|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Схема автоматических неуравновешенных мостов ⇐ ПредыдущаяСтр 2 из 2
В диагональ моста 1-1 включён звуковой генератор 2, питающий мост. В выходную диагональ 3-3 включён полупроводниковый прерыватель 4, питаемый через трансформатор 5 от сети переменного тока. При равновесии моста периодические прерывания (запирания) выходной диагонали не изменяют входного сопротивления моста. При нарушении равновесия моста периодические запирания и открывания выходной диагонали обуславливают изменение входного сопротивления моста, а, следовательно, и изменение тока по амплитуде в диагонали 1-1. Глубина модуляции входного тока моста, являющаяся показателем степени неравновесия моста, однозначно определяется измеряемой величиной и не зависит от уровня питающего напряжения. Для изменения глубины модуляции входного тока нулевым способом, а также и степени неравновесия моста, напряжение, пропорциональное модулированному току, с трансформатора 6 подаётся на реохорд 7 электронной следящей системы, движок которого заземлён. Падение напряжения на реохорде подаётся на сетки лампы 8. На аноды лампы 8 от трансформатора 9 подаётся управляющее напряжение с частотой коммутации выходной диагонали моста 50 Гц. Триоды лампы 8 поочерёдно открываются, и на катодном выходе лампы появляется напряжение с одной или другой части реохорда, т.е. результирующее напряжение на катоде будет также модулировано по амплитуде. Для автоматического уравновешения неуравновешенного моста входное напряжение электронного переключателя 8 подаётся на детектор 10, который выделяет низкочастотное модулирующее напряжение. Это напряжение проходит через фильтр нижних частот 11, усиливается усилителем 12 и подаётся на управляющую обмотку двухфазного реверсивного двигателя 13. Вал двигателя через редуктор связан с движком реохорда 7.
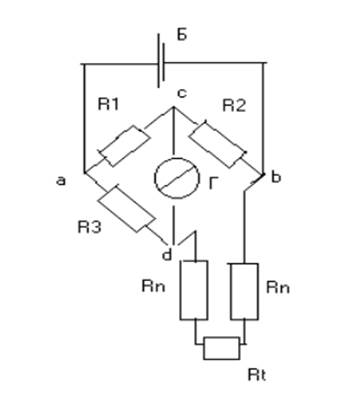
Двухпроводная схема подключения термометра Сопротивления к измерительному мосту
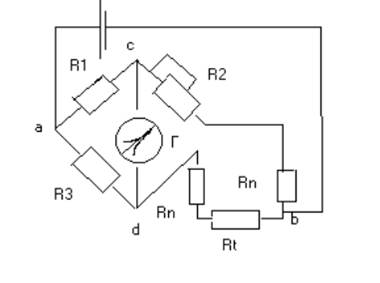
Трехпроводная схема подключения термометра Сопротивления к измерительному мосту
Достоинства автоматических неуравновешенных мостов 1. Возможность производить измерение мощности методом непосредственного отсчёта
Недостатки автоматических неуравновешенных мостов 1. Влияние напряжения питания моста на точность 2. Влияние внешней среды на показания Маркировки 1. Автоматический уравновешенный мост КСМ-4 2. Автоматический уравновешенный мост КСМ-2 3. Автоматический уравновешенный мост КСМ 4. Автоматический уравновешенный мост КСМ-3 5. Высоковольтный мост переменного тока СА7 100-2 6. Высоковольтный мост переменного тока СА7 100-3 7. Автоматический неуравновешенный мост КМП-1 8. Автоматический неуравновешенный мост КМП-3 МГ
Поиск по сайту: |