|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
РЕГУЛИРОВАНИЕ СКОРОСТИ, ТОКА И МОМЕНТА ДПТ НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ С ПОМОЩЬЮ РЕЗИСТОРОВ В ЦЕПИ ЯКОРЯ
Этот способ, часто называемый реостатным, является весьма простым по своей реализации и поэтому широко используется для регулирования скорости, тока и момента ДПТ. Семейство искусственных (регулировочных) характеристик ДПТ можно получить, проанализировав, например, как изменяется скорость холостого ДПТ w0 и наклон его характеристик при варьировании сопротивления добавочного резистора Rд,. Из (3.6а) видно, что w0 не зависит от Rд, поэтому все искусственные характеристики пересекаются на оси скорости в точке с координатой w=w0; I=0; М=0.
Кроме того, наклон характеристики, определяемый перепадом скорости Проведенный анализ позволяет изобразить искомое семейство электромеханических и механических характеристик в виде совокупности линий, показанных на рис. 3.4. При Rд=0 ДПТ имеет естественные механическую и электромеханическую характеристики, на которых находится точка номинального режима с координатами wном, Iном и wном, Мном. а) Регулирование скорости. Оценим данный способ регулирования скорости по основным показателям, рассмотренным в § 2.2. 1. Диапазон регулирования скорости небольшой и обычно не превосходит 2–3. Причина этого заключается в снижении жесткости характеристик по мере увеличения Rд и, как будет показано далее, в значительных потерях мощности при больших диапазонах регулирования скорости. 2. Направление регулирования скорости–вниз от естественной характеристики. 3. Плавность регулирования скорости определяется плавностью изменения Rд. Если сопротивление этого резистора изменяется плавно, то данный способ обеспечивает плавное регулирование скорости, если же Rд изменяется ступенчато, то и регулирование скорости будет неплавным. Чаще всего рассматриваемый способ обеспечивает ступенчатое регулирование скорости. 4. Стабильность скорости снижается по мере увеличения диапазона регулирования и в общем случае является невысокой. 5 Экономичность регулирования скорости оценим, сопоставив требуемые капитальные затраты на реализацию данного способа и стоимость потерь мощности при регулировании. Капитальные затраты на приобретение добавочных резисторов невелики, так как стоимость используемых резисторов обычно мала. В то же время потери мощности и соответственно расход электроприводом электрической энергии и ее стоимость оказываются значительными. Покажем это Потери мощности в ДПТ DР определяются разностью мощностей, потребляемой из сети, P1=UI и полезной механической P2=Mw, отданной с вала,
Выполнив несложные преобразования, получим
где Из (3 9) видно, что уже при снижении скорости в 2 раза по сравнению со скоростью идеального холостого хода w0, т. е. при 6. Допустимую нагрузку ДПТ на искусственных характеристиках найдем, если в (3.3) положим Ф=Фном и I=Iном. Тогда получаемое выражение определит допустимый по условиям нормального нагрева момент ДПТ
который оказывается равным номинальному моменту двигателя Мном. Таким образом, при работе ДПТ на искусственных характеристиках он может быть нагружен моментом нагрузки, равным номинальному моменту ДПТ, находясь при этом в нормальном тепловом режиме. Это заключение полностью справедливо для тех ДПТ независимого возбуждения, у которых условия охлаждения не изменяются по мере снижения их скорости. К таким ДПТ относятся, например ДПТ с независимой внешней вентиляцией и закрытые ДПТ без вентилятора. В тех же случаях, когда ДПТ охлаждается за счет собственного вентилятора на валу, при снижении скорости его охлаждение ухудшается, что требует соответствующего снижения момента нагрузки. Несмотря на не очень высокие технико-экономические показатели, реостатное регулирование скорости из-за простоты своей реализации используется достаточно широко тогда, когда требуется небольшой диапазон регулирования скорости движения исполнительного органа или когда работа на пониженных скоростях имеет кратковременный характер. В частности, такое регулирование применяется в электроприводах подъемных кранов, некоторых металлорежущих станков, лифтов. б) Регулирование (ограничение) тока и момента. Получаемые искусственно характеристики широко используются для регулирования (ограничения) тока и момента ДПТ независимого