|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Анализ статической устойчивости системы электропривода
Условие устойчивости системы электропривода
Для анализа устойчивости системы электропривода изобразим точку пересечения механических характеристик насоса и электродвигателя (рисунок 5.3), на рисунке 5.2 это кривые 5 и 4 соответственно.
Рисунок 5.3 – График для анализа статической устойчивости
Момент механических потерь в электродвигателе
Проверим условия устойчивости системы электропривода При изменении момента сопротивления
Проверяем условие устойчивости
Условия выполняется. При изменении момента сопротивления
Проверяем условие устойчивости
Условие выполняется. Оба условия статической устойчивости выполняются.
РАСЧЕТ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК СИСТЕМЫ ЭЛЕКТРОПРИВОДА Расчет параметров передаточных функций звеньев Система регулирования скорости в динамических режимах была разработана в пункте 4.2. Рассмотрим ее более подробно и рассчитаем отдельные звенья данной системы. Модуль жесткости статической механической характеристики
Электромеханическая постоянная времени
Суммарный момент определяем по формуле
где
Подставляя числовые значения в формулы (6.1) – (6.4) получим Тэ = 0,095 с; βе = 231, 56 JΣ = 5,49 кг м2. Расчет системы автоматического регулирования скорости
Для расчета регулятора скорости используется метод последовательной коррекции при настройке на технический оптимум
где Wразс – передаточная функция разомкнутого контура регулирования скорости, Wорс – передаточная функция объекта регулирования скорости. В соответствии со структурной схемой (рисунок 4.3) передаточная функция объекта регулирования скорости имеет вид
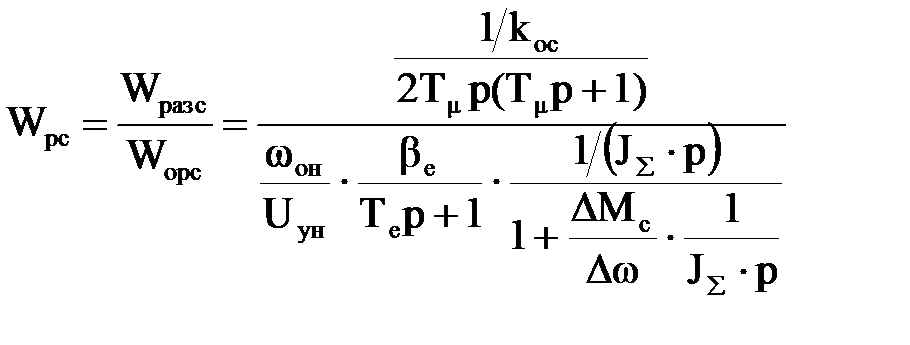
Настройка контура регулирования скорости производится на симметричный оптимум. Передаточная функция разомкнутого контура регулирования скорости имеет вид
где В соответствии с методом последовательной коррекции передаточная функция регулятора скорости примет вид
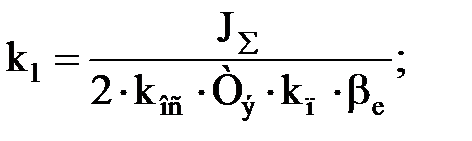
После преобразований получим
Параметры настройки регулятора
Таблица 6.2 – Результаты расчета
Поиск по сайту: |
 (5.19)
(5.19)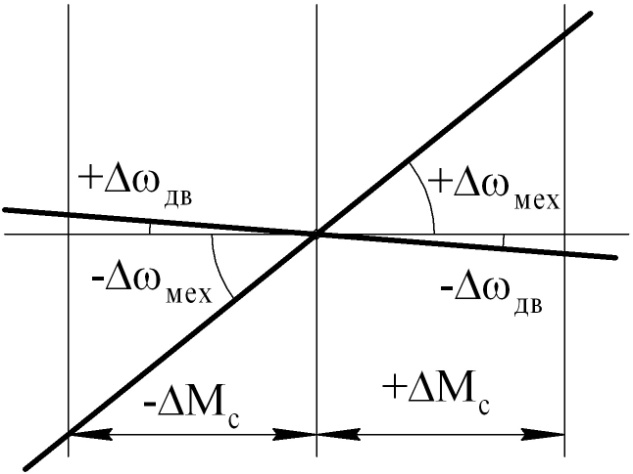
 (5.20)
(5.20) , получаем изменение скорости вращения для двигателя и насоса соответственно
, получаем изменение скорости вращения для двигателя и насоса соответственно
 .
. ;
; .
. получаем изменение скорости вращения для двигателя и насоса соответственно
получаем изменение скорости вращения для двигателя и насоса соответственно
 .
. ;
; .
. (6.1)
(6.1) (6.2)
(6.2) (6.3)
(6.3) – момент инерции центробежного вентилятора, определяемый по формуле
– момент инерции центробежного вентилятора, определяемый по формуле (6.4)
(6.4) ;
; , (6.5)
, (6.5) , (6.6)
, (6.6)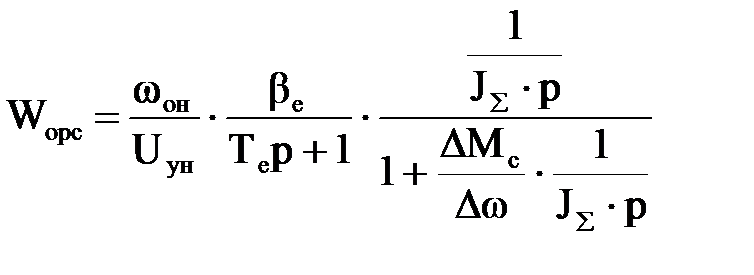 .
. , (6.7)
, (6.7) .
. . (6.8)
. (6.8) . (6.9)
. (6.9)







 мА·с/рад
мА·с/рад

