Зміст роботи. На місцевості побудована мережа у вигляді геодезичного чотирикутника. Відомі координати двох вихідних пунктів і значення виміряних напрямків всередині чотирикутника. Необхідно знайти координати двох шуканих пунктів, які максимально відповідали б їх дійсним значенням.
Робота складається з двох етапів: зрівнювання результатів вимірювань параметричним методом; оцінка точності вимірювань.
Вихідні дані. Видаються викладачем за індивідуальним номером варіанту.
Задача. За відомими координатами вихідних пунктів і (табл. 6) і виміряними напрямками (табл. 5) виконати зрівнювання геодезичного чотирикутника , знайти координати шуканих пунктів і , та виконати оцінку точності вимірювань.
Таблиця 5 – Виміряні напрямки
Станція
Пункт візування
Виміряний напрямок
З
Ц
0° 00' 00.00''
Б
39° 54' 56.15''
Ч
83°45' 10.40''
Ц
З
0° 00' 00.00''
Б
262° 07' 42.15''
Ч
314° 24' 44.61''
Б
З
0° 00' 00.00''
Ц
42° 12' 46.55''
Ч
321° 38' 06.33'
Ч
З
0° 00' 00.00''
Ц
50° 39' 35.69''
Б
97° 47' 50.32''
Спочатку будуємо схему геодезичної мережі в масштабі 1:50000 (рис. 2). Для цього на окремому аркуші паперу креслимо дві взаємно перпендикулярні осі – та , і оцифровуємо їх відповідно до заданого масштабу. Початок координат обираємо довільно, але так, щоб схема мала компактні розміри.
Наносимо на схему вихідні пункти і за їх прямокутними координатами та з’єднуємо їх прямою лінією. З вихідних пунктів за допомогою транспортиру будуємо виміряні напрямки (табл. 5) на шукані пункти і .
Рис. 2 –Схема геодезичного чотирикутника
Таблиця 6 – Координати вихідних і шуканих пунктів
Назва пункту
Наближені координати, м
Поправки, м
Вихідні і зрівняні координати, м
-
-
-
-
3123495.600
7017455.084
-
-
-
-
3120644.561
7017479.980
3123892,047
7020148,946
-0,006
-0,011
3123892,041
7020148,935
3120953,964
7020095,120
0,005
-0,031
3120953,969
7020095,090
За виміряними напрямками обчислюємо значення горизонтальних кутів, результати заносимо до табл. 7 (колонка 4). Наприклад, перший кут, виміряний зі станції , буде дорівнювати різниці напрямків на пункти і
Підраховуємо кількість невідомих , якими в даному випадку є координати і шуканих пунктів і , тобто . Число незалежних вимірювань . Число надлишкових вимірювань, відповідно, становить .
Таблиця 7 – Виміряні і зрівняні кути
№ кута
Вільні члени, сек
Кути, обчислені за наближеними координатами
Виміряні кути
Поправ-ки, сек
Зрівняні кути
39° 54' 56.15''
39° 54' 56.15''
-0.24
39° 54' 55.91''
45° 35' 15.39''
45° 35' 15.39''
-0.98
45° 35' 14.41''
52° 17' 02.46''
52° 17' 02.46''
0.66
52° 17' 03.12''
-0.55
42° 12' 46.00''
42° 12' 46.55''
0.02
42° 12' 46.57''
2.99
38° 21' 56.66''
38° 21' 53.67''
1.38
38° 21' 55.05''
0.25
47° 08' 14.88''
47° 08' 14.63''
0.64
47° 08' 15.27''
-1.48
50° 39' 34.21''
50° 39' 35.69''
0.19
50° 39' 35.88''
43° 50' 14.25''
43° 50' 14.25''
-0.44
43° 50' 59.25''
∑
360° 00' 00.00''
359° 59' 58.79''
1.21
360° 00' 00.00''
За виміряними кутами (табл. 7) та координатами вихідних пунктів (табл. 6) обчислюємо наближені координати і шуканих пунктів і . Використовуємо для цього допоміжну схему взаємного розміщення пунктів в трикутнику (рис. 3) і формули Юнга
де – координати лівого пункту і правого пункту відповідно.
– кути трикутника, вершинами яких є відповідно пункти і .
Рис. 3 – Пояснювальна схема до формул (40)
При позначенні вершин трикутника керуються таким правилом: якщо дивитися із середини базисної сторони трикутника на шуканий пункт, то ліворуч буде знаходитися вихідний пункт і виміряний кут , а праворуч – вихідний пункт і виміряний кут .
Застосувавши це правило, виділяємо з чотирикутника два трикутники – і .
Підставляємо в формули (40) числові значення та отримуємо наближені координати пунктів і . Обчислення виконуємо в табл. 8. Результати заокруглюємо до 0.001 м.
Таблиця 8 – Обчислення наближених координат шуканих пунктів
Назва пункту
Виміряні кути
Координати
Ц
97° 52' 17.85''
3123495,600
7017455,084
З
39° 54' 56.15''
3120644,561
7017479,980
Б
3123892,047
7020148,946
Ц
45° 35' 15.39''
3123495,600
7017455,084
З
83° 45' 10.40''
3120644,561
7017479,980
Ч
3120953,964
7020095,120
Обчислені наближені координати пунктів і заносимо до табл. 6. Складаємо рівняння поправок до виміряних кутів
де – поправки до наближених координат;
– вільний член рівняння поправок;
– поправка до виміряного кута.
Вільні члени рівнянь поправок обчислюємо за формулою
(41)
де – виміряний кут;
– кут, обчислений за наближеними координатами.
Кути, обчислені за наближеними координатами, отримуємо із виразу
Для спрощення обчислень заповнюємо табл. 9, в якій представляємо коефіцієнти рівнянь поправок в буквеному позначенні.
Таблиця 9 – Коефіцієнти рівнянь поправок в буквеному позначенні
Пункт
Кут
Поправки до наближених координат
-------------------
-------------------
-------------------
-------------------
-------------------
-------------------
-------------------
-------------------
