|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Класифікація елементів автоматики, їх загальні характеристикиСтр 1 из 3Следующая ⇒
Тема 1.1 Датчики в системах автоматики
Усі пристрої автоматики, телемеханіки й обчислювальної техніки складаються з окремих елементів. Елемент – це конструктивно відособлена частина схеми або системи, що виконує визначену функцію. Елементом може бути резистор, конденсатор, трансформатор, муфта і ін. У загальному вигляді елемент (рис.1.1) являє собою перетворювач, на вхід якого подається сигнал х , а на виході утворюється сигнал у. Елементи (Е) можуть бути пасивними й активними. У пасивних елементах (рис.1.1, а) відсутнє допоміжне джерело енергії ДДЕ, у них сигнал у утворюється за рахунок сигналу х , а в активних елементах є ДДЕ (рис.1.1, б). У цих елементах вхідний розмір тільки керує передачею енергії від ДДЕ вихідному розміру.
а) б) а – пасивний елемент; б – активний елемент Рис. 1.1 - Умовне позначення елемента автоматики, телемеханіки й обчислювальної техніки.
Розміри х і у можуть бути як електричними (струм, напруга, опір), так і неелектричними (тиск, швидкість, температура, переміщення і т. і.). Елементи можуть відрізнятися друг від друга фізичною природою, принципом дії, схемою ввімкнення, конструкцією і ін. За виконуючими функціями всі елементи можна розділити на датчики, підсилювачі, стабілізатори, реле, контактори, розподільники, магнітні пускачі, двигуни, муфти і т. д. Автоматичні пристрої в різних сполученнях застосовуються при автоматизації керування, контролю вимірянь і регулювання (підтримки сталості визначених параметрів робочих органів машини). Кожний елемент автоматики, телемеханіки й обчислювальної техніки являє собою перетворювач з наступними характеристиками: 1. Залежність вихідного сигналу у від вхідного х: y = f (x) 2. Коефіцієнт перетворення. Розрізняють три коефіцієнта перетворення: статичний, динамічний і відносний. Статичний коефіцієнт перетворення (коефіцієнт передачі) Кст – відношення вихідного сигналу елемента у до вхідного сигналу х: Кст = у / х Якщо вихідний і вхідний сигнал мають однакові фізичні велечини, тоді статичний коефіцієнт перетворення визначається у відносних одиницях (напр., коефіцієнт підсилення в підсилювачах). Динамічний коефіцієнт перетворення Кдин: Кдин = ∆у / ∆х Коефіцієнти Кст і Кдин будуть рівні, якщо вихідний сигнал у змінюється пропорційно вхідному сигналу х. Відносний коефіцієнт перетворення Квідн: Квідн = (∆у/ у) / (∆х/х) = (∆у/∆х) / (у /х) = Кдин / Кст Тобто відносний коефіцієнт перетворення – це відношення динамічного коефіцієнта перетворення до статичного коефіцієнта перетворення. Розглянуті коефіцієнти перетворення можуть застосовуватися до будь-якого елемента незалежно від виконуємих їм функцій. Наприклад, для датчиків коефіцієнт перетворення називається чутливістю, а для підсилювачів даний коефіцієнт називається коефіцієнтом підсилення. Як правило, до датчиків пред'являється вимога забезпечення максимальної чутливості, а від підсилювачів потрібно одержання максимального коефіцієнта підсилення. Протилежна вимога пред'являється до стабілізаторів. Вони повинні мати мінімальну чутливість. 3. Межа чутливості - величина найменшої зміни вхідної величини, що викликає зміну вихідного сигналу. Границя чутливості Ох1 або Ох2 (рис.1.2) може виникати в елементах за різних причин. У зоні нечутливості D х вихідний сигнал залишається постійним і дорівнює нулю. У реле, електромагнітах, тахогенераторах, двигунах межа чутливості виникає в результаті тертя, неробочого ходу або гістерезіса. 4. Похибка – це зміна вихідного сигналу, що виникає у результаті зміни внутрішніх властивостей елемента або зміни зовнішніх умов його роботи. Розрізняють наступні види похибок: абсолютну, відносну і приведену. Абсолютною похибкою ∆у називається різниця між фактичним значенням вихідного сигналу у і його розрахунковим значенням уд : у– уд = ∆ у Відносною похибкою e називають відношення абсолютної похибки Dу до розрахункового значення вихідного сигналу у: e = ∆у/ уд Відносну похибку можна виразити у відсотках: e =( ∆у/ уд) ∙ 100% Приведеною відносною похибкою x називають відношення абсолютної похибки Dу до максимального значення вихідного сигналу умакс, що визначає діапазон його зміни: x = Dу / умакс Приведена відносна похибка так само, як і відносна похибка, може виражатися у відсотках. x = (Dу / умакс ) ∙100% Якщо виміри здійснюються за допомогою приладу , що показує, максимальне значення вихідного сигналу умакс приймається верхній діапазон шкали цього приладу.
Рис 1.2 - Характеристика елемента, який має межі чутливості 0х1и 0х2 и зону нечутливості Dх
Запитання для самоперевірки
1 Що уявляє собою елемент автоматики, телемеханіки й обчислювальної техніки? 2 Як класифікують елементи автоматики? 3 Надайте основні характеристики елементів автоматики Зворотні зв'язки
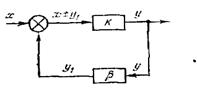
Зворотний зв'язок утвориться в тому випадку, коли частина вихідного сигналу елемента подається на його вхід. На рис 1.3 показаний основний елемент, який охоплений зворотним зв'язком. Основний елемент має коефіцієнт перетворення К. Зворотний зв'язок у схемі здійснений за допомогою додаткового елемента зворотного зв'язку, що має коефіцієнт перетворення b. На вхід елемента подається сигнал х, а на виході елемента утворюється сигнал у. Частина вихідного сигналу у1 подається на вхід елемента. Якщо сигнал у1 збігається по фазі з вхідним сигналом х, то утворюється позитивний зворотний зв'язок, при цьому на вхід основного елемента надходить сигнал х + у1. Якщо сигнал у1 не збігається по фазі з вхідним сигналом х, то утворюється негативний зворотний зв'язок і на вхід основного елемента надходить сигнал х - у1.
Рис 1.3 - Елемент, охоплений зворотним зв'язком
Зворотний зв'язок змінює коефіцієнт перетворення К. Визначимо коефіцієнт перетворення основного елемента, охопленого позитивним зворотним зв'язком. Кп.з.з = у / х Коефіцієнт перетворення основного елемента, не охопленого зворотним зв'язком, можна визначити за формулою: Кп.з.з = у / (х + у1) Коефіцієнт перетворення додаткового елемента, що створює зворотний зв'язок, можна визначити за формулою: b = у1 / у Формула коефіцієнта перетворення основного елемента, охопленого позитивним зворотним зв'язком, буде мати наступний вигляд: Кп.н.з = К / (1 + b · К) Формула коефіцієнта перетворення основного елемента, охопленого негативним зворотним зв'язком, буде мати наