|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Основна задача динамiки вiдносного руху матерiальної точки ⇐ ПредыдущаяСтр 3 из 3
Рух матерiальної точки по вiдношенню до iнерцiальної системи вiдлiку, тобто такої системи, для якої справедливi основнi закони динамiки Ньютона, називається абсолютним. Розглянемо рух матеріальної точки маси m по відношенню до неінерціальної системи відліку Оxyz, тобто до системи, яка рухається з прискоренням відносно інерціальної системи відліку О1x1y1z1 (рис. 6.1). Рух точки М вiдносно неiнерцiальної системи вiдлiку називається вiдносним.
Для розв’язання цiєї задачi треба спочатку скласти диференцiальне рiвняння вiдносного руху точки М, а потiм, проiнтегрувавши це рiвняння, знайти закон вiдносного руху точки. За другим законом Ньютона для руху точки вiдносно iнерцiальної системи вiдлiку m де Абсолютне прискорення точки за теоремою Корiолiса : де aвід, aпер, aкор - вiдносне, переносне i корiолiсове (поворотне) прискорення точки М вiдповiдно. Пiдставимо в рiвняння (6.1) значення прискорення m Сила, рiвна добутку маси рухомої точки та її переносного прискорення i направлена протилежнo до цього прискорення, називається переносною силою iнерцiї
Сила, рiвна добутку маси рухомої матерiальної точки та її корiолiсового прискорення i направлена протилежно до цього прискорення, називається корiолiсовою або поворотною силою iнерцiї
Рiвняння (6.3) можна переписати так: m Це рiвняння є основним законом динамiки у векторнiй формi для вiдносного руху невiльної матерiальної точки. В загальному випадку
де Порiвнюючи рiвняння (6.6) i (6.1), приходимо до такого висновку: основне рiвняння динамiки вiдносного руху матерiальної точки можна скласти так, як i основне рiвняння динамiки абсолютного руху точки (6.1), якщо тiльки до дiючих на точку сил В проекцiях на осi системи вiдлiку Oxyz маємо
Аналогiчно можна одержати рiвняння вiдносного руху точки в проекцiях на осi натурального тригранника. Розглянемо вiдносний спокiй тiла поблизу Землi. На пiдвiшений до нитки тягар дiють двi сили: сила притягання тiла Землею
У даному разi доцентрова сила mω2r є геометричною сумою сил Лiнiя, вздовж якої розмiщується висок (нитка з тягарем), називається вертикаллю. Вертикаль утворює з площиною екватора кут θ, який називається географiчною широтою того мiсця, де пiдвiшений тягар. Основне рiвняння вiдносного спокою одержимо з рiвняння (6.6), якщо в ньому прийняти vвід = 0; aвід = 0; що дає З рівняння (6.10) бачимо, що вiдносний рух iснує тодi, коли прикладенi сили Отже, у випадку вiдносного спокою матерiальної точки геометрична сума трьох сил - активної
Вага тіла Формула сили ваги: Вага тiла, згiдно з її означенням, дорiвнює:
На полюсi доцентрова сила дорiвнює нулю i сила ваги дорiвнює силi притягання Значить
де позначено Абсолютне прискорення γ(mM/R32)·( де
Значить g2 = (g0 - Оскiльки
Нехтуючи пiд радикалом останнiм доданком, що має множником ω4, i добуваючи наближено квадратний корiнь, матимемо: g = g0 -ω2R3cos2φ. (6.16) Для полюса φ = π/2, g0 = 983см/с2; ω2R3≈3см/с2, а тому формулу (6.16) можна записати так: g = (983 -3cos2φ) см/с2. Однак справжнi вимiрювання показують, що g = (983 -5,2cоs2φ) см/с2. На практицi користуються середнiм значенням g = 981 см/с2. У зв’язку з впровадженням мiжнародної системи одиниць СI введено так зване нормальне значення g, яке позначають gн; за означенням приймають gн= 9,80665 м/с2.
Поиск по сайту: |
 Основна задача динамiки вiдносного руху матерiальної точки формулюється так. Нехай система вiдлiку Oxyz рухається вiдносно нерухомої системи O1x1y1z1 за вiдомим законом, тобто для будь-якого моменту часу нам вiдомi прискорення апер = аО точки O, а також переносна кутова швидкiсть ωпер i переносне кутове прискорення εпер системи вiдлiку Oxyz вiдносно системи вiдлiку O1x1y1z1. Знаючи сили, якi дiють на точку М, а також початковi умови руху точки М i системи вiдлiку Oxyz, потрiбно знайти закон вiдносного руху точки М.
Основна задача динамiки вiдносного руху матерiальної точки формулюється так. Нехай система вiдлiку Oxyz рухається вiдносно нерухомої системи O1x1y1z1 за вiдомим законом, тобто для будь-якого моменту часу нам вiдомi прискорення апер = аО точки O, а також переносна кутова швидкiсть ωпер i переносне кутове прискорення εпер системи вiдлiку Oxyz вiдносно системи вiдлiку O1x1y1z1. Знаючи сили, якi дiють на точку М, а також початковi умови руху точки М i системи вiдлiку Oxyz, потрiбно знайти закон вiдносного руху точки М. =
=  +
+  , (6.1)
, (6.1) , (6.2)
, (6.2) з (6.2) i одержимо
з (6.2) i одержимо =
=  )+(- m
)+(- m  ). (6.3)
). (6.3) :
: :
: +
+  ´(
´(  )+
)+  ´
´  ), (6.8)
), (6.8) =
=  ,
,  =
=  ,
,  =
=  ;
;
 (6.9)
(6.9) .
. . Сила
. Сила 
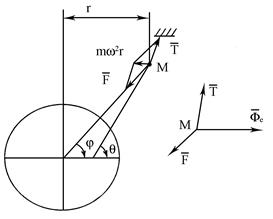 Завдяки добовому обертанню Землi пiдвiшений до нитки тягар перебуває у рiвномiрному русi по колу радiусу r = Rзcosφ i, отже, на тягар дiє доцентрова сила mω2r, яка направлена до центра С кола добового обертання.
Завдяки добовому обертанню Землi пiдвiшений до нитки тягар перебуває у рiвномiрному русi по колу радiусу r = Rзcosφ i, отже, на тягар дiє доцентрова сила mω2r, яка направлена до центра С кола добового обертання. = - m·2(
= - m·2(  = m
= m  . Вагу тiла можна вимiрювати на пружинних терезах. Це вимiрювання визначає, однак, не силу притягання тiла до Землi, а лише ту частину
. Вагу тiла можна вимiрювати на пружинних терезах. Це вимiрювання визначає, однак, не силу притягання тiла до Землi, а лише ту частину  . (6.11)
. (6.11) , де
, де  , (6. 12)
, (6. 12) , (6.14)
, (6.14)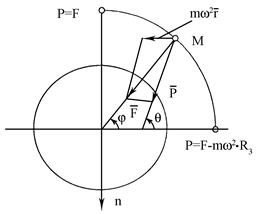
 )2 = g02 - 2 g0
)2 = g02 - 2 g0  .
.