Підставивши в формулу (42), вихідні координати пунктів і та наближені координати пунктів і , обчислюємо тангенси кутів . Значення кутів отримуємо через арктангенс. Обчислення представлені в табл. 10. Контроль обчислень – сума кутів повинна дорівнювати 360°.
Кути, обчислені за наближеними координатами, заносимо до табл. 10 (колонка 3). За формулою (41) обчислюємо вільні члени рівнянь поправок, результати заносимо до табл. 7 (колонка 2).
Таблиця 10 – Обчислення кутів за наближеними координатами
№ кута
Напрямок
Приріст
Тангенс кута
Значення кута
ЗЦ
2851,039
-24,896
0,83659243
39° 54' 56.15''
ЗБ
3247,486
2668,966
ЦЧ
309,403
2615,140
-9,13519097
45° 35' 15.39''
ЦЗ
-2851,039
24,896
ЦБ
396,447
2693,862
1,29310312
52° 17' 02.46''
ЦЧ
-2541,636
2640,036
БЗ
-3247,486
-2668,966
0,90715109
42° 12' 46.00''
БЦ
-396,447
-2693,862
БЧ
-2938,083
-53,826
0,79161705
38° 21' 56.66''
БЗ
-3247,486
-2668,966
ЧЦ
2541,636
-2640,036
1,07754038
47° 08' 14.88''
ЧБ
2938,083
53,826
ЧЗ
-309,403
-2615,140
1,22000091
50° 39' 34.21''
ЧЦ
2541,636
-2640,036
ЗБ
3247,486
2668,966
0,96021571
43° 50' 14.25''
ЗЧ
309,403
2615,140
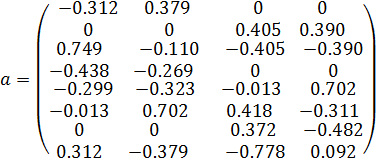
За виразами, наведеними в табл. 9, використовуючи значення і з табл. 13, обчислюємо значення коефіцієнтів рівнянь поправок. Щоб не отримувати занадто великих значень коефіцієнтів рівнянь поправок і з метою запобігання втрати точності обчислень, зменшимо постійну в 100 разів, тобто приймемо .
З числових значень коефіцієнтів рівнянь поправок формуємо матрицю .
.
Транспонуємо матрицю і помножимо її на таку ж матрицю. В результаті отримаємо матрицю коефіцієнтів нормальних рівнянь .
Знаходимо матрицю, обернену до матриці .
.
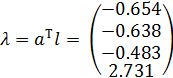
Обчислюємо матрицю-стовбець вільних членів нормальних рівнянь .
.
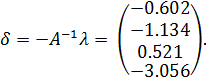
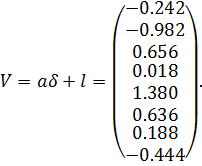
Обчислюємо вектор-стовбець поправок до наближених координат пунктів і . Результати отримуємо в сантиметрах.
Отримані поправки заносимо до табл. 6, попередньо зменшивши їх в 100 разів, щоб розмірність була в метрах.
Знаходимо в табл. 6 значення зрівняних координат шуканих пунктів і .
Обчислюємо вектор-стовбець поправок до виміряних кутів. Результати отримуємо в секундах.
Отримані результати заносимо до табл. 7 і обчислюємо зрівняні кути. Для контролю обчислень знаходимо суму зрівняних кутів, – вона повинна дорівнювати 360° 00' 00.00''. В даному випадку умова виконується.
На цьому зрівнювання результатів вимірювань завершено. Після зрівнювання виконуємо оцінку точності вимірювань.
Обчислюємо емпіричну середню квадратичну похибку виміряного кута за формулою
де – поправка до виміряного кута;
– кількість вимірювань;
– кількість невідомих.
Оцінюємо надійність емпіричної середньої квадратичної похибки за формулою
Обчислюємо середню квадратичну похибку зрівняного кута за формулою
Позначивши , знаходимо середні квадратичні похибки положення шуканих пунктів і за осями координат, використовуючи діагональні елементи матриці
.
Пункт Пункт
Знаходимо кругові середні квадратичні похибки положення пунктів і за формулою
Використовуючи елементи матриці , знаходимо параметри еліпсів похибок (рис. 4), орієнтування і розміри осей якого визначають найбільш вірогідні напрямки і величину максимальної і мінімальної середньої квадратичної похибки положення пунктів і .
b
P
a
Y
V
U
Рис. 4 – Параметри еліпсу похибок
Кут повороту осей еліпсу похибок знаходимо із виразу
де – елементи матриці .
Якщо кут , обчислений за формулою (47) приймає від’ємне значення, додаємо до нього 180°.
Пункт Б
Пункт Ч
Із матриці виділяємо 2 блоки: перший відповідає пункту Б, другий – пункту Ч (в тому порядку, в якому вони були внесені до табл. 9).
Пункт Б
Пункт Ч
Розміри великої і малої напіввісі еліпсів похибок, відповідно, обчислюємо за формулами
де елементи і дорівнюють
Отже, підставивши числові значення елементів матриці у вирази (48) і (49), отримаємо такі результати
Пункт Б Пункт Ч
За обчисленими параметрами еліпсів похибок ( ), будуємо їх на схемі геодезичної мережі (рис. 5).
 виділяємо 2 блоки: перший відповідає пункту Б, другий – пункту Ч (в тому порядку, в якому вони були внесені до табл. 9).
виділяємо 2 блоки: перший відповідає пункту Б, другий – пункту Ч (в тому порядку, в якому вони були внесені до табл. 9).
 і
і  (табл. 6) і виміряними напрямками (табл. 5) виконати зрівнювання геодезичного чотирикутника
(табл. 6) і виміряними напрямками (табл. 5) виконати зрівнювання геодезичного чотирикутника  , знайти координати шуканих пунктів
, знайти координати шуканих пунктів  і
і  , та виконати оцінку точності вимірювань.
, та виконати оцінку точності вимірювань. та
та  , і оцифровуємо їх відповідно до заданого масштабу. Початок координат обираємо довільно, але так, щоб схема мала компактні розміри.
, і оцифровуємо їх відповідно до заданого масштабу. Початок координат обираємо довільно, але так, щоб схема мала компактні розміри.











