|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Уравнения Лагранжа II рода (без вывода)
Уравнения Лагранжа второго рода представляют собой дифференциальные уравнения движения несвободной механической системы, составленные в обобщенных координатах.Рассматривается движение системы, состоящей из n материальных точек относительно инерциальной системы отсчета. Наложенные на систему h связей – голономные, удерживающие, нестационарные. Если связи неидеальные, то соответствующие им реакции следует добавить к действующим на систему активным силам. Пусть система имеет s = 3n – h степеней свободы и ее положение определяется q1, q2,…, qi,…, qs обобщенными координатами, а радиус-вектор любой точки этой системы - формулой (2.11): Виртуальноеперемещение k-й точки
Уравнения Лагранжа второго рода формулируются следующим образом:
где T – кинетическаяэнергия механической системы; число уравнений Лагранжа II рода равно i = s числу степеней свободы системы; т.е. полная производная по времени d/dt от частной производной от кинетической энергии системы по обобщенной скорости В уравнения Лагранжа не входят заранее неизвестные реакции идеальных связей. Если силы, действующие на систему, потенциальные, то обобщенные силы находятся по формуле (2.18), а уравнения Лагранжа второго рода в этом случае преобразуются к виду
Функция, равная разности кинетической и потенциальных энергий механической системы, называется функцией Лагранжа L = T – П. Так как потенциальная энергия системы является функцией только обобщенных координат, то
При использовании функции Лагранжа уравнения(2.21) принимают вид
Кинетическая энергия механической системы, состоящей из n материальных точек, как известно, определяется по формуле
Принимая во внимание выражение (2.19), кинетическую энергию системы можно записать в виде
где
Если наложенные на систему связи стационарные, то
Производные от кинетической энергии (2.25) по обобщенной скорости
Так как
Подставляя эти выражения в уравнение Лагранжа (2.20), получаем
Так как обобщенные силы - функции обобщенных координат, времени и, возможно, обобщенных скоростей, то каждое из уравнений (2.26) имеет второй порядок. Порядок уравнений не изменится и при нестационарных связях, так как в этом случае в выражения (2.26) войдут слагаемые, зависящие только от обобщенных координат, обобщенных скоростей и времени. Таким образом, уравнения Лагранжа второго рода для механической системы с голономными связями представляют собой систему обыкновенных дифференциальных уравнений порядка 2n относительно обобщенных координат. Уравнения Лагранжа второго рода сыграли решающую роль в развитии динамики систем и широко используются для решения многих задач динамики многопараметрических систем. Следует отметить, что для понимания существа и особенностей метода Лагранжа недостаточно изучения одной теории, необходимо рассматривать много примеров и задач. Изучение уравнений Лагранжа должно быть предметным. 2.8. Последовательность действий при использовании
1.Определить число степеней свободы системы и выбрать наиболее удобные обобщенные координаты. 2. Вычислить кинетическую энергию системы в ее абсолютном движении и выразить эту энергию через обобщенные координаты Напомним формулы кинетических энергий в абсолютном движении: · для материальной точки · длясистемы материальных точек · длятвердого тела: – при поступательном движении – при вращении вокруг неподвижной оси l – при плоскопараллельном движении
– при вращении вокруг неподвижной точки – в общем случае движения твердого тела
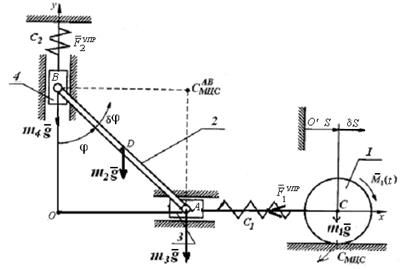
3. Вычислить производные от кинетической энергии, входящие в левую часть уравнений Лагранжа. 4. Определить обобщенные силы, соответствующие выбранным обобщенным координатам (так как каждой обобщенной координате соответствует обобщенная сила, то число обобщенных сил механической системы равно числу обобщенных координат, причем размерность каждой из обобщенных сил соответствует размерности соответствующей обобщенной координаты). 5. Подставить все вычисленные величины в уравнения Лагранжа. Пример 2.14.Механическая система (рис. 2.13) состоит из однородного круглого цилиндра 1 массой m1 и радиусом r, однородного стержня 2 длиной l и массой m2, к которому в точках А и В шарнирно прикреплены ползуны 3 и 4 массами m3и m4, а также двух пружин с коэффициентами жесткости С1 и С2. Цилиндр без скольжения катится по горизонтальной плоскости. К нему приложена пара сил с моментом М1(t). Пренебрегая сопротивлением качению цилиндра 1, трением в шарнирах и направляющих, а также массой пружин, составить дифференциальные уравнения движения системы.