возбуждения в переходных процессах, в которых ток и момент могут принять недопустимо большие значения для ДПТ. Так, в первый момент пуска ДПТ находится в режиме короткого замыкания (w=0; E=0) и ток короткого замыкания при его пуске по естественной характеристике определяется соотношением Для ограничения тока и момента при пуске в простейшем случае используется одна искусственная характеристика 1 (рис. 3.5). Порядок пуска ДПТ следующий: вначале он начинает работать по характеристике 1 при наличии в цепи якоря добавочного резистора Rд1. Далее при скорости w1 резистор Rд1 закорачивается и ДПТ переходит на естественную характеристику. Сопротивление резистора Rд1 выбирается из условия обеспечения допустимого тока в начальный момент пуска
где Iдоп – допустимый ток. Во многих случаях при пуске ДПТ используется не одна, а несколько искусственных характеристик. Их количество зависит от момента нагрузки электропривода и требований плавности переходных процессов. Динамическое торможение ДПТ осуществляется отключением якоря от сети и замыканием его по схеме рис. 3.2 на резистор Rд2. Двигатель переходит на характеристику динамического торможения 2 (рис. 3.5), по которой и происходит торможение.
Сопротивление резистора Rд2 определяется по допустимому броску тока в первый момент перехода в режим динамического торможения. Так как в этот момент
Реверс или торможение противовключением осуществляется изменением полярности напряжения на якоре ДПТ с одновременным вводом в якорь резистора Rд3. Двигатель переходит на характеристику 3 (рис. 3.5), попадая в режим торможения противовключением. В этом режиме ЭДС и напряжение сети совпадают по направлению, поэтому резистор Rд3 определяется по выражению
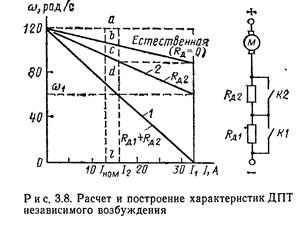
В некоторых случаях для достижения более точного регулирования тока и момента в переходных режимах используется не одна искусственная характеристика, а несколько, как, например, при реализации пусковой диаграммы ДПТ (см. рис. 3.8). Отметим, что в рассматриваемом случае резисторы вводятся в цепь якоря только в переходных режимах работы ДПТ. в) Расчет регулировочных резисторов. Выражения (3.11)–(3.13) позволяют рассчитать сопротивления добавочных резисторов в цепи якоря ДПТ по критерию допустимого тока. Рассмотрим теперь общие методы расчета сопротивлений регулировочных резисторов. Задача формируется следующим образом: известны технические данные ДПТ и его естественная электромеханическая характеристика.
По условиям регулирования скорости, тока или момента задана искусственная характеристика (прямые 1–3 на рис. 3.6). Требуется определить сопротивление добавочного резистора, при включении которого в цепь якоря будет обеспечена заданная характеристика. Метод отрезков. Для получения расчетной формулы этого метода запишем согласно (3.4) выражение для скорости ДПТ на заданной искусственной характеристике при номинальных токе, моменте, магнитном потоке и напряжении
Так как
где Из (3.15) получаем следующее соотношение:
которое отражает очень важное свойство ДПТ: относительный перепад скорости ДПТ
Таким образом, для нахождения Rдследует по характеристикам определить длины отрезков bc и ad при номинальном токе, рассчитать номинальное сопротивление Данный метод справедлив также и при расчете резисторов в схеме динамического торможения. Опуская вывод, который может быть сделан аналогичным образом, приведем окончательную формулу для расчета Rд,т, обеспечивающего характеристику динамического торможения вида 2 на рис. 3.6,
Отметим, что характеристика 3 на этом рисунке соответствует Rд,т=0 и располагается параллельно естественной характеристике. Метод пропорций. При применении этого метода используется выражение для перепада скорости Dw на характеристиках ДПТ. Если согласно (3.6) записать выражения для Dw на естественной и искусственной электромеханической или механической характеристике при одном и том же токе Ii или моменте Мi (рис. 3.6), а затем найти их отношение, то получится следующая пропорция:
Определяя из (3.21) Rд, получаем формулу для расчета Rд методом пропорций
Значения Dwe и Dwи находятся, как и ранее, по характеристикам рис. 3.6. При расчетах регулировочных резисторов в цепях якоря ДПТ независимого возбуждения необходимо знать собственное сопротивление якоря ДПТ Rя. Назовем возможные способы его нахождения.