 , якими в даному випадку є координати
, якими в даному випадку є координати  . Число незалежних вимірювань
. Число незалежних вимірювань  . Число надлишкових вимірювань, відповідно, становить
. Число надлишкових вимірювань, відповідно, становить  .
. і
і 

 – координати лівого пункту
– координати лівого пункту  і правого пункту
і правого пункту  відповідно.
відповідно. – кути трикутника, вершинами яких є відповідно пункти
– кути трикутника, вершинами яких є відповідно пункти 
 , а праворуч – вихідний пункт
, а праворуч – вихідний пункт  .
. і
і  .
.

 – поправки до наближених координат;
– поправки до наближених координат; – вільний член рівняння поправок;
– вільний член рівняння поправок; – поправка до виміряного кута.
– поправка до виміряного кута. (41)
(41) – виміряний кут;
– виміряний кут; – кут, обчислений за наближеними координатами.
– кут, обчислений за наближеними координатами.




























 і
і  та наближені координати пунктів
та наближені координати пунктів  і
і  . Значення кутів отримуємо через арктангенс. Обчислення представлені в табл. 10. Контроль обчислень – сума кутів повинна дорівнювати 360°.
. Значення кутів отримуємо через арктангенс. Обчислення представлені в табл. 10. Контроль обчислень – сума кутів повинна дорівнювати 360°.



 і
і  з табл. 13, обчислюємо значення коефіцієнтів рівнянь поправок. Щоб не отримувати занадто великих значень коефіцієнтів рівнянь поправок і з метою запобігання втрати точності обчислень, зменшимо постійну
з табл. 13, обчислюємо значення коефіцієнтів рівнянь поправок. Щоб не отримувати занадто великих значень коефіцієнтів рівнянь поправок і з метою запобігання втрати точності обчислень, зменшимо постійну  в 100 разів, тобто приймемо
в 100 разів, тобто приймемо  .
. .
. .
. .
.

 .
. .
. .
.

 – поправка до виміряного кута;
– поправка до виміряного кута; – кількість вимірювань;
– кількість вимірювань;


 , знаходимо середні квадратичні похибки положення шуканих пунктів
, знаходимо середні квадратичні похибки положення шуканих пунктів 
 .
.



 і
і  за формулою
за формулою






 – елементи матриці
– елементи матриці  , обчислений за формулою (47) приймає від’ємне значення, додаємо до нього 180°.
, обчислений за формулою (47) приймає від’ємне значення, додаємо до нього 180°.
 Пункт Ч
Пункт Ч





 і
і  дорівнюють
дорівнюють





 ), будуємо їх на схемі геодезичної мережі (рис. 5).
), будуємо їх на схемі геодезичної мережі (рис. 5).