|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
П.3 Физический маятникСтр 1 из 10Следующая ⇒
Часть: Колебания и волны. Процессы, повторяющиеся во времени называются колебаниями или колебательными процессами. Тело или система, участвующие в колебательном процессе, называются колебательной системой или осциллятором.
Глава: Механические колебания. Маятники. Рассмотрим три механические колебательные системы, которые называются маятниками. П.1 Пружинный маятник. Пружинный маятник представляет собой цилиндрическую пружинку жесткостью
Будем считать пружину невесомой, а силу тяжести, действующую на грузик много меньшей силы упругости пружины. Запишем уравнение 2-го закона Ньютона для грузика.
Спроецируем на ось
где
П.2 Математический маятник. Математическим маятником называется материальная точка, подвешенная на нерастяжимой нити или невесомом подвесе. Материальная точка массой
Обозначим:
Запишем 2-й закон Ньютона
Спроецируем уравнение на ось, совпадающую с направлением мгновенной скорости
Выразим угол
Далее
Пусть выполняется условие малых отношений маятника:
Тогда получим уравнение:
п.3 Физический маятник. Твердое тело подвешено на горизонтальной оси Если наклонить тело от вертикали, то начнется колебательное движение. Обозначим
Рассмотрим основное уравнение динамики твердого тела для указанного положения маятника
Направление оси вращения и вектора Здесь:
Запишем:
Рассмотрим малые колебания, удовлетворяющие условию
Тогда
Свободные колебания. Колебания, возникающие в отсутствие переменных внешних воздействий на осциллятор, называются свободными. Полученные выше уравнения можно записать в общем виде
где
Решение уравнения ищем в виде:
где Общее решение дифференциального уравнения имеет вид
Итак, получим решение в виде
где После дальнейших преобразований можно привести
Здесь:
Найдем модуль максимального смещения осциллятора.
Амплитуда колебаний численно равна модулю максимального смещения осциллятора от положения равновесия. Для нахождения амплитуды
Фазу колебаний будем обозначать:
Начальная фаза равна:
Функции
Поиск по сайту: |
 , закрепленную одним концом. К другому концу прикреплен грузик массой
, закрепленную одним концом. К другому концу прикреплен грузик массой  . Если оттянуть грузик и отпустить, то начнутся колебания. Выберем ось
. Если оттянуть грузик и отпустить, то начнутся колебания. Выберем ось  так, чтобы ее начало совпадало с положением груза когда пружина не деформирована.
так, чтобы ее начало совпадало с положением груза когда пружина не деформирована.
 ,
,  .
. ,
, ,
,  ,
, ,
, .
. . Пусть маятник движется, как показано на рисунке.
. Пусть маятник движется, как показано на рисунке.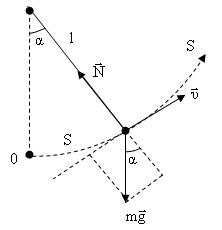
 - путь, пройденный материальной точкой, отсчитанный от положения равновесия 0 вдоль траектории.
- путь, пройденный материальной точкой, отсчитанный от положения равновесия 0 вдоль траектории. .
.
 .
. через длину дуги
через длину дуги 
 ,
, ,
, .
. ,
,  ,
,  .
. .
. и может свободно вращаться относительно нее. Точка
и может свободно вращаться относительно нее. Точка  - центр масс. Проведем отрезок
- центр масс. Проведем отрезок  и обозначим его длину
и обозначим его длину  . Проведем вертикаль через точку
. Проведем вертикаль через точку  . Масса тела равна
. Масса тела равна 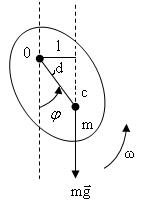
 .
. указано на рисунке.
указано на рисунке. - проекция момента силы
- проекция момента силы  - момент инерции относительно той же оси.
- момент инерции относительно той же оси. ,
,  ,
, ,
, ,
, .
. ,
,  .
. .
. ,
, - величина, характеризующая систему.
- величина, характеризующая систему. ,
, ,
, ,
,  ,
, ,
,  ,
, - мнимая единица.
- мнимая единица. .
. ,
, 
 ,
,  - некоторые константы.
- некоторые константы. .
. 
 ,
, - амплитуда колебаний,
- амплитуда колебаний,  ,
, - круговая (циклическая) частота колебаний или собственная (круговая) частота системы,
- круговая (циклическая) частота колебаний или собственная (круговая) частота системы,  ,
, - фаза колебаний,
- фаза колебаний,  ,
, .
. , например,
, например,  и
и  .
.
 ,
, ,
, ,
, .
. .
. ,
, .
.