1. Некоторые заводы-изготовители приводят в каталогах значение Rя. 2. В справочной литературе по электрическим машинам, например [41], даются обобщенные зависимости относительного сопротивления якоря 3. При наличии ДПТ сопротивление Rя может быть определено экспериментально, путем непосредственного измерения его между щетками ДПТ 4. При невозможности воспользоваться указанными выше способами может быть применена следующая приближенная формула для определения Rя по номинальным паспортным данным ДПТ:
где hном – номинальный КПД двигателя. 5. При наличии экспериментально снятой электромеханической или механической характеристики ДПТ значение Rя может быть определено по методу отрезков с помощью формулы (3.19). Пример 3.1. Рассчитать и построить естественные электромеханическую и механическую характеристики ДПТ, имеющего следующие паспортные данные: Рном=2,2 кВт; Uном=220 В; Iном=13 А; nном=1000 об/мин; hном =77 %; Iв,ном=0,73 А; Rо,в=300 Ом. Для построения искомых характеристик, которые представляют собой прямые линии, достаточно определить координаты двух точек: номинального режима и холостого хода 1. Для точки номинального режима определяем номинальную угловую скорость
номинальный момент
номинальное сопротивление ДПТ
2. Далее по приближенной формуле (3.23) находим сопротивление якорной цепи
3. Используя (34), определяем значение
4. Скорость идеального холостого хода согласно (3.6а) равна
5. По координатам точек холостого хода (w0, 0) и номинального режима (wном, Iном) на рис 38 построена естественная электромеханическая характеристика ДПТ независимого возбуждения Естественная механическая характеристика также может быть построена по этим же двум точкам Пример 3.2. Расчитать и построить для ДПТ (см. пример 3 1) пусковую диаграмму при использовании двух ступеней пускового резистора. Построение пусковой диаграммы ДПТ осуществляется в следующем порядке. 1. Рассчитывается максимально допустимый при пуске ток I1=Iдоп. Для рассматриваемого примера примем
2. Определяется ток переключенияI2, значение которого можно получить двумя путями; а) подбором с таким расчетом, чтобы число искусственных характеристик равнялось двум, а ток в переходном процессе не превосходил Iдоп; б) расчетом с помощью следующей формулы, которая приводится без вывода:
где т – число заданных ступеней пускового резистора. Методом подбора из рис. 3.8 находим I2=16 А. Отметим, что если пуск ДПТ осуществляется под нагрузкой, то ток I2 должен на 10–20 % превосходить ток нагрузки Iс, т. е. должно соблюдаться равенство: 3. С помощью метода отрезков определяем сопротивление ступеней пускового резистора
Искусственная характеристика I на рис. 3.8 соответствует наличию в цепи якоря обеих ступеней пускового резистора Rд1+Rд2, а характеристика 2–второй ступени Rд2. На рис. 3.8 изображена также схема якорной цепи двигателя при реализации этой пусковой диаграммы.
Поиск по сайту: |
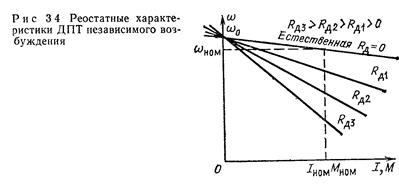
 , пропорционален (при фиксированных значениях тока I и момента М) полному сопротивлению якоря. Поэтому по мере увеличения Rд, наклон характеристик также увеличивается, они становятся более мягкими.
, пропорционален (при фиксированных значениях тока I и момента М) полному сопротивлению якоря. Поэтому по мере увеличения Rд, наклон характеристик также увеличивается, они становятся более мягкими.
 , (3.9)
, (3.9) – относительный перепад скорости.
