальнейшем не используется запись уравнений движения в векторном виде. Нахождение зависимостей скорости движения от времени w(t) и u(t) осуществляется путем решения (интегрирования) уравнений (1.1), (1.2). При этом должны быть известны момент инерции
В некоторых случаях момент инерции
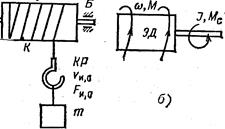
1.2 РАСЧЕТНЫЕ СХЕМЫ МЕХАНИЧЕСКОЙ ЧАСТИ ЭЛЕКТРОПРИВОДА Элементы механической части привода механически связаны друг с другом и образуют единую кинематическую Цепь от двигателя к исполнительному органу. Каждый элемент имеет свою скорость движения и характеризуется моментом инерции или массой, а также совокупностью действующих на него моментов или сил. Движение любого элемента описывается одним из уравнений (1.1), (1.2), при использовании которых должно быть учтено взаимодействие этого элемента с остальной частью кинематической цепи, что удобно осуществлять путем приведения моментов и усилий, а также моментов инерции и масс. В результате • выполнения этой операции приведения реальная кинематическая схема заменяется расчетной энергетически эквивалентной схемой, основу которой составляет тот элемент, движение которого рассматривается. Приведение указанных величин может быть осуществлено к любому элементу механической части электропривода, но, как правило, этим элементом является вал электродвигателя. Это позволяет наиболее полно исследовать характер движения привода и режим его работы, точнее формировать законы движения. Зная параметры кинематической схемы, можно определить и вид движения исполнительного органа. В некоторых более редких случаях поступают наоборот, осуществляя приведение всех величин к исполнительному органу. Для выявления существа операции приведения обратимся к рис. 1.1,а, на котором показана кинематическая схема электропривода подъемной лебедки. Двигатель ЭД через соединительную муфту M1, редуктор Р и муфту М2 приводит во вращение барабан Б, на котором навит канат К. К концу каната, прикреплен крюк лебедки Кр (исполнительный орган механизма), к которому подвешивается груз массой т. Нагрузка электропривода определяется действием силы тяжести, а также трением движущихся частей.
Рис. 1.1. Схема механической части электропривода: а — реальная; б — приведенная расчетная
Этот вид нагрузки привода, называемый обычно потерями на трение, учитывается КПД редуктора Приведение момента нагрузки осуществляют исходя из равенства механической мощности нагрузки двигателя в реальной (рис. 1.1, а) и эквивалентной (рис. 1.1, 6) схемах. Приведение момента нагрузки выполняют двумя способами в зависимости от направлений потока энергии в механической части. Если производится подъем груза, то двигатель совершает полезную работу по подъему груза и покрывает потери мощности на трение в кинематической цепи. Энергия направляется от двигателя к исполнительному органу, и баланс мощностей в этом случае имеет вид
откуда
где МС ‑ приведенный к валу двигателя момент нагрузки (сопротивления); w — угловая скорость ротора двигателя; Fи,о ‑ сила тяжести; uи,о ‑ скорость подъема груза; При опускании груза теряемая им потенциальная энергия передается к двигателю. Поэтому потери на трение в кинематической цепи покрываются уже за счет этой энергии, и баланс мощностей имеет вид
откуда
По. аналогии с рассматриваемым случаем, если исполнительный орган совершает вращательное движение со скоростью
где Формула (1.7) справедлива при направлении потока энергии от двигателя к исполнительному органу, формула (1.8) ‑ при обратном направлении. Приведение моментов инерции и масс элементов осуществляют исходя из равенства запаса кинетической энергии в реальной и эквивалентной расчетной схемах
откуда находим
где J—приведенный к валу двигателя момент инерции элементов МПУ; JД ‑ момент инерции двигателя, муфты Ml и шестерни z1 , Jб ‑ момент инерции шестерни z2,, муфты М2 и барабана Б. Обобщая полученный результат, заключаем, что для приведения момента инерции вращающегося элемента к валу двигателя следует разделить момент инерции на квадрат передаточного числа участка кинематической цепи между двигателем и этим элементом, а для приведения массы поступательно движущегося элемента следует умножить массу на квадрат радиуса приведения участка кинематической цепи между двигателем и этим элементом. В результате выполнения приведения по указанным правилам расчетная схема имеет вид рис. 1.1, б. Отметим, что расчетная схема рис. 1.1, б в теории электропривода получила название одномассовой механической системы. Она соответствует механической части привода с абсолютно жесткими элементами и без зазоров. Применительно к приведенной расчетной схеме рис. 1.1, б уравнение движения в векторной форме имеет вид
Для указанных на рис. 1.1, б направлений моментов двигателя и нагрузки, которые относятся к самому распространенному двигательному режиму работы электропривода, когда движение осуществляется под действием вращающего момента двигателя, а момент нагрузки противодействует движению, уравнение (1.10) в скалярной форме записывается как
Правую часть уравнений (1.10) и (1.11) называют динамическим моментом, т.е.