Рис. 2.13
Решение.Система имеет две степени свободы. В качестве обобщенных координат выберем перемещение q1= s центра масс С цилиндра 1 и угол q2 = jповорота стержня 2 (против хода часовой стрелки). Полагаем, что при s = 0 иj = 0 пружины не деформированы. Уравнения Лагранжа второго рода для данной системы имеют вид
Кинетическая энергия системы складывается из кинетических энергий: цилиндра 1 и стержня 2, совершающих плоское движение; ползунов 3 и 4, совершающих поступательное движение: Кинетическая энергия цилиндра 1 Кинетическая энергия стержня 2 венный центр скоростей (МЦС) стержня 2. Принимая во внимание, что Ползуны движутся поступательно и, следовательно,
Таким образом, кинетическая энергия системы, выраженная через обобщенные координаты и обобщенные скорости, равна
Вычисляем производные от кинетической энергии системы: – по q1= s – по q2 = j
Для нахождения обобщенных сил
Эта формула позволяет вычислять обобщенные силы последовательно, учитывая, что обобщенные координаты, а значит, и их вариации не зависят друг от друга. Поэтому системе можно сообщить такое виртуальное перемещение, при котором изменяется только одна обобщенная координата, а другие при этом не варьируются. 1. При
где
2. При
где
Выражение в квадратных скобках в уравнении виртуальной работы (2.30) перед вариацией
Подставляя значения производных от кинетической энергии и выражения для обобщенных сил (2.29) и (2.31) в (2.27), получаем дифференциальные уравнения движения системы: по q1= sÞ по q2 = jÞ
Поиск по сайту: |
 .
. , ее скорость
, ее скорость . (2.19)
. (2.19) , (2.20)
, (2.20) минус частная производная от кинетической энергии системы по обобщенной координате
минус частная производная от кинетической энергии системы по обобщенной координате  равна обобщенной силе
равна обобщенной силе  , соответствующей обобщенной координате
, соответствующей обобщенной координате  .
. (2.21)
(2.21)
 (2.22)
(2.22) . (2.23)
. (2.23)
 =
=  (2.24)
(2.24)
 , и тогда Bi = 0, C = 0. В этом случае кинетическая энергия системы является однородной квадратичной формой обобщенных скоростей:
, и тогда Bi = 0, C = 0. В этом случае кинетическая энергия системы является однородной квадратичной формой обобщенных скоростей: (2.25)
(2.25) и времени, соответствующие левой части уравнений Лагранжа второго рода (2.20), равны
и времени, соответствующие левой части уравнений Лагранжа второго рода (2.20), равны
 то
то
 (2.26)
(2.26) и обобщенные скорости
и обобщенные скорости  .
. ;
; ;
; ;
; ;
; ;
; .
.
 . (2.27)
. (2.27) . Так как
. Так как  .
. . Ско-рость центра масс стержня
. Ско-рость центра масс стержня  , где
, где  – мгно-
– мгно- получаем
получаем  .
. ;
; .
. .
.
 ;
; ;
; .
. и
и  , соответствующих обобщенным координатам, воспользуемся выражением виртуальной работы сил (2.15):
, соответствующих обобщенным координатам, воспользуемся выражением виртуальной работы сил (2.15): . (2.15а)
. (2.15а)
 ,
, , (2.28)
, (2.28) , а выражение в квадратных скобках в (2.28) перед вариацией
, а выражение в квадратных скобках в (2.28) перед вариацией  есть обобщенная сила
есть обобщенная сила . (2.29)
. (2.29)
 ,
, (2.30)
(2.30)


 есть обобщенная сила
есть обобщенная сила .(2.31)
.(2.31) ;
;
 .
.