|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Расчёт динамических характеристик привода ⇐ ПредыдущаяСтр 5 из 5
В результате расчёта должна быть проверена устойчивость ЭГУ, определён коэффициент усиления разомкнутого контура привода К, в случае необходимости выбраны корректирующие устройства, которые виде регуляторов включаются в цепь управления приводом.
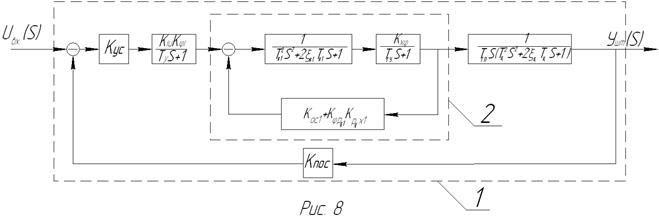
Определение коэффициента усиления разомкнутого контура привода На схеме (рис. 8) показаны два замкнутых контура – основной 1 и контур 2, соответствующий ЭГУ. Все звенья, входящие в эти контуры, являются типовыми, постоянные времени и коэффициенты передачи большинства, из которых могут быть вычислены по приведённым ниже формулам после подстановки в них значений, полученных при расчёте элементов привода:
V0 = ymax · Sц = ymax · πDц2/4 = 0,17 · 3,14 · (14·10-3)2 / 4 = 2,6·10-5 .
Постоянная времени
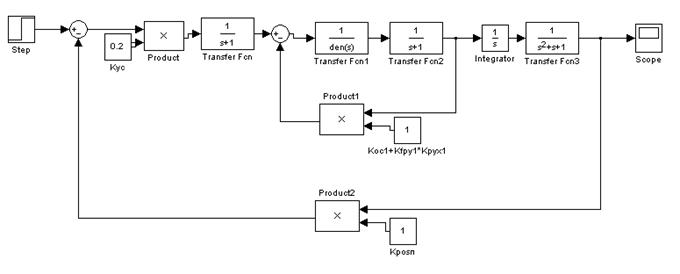
где Ly = 100 Гц, Ry = 20 Ом ― индуктивность и активное сопротивление обмотки управления ЭМП; Rвых = 100 Ом ―активное сопротивление выходного канала усилителя электрических сигналов. Расчёт на ЭВМ переходного процесса, Вызванного ступенчатым изменением сигнала управления приводом Для расчёта переходного процесса на ЭВМ может быть использована программа МВТУ. Если при определении коэффициента усиления разомкнутого контура привода были введены корректирующие звенья, то в программу расчета должны быть включены в безразмерном виде уравнения этих звеньев. Кроме того, во всех блоках программы необходимо исправить число переменных и указать дополнительные исходные данные. Кус = 10; Кпос = iymax / xзmax = 1.73 / 0.7·10-3 = 2303.5
Рис. 9. Схема ЭГУ, выполненная в программе Mathlab, Simulink
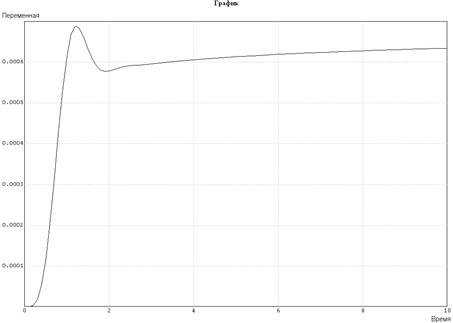
Заключение В процессе выполнения задания были приобретены навыки расчета следящего электрогидравлического привода и определения его основных параметров. Также были подсчитаны статические и динамические характеристики электрогидравлического привода. В процессе выполнения задания, на основе полученных данных на ЭВМ была составлена принципиальная структурная схема данного электрогидравлического привода. По результатам анализа схемы делаем вывод, что система при:
Кпос = 2303 Кус = 10;
не устойчива!
Рис. 10. Система не устойчива
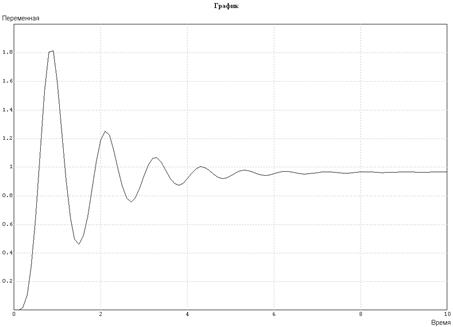
А при:
Кпос = 1 Кус = 1000;
устойчива!
Рис. 11. Система устойчива
Поиск по сайту: |
 ;
;  ;
; 
 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
; ;
;  ;
;  ;
;  ;
;  ;
;  ;
;
 и коэффициенты относительного демпфирования
и коэффициенты относительного демпфирования  и
и  могут быть назначены на основании статистических данных, а постоянная времени
могут быть назначены на основании статистических данных, а постоянная времени  и коэффициент передачи
и коэффициент передачи  вычислены по соотношениям
вычислены по соотношениям сек;
сек;  ,
,
 с
с с
с с
с
 с
с с
с