Основные положения данного параграфа, полученные для наиболее распространенных в настоящее время двигателей вращательного движения, полностью применимы и к двигателям поступательного движения. Пример 1.1. Применительно к схеме рис. 1.1, а рассчитать значения J и Mc при подъеме груза. Дано: моменты инерции двигателя вместе с муфтой Ml и шестерней z1 JД = 0,15 кг×м2, а барабана вместе с муфтой М2 и шестерней z2 Jб = 1,8 кг-м2; передаточное число редуктора iР = z2/z1 = 86/14=6,14; КПД редуктора hP = 0,97 и барабана hб = 0,95; скорости двигателя w = 93 рад/с и подъема груза υи,о = 0,1 м/с; масса груза вместе с крюком m = 850 кг. Приведенный момент нагрузки MС определяем по (1.5)
где g=9,81 м/с2 ‑ ускорение силы тяжести. Приведенный момент инерции Jнаходим по (1.9)
При спуске груза приведенный момент нагрузки МС должен быть рассчитан по (1.6), а момент инерции остается неизменным.
Поиск по сайту: |

 (1.1)
(1.1) (1.2)
(1.2) и
и  ‑ векторные суммы моментов или сил, действующих на тело;
‑ векторные суммы моментов или сил, действующих на тело;  и
и  ‑ момент инерции и масса тела;
‑ момент инерции и масса тела; ‑ угловое ускорение вращающегося тела;
‑ угловое ускорение вращающегося тела; ‑ ускорение поступательно движущегося тела. Эти уравнения позволяют однозначно определить характер механического движения электропривода. Если
‑ ускорение поступательно движущегося тела. Эти уравнения позволяют однозначно определить характер механического движения электропривода. Если  или
или  , то электропривод совершает движение с ускорением. В другом случае, когда
, то электропривод совершает движение с ускорением. В другом случае, когда  или
или  , электропривод движется с установившейся скоростью или находится в состоянии покоя. Выражения
, электропривод движется с установившейся скоростью или находится в состоянии покоя. Выражения ;
;  ;
;  (1.4)
(1.4)
 и барабана
и барабана  . После приведения моментов инерции, масс и сил в схеме рис. 1.1, а к валу двигателя получаем эквивалентную расчетную схему рис. 1.1,6, в которой подлежат определению приведенные значения момента нагрузки (сопротивления) МС. и момента инерции
. После приведения моментов инерции, масс и сил в схеме рис. 1.1, а к валу двигателя получаем эквивалентную расчетную схему рис. 1.1,6, в которой подлежат определению приведенные значения момента нагрузки (сопротивления) МС. и момента инерции 
 (1.5)
(1.5) ‑ радиус приведения кинематической цепи между двигателем и исполнительным органом.
‑ радиус приведения кинематической цепи между двигателем и исполнительным органом.
 (1.6)
(1.6) и создает при этом момент нагрузки Ми,о приведенный к валу двигателя момент нагрузки Мс определится по одной из формул
и создает при этом момент нагрузки Ми,о приведенный к валу двигателя момент нагрузки Мс определится по одной из формул ; (1.7)
; (1.7) , (1.8)
, (1.8) ‑ передаточное число кинематической цепи между валом двигателя и исполнительным органом; h — КПД этой цепи.
‑ передаточное число кинематической цепи между валом двигателя и исполнительным органом; h — КПД этой цепи. ,
, , (1.9)
, (1.9) (1.10)
(1.10) (1.11)
(1.11) (1.12)
(1.12) Н·м,
Н·м, кг×м2.
кг×м2.