|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Классификация объектов тепловой энергетики по параметру регулирования и их математическое описаниеСтр 1 из 2Следующая ⇒
Задачи статического и динамического анализа САУ. Анализ работы системы автоматического регулирования и анализ работы ее элементов выполняется для двух возможных состояний: статического и динамического. Уравнение статики элемента устанавливает зависимость выходной координаты от входных координат, представляющих собой внешние по отношению к элементу возмущения. Уравнение статики позволяет определить связь между выходной координатой и конкретным внешним возмущением при различных равновесных режимах работы. При статическом анализе системы автоматического регулирования изучают условия обеспечения равновесных (установившихся) состояний, а также выявляют статическую характеристику. Такой анализ позволяет оценить статическую ошибку в поддержании заданного значения регулируемого параметра (степень неравномерности). Выполнение условий работы системы по заданной степени неравномерности и выбору диапазона регулируемых режимов проверяется статическим расчетом. При известном регулируемом объекте статический расчет сопровождается определением параметров элементов автоматического регулятора, которые определяют его конструктивные показатели, обеспечивающие заданную неравномерность и диапазон работы. Динамический анализ системы автоматического регулирования связан с исследованием ее поведения при нарушении равновесного режима. Предметом исследования в этом случае является процесс изменения регулируемого параметра во времени — так называемый переходный процессcp = cp (t); X = X (t) или т) = ц (t). Нарушение равновесного режима может сопровождаться возвращением системы в исходное состояние, переходом ее в новое равновесное состояние, характеризуемое новым значением регулируемого параметра (в статических системах), или непрерывным удалением от первоначального состояния. В первом и втором случаях система является устойчивой, в третьем — неустойчивой. Поэтому первой задачей динамического анализа работы систем автоматическо го регулирования является оценка системы с точки зрения устойчивости. Вторая задача динамического анализа связана с выявлением качественных показателей переходного процесса (время переходного процесса, максимальное отклонение регулируемой величины от заданного значения, колебательность процесса и т. п.). Третьей задачей анализа является определение влияния параметров элементов, образующих систему автоматического регулирования, на устойчивость и на качественные показатели переходного процесса.
Уравнения движения элементов системы автоматического регулирования, базирующиеся на основе тех же зависимостей (4)—(6), являются линейными дифференциальными уравнениями. Линеаризация связей в элементах системы, обеспечивающая получение линейных дифференциальных уравнений собственно системы, — это основной метод, упрощающий в допустимых пределах решение задач устойчивости и качества переходных процессов. Нахождение дифференциальных уравнений элементов является основой для получения дифференциального уравнения системы автоматического регулирования. Решение дифференциального уравнения системы регулирования позволяет найти изменение регулируемой величины во времени, т. е. переходный процесс. Знание переходного процесса дает наиболее полное представление о работе системы автоматического регулирования. Дифференциальные уравнения движения элементов и систем автоматического регулирования записываются в форме, при которой левая часть уравнения содержит выходную величину и ее производные, а правая часть — соответствующие входные возмущения.
Классификация объектов тепловой энергетики по параметру регулирования и их математическое описание. Если в основу классификации положить параметр регулирования, то объекты регулирования тепловой энергетики можно подразделить на несколько групп, каждая из которых, в качестве регулируемого параметра соответственно имеет угловуюскорость вращения ротора, давление газа или пара в ресивере, уровень жидкости в резервуаре, температуру в камере и т.д. Каждая из этих групп регулируемых объектов описывается однотипными уравнениями движения. Первая группа.Равновесный режим работы объектов, отнесенных к данной группе, обеспечивается равенством крутящего момента Мд0, вырабатываемого машиной на равновесном режиме моменту Мс0 потребителя (сопротивления) на этом же режиме! Уравнение равновесного состояния (уравнение статики) таких объектов имеет вид Мд0 = Мс0.(34) Нарушение равновесного состояния, например в связи с изменением нагрузки, приводит к появлению разницы в значениях крутящих моментов машины и потребителя. Отклонение объекта от равновесного состояния вследствие изменения указанных моментов отражается в уравнении динамики объекта. Разница моментов расходуется на ускоренное или замедленное вращение ротора, поэтому
где J — приведенный момент инерции ротора объекта, принимаемый постоянным; (£> — угловая скорость (выходная координата объекта); Мд и Мс — измененные значения моментов двигателя и потребителя. Вторая группа.Объекты, относящиеся ко второй группе, представляют собой ресивер определенного объема с коммуникациями подвода и отвода газа. Уравнение статики таких объектов получает вид
Четвертая группа. Регулируемым объектом этой группы может быть камера, в которой необходимо поддерживать заданное значение температуры. Условие равновесного состояния объекта (уравнение статики) — равенство (на равновесном режиме) подводимого
Если равновесное состояние нарушено, то уравнение динамики позволяет определить количество тепла, аккумулируемое в данной камере: где ск — теплоемкость камеры в ккал/град.
Приведенные выше уравнения динамики регулируемых объектов однотипны и легко подчиняются обобщенной энергетической форме:
где В — постоянная объекта; у — регулируемый параметр; Ег и E2 — подводимая и отводимая энергии.
4. Общий вид экспериментальных переходных кривых теплоэнергетических процессов.
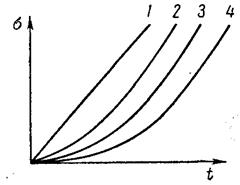
Особенностью реального управления многими инерционными технологическими процессами, такими как процесс регулирования давления, расхода, уровня, температуры, является апериодичность переходных характеристик. Увеличение количества емкостей, составляющих регулируемый объект, приводит, очевидно, к соответствующему увеличению порядка дифференциального уравнения, описывающего процесс разгона для регулируемой величины в последней из емкостей при возмущении на входе в объект Переходный процесс многоемкостного теплового регулируемого объекта за редким исключением описывается дифференциальными уравнениями, характеристические уравнения которых имеют лишь действительные корни. Поэтому процессы разгона в них протекают апериодически, а их кривые разгона являются суммами экспонент (рис. III. 8, кривые 2, 3, 4) и имеют характерную «S-образную» форму. Чем больше составляющих емкостей имеет регулируемый объект при прочих равных условиях, тем более полого идет кривая разгона в начале процесса и тем длительнее его течение (кривые 3 и 4 рис. III. 8). При отсутствии самовыравнивания в регулируемом объекте форма кривых разгона будет несколько иной (рис./III. 9). В этом случае любая из кривых будет уходить в бесконечность, становясь, при достаточном удалении от начала процесса, прямолинейной.
Рис. III. 8. Характеристики разгона многоемкостных объектов при наличии самовыравнивания. Цифры на рисунке соответствуют числу емкостей объекта
Рис. III. 9. Характеристики разгона многоемкостных объектов в отсутствии самовыравнивания. Цифры на рисунке соответствуют числу емкостей объекта
Поиск по сайту: |


 и отводимого
и отводимого  тепла
тепла

 — аккумулируемая в данном объекте энергия;
— аккумулируемая в данном объекте энергия;