– относительный перепад скорости. и
и  , половина всей потребляемой из сети мощности P1 идет на потери мощности в самом ДПТ. Таким образом, КПД привода уже при D=2 не превышает 50 %, а при больших диапазонах снижается в еще большей степени
, половина всей потребляемой из сети мощности P1 идет на потери мощности в самом ДПТ. Таким образом, КПД привода уже при D=2 не превышает 50 %, а при больших диапазонах снижается в еще большей степени , (3.10)
, (3.10) . Из-за малости Rя (доли ома или единицы ом)
. Из-за малости Rя (доли ома или единицы ом)  , в то время как допустимый для ДПТ общепромышленного назначения ток
, в то время как допустимый для ДПТ общепромышленного назначения ток  . Таким образом, возникает необходимость ограничения тока (и тем самым момента) при пуске ДПТ, что может быть достигнуто введением в цепь якоря добавочных пусковых резисторов. Такая же необходимость возникает при реверсе и торможении ДПТ независимого возбуждения.
. Таким образом, возникает необходимость ограничения тока (и тем самым момента) при пуске ДПТ, что может быть достигнуто введением в цепь якоря добавочных пусковых резисторов. Такая же необходимость возникает при реверсе и торможении ДПТ независимого возбуждения. , (3.11)
, (3.11)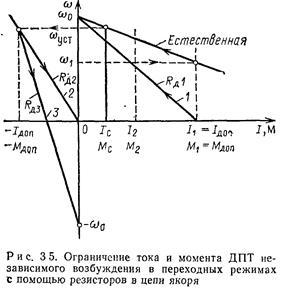
 , то E»U, и сопротивление Rд2 определится как
, то E»U, и сопротивление Rд2 определится как (3.12)
(3.12) . (3.13)
. (3.13)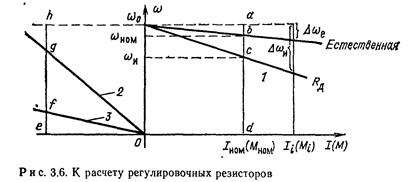
 . (3.14)
. (3.14) , то (3.14) можно записать так:
, то (3.14) можно записать так: (3.15)
(3.15) – так называемое номинальное сопротивление ДПТ, Ом.
– так называемое номинальное сопротивление ДПТ, Ом. , (3.16)
, (3.16) равен относительному активному сопротивлению цепи якоря R/Rном. Отметим, забегая вперед, что это свойство характерно и для других типов двигателей, в частности асинхронных. Пропорцию (3.16) удобно решать графически, для чего обратимся к рис. 3.6. Обозначим на нем характерные точки а, b, с, d и отметим, что
равен относительному активному сопротивлению цепи якоря R/Rном. Отметим, забегая вперед, что это свойство характерно и для других типов двигателей, в частности асинхронных. Пропорцию (3.16) удобно решать графически, для чего обратимся к рис. 3.6. Обозначим на нем характерные точки а, b, с, d и отметим, что  ;
;  . Тогда
. Тогда ; (3.17)
; (3.17) ; (3.18)
; (3.18) . (3.19)
. (3.19) и затем воспользоваться формулой (3.18). Этот же порядок расчета сохраняется тогда, когда исходными являются механические характеристики ДПТ. В этом случае длины отрезков определяются при номинальном моменте.
и затем воспользоваться формулой (3.18). Этот же порядок расчета сохраняется тогда, когда исходными являются механические характеристики ДПТ. В этом случае длины отрезков определяются при номинальном моменте. . (3.20)
. (3.20) . (3.21)
. (3.21) (3.22)
(3.22)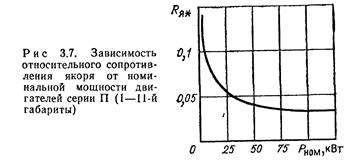
 от мощности Рном для ДПТ некоторых серий. Для примера на рис. 3.7 приведена эта зависимость для ДПТ серии Л (1–11-й габариты).
от мощности Рном для ДПТ некоторых серий. Для примера на рис. 3.7 приведена эта зависимость для ДПТ серии Л (1–11-й габариты). (3.23)
(3.23)







 (3.24)
(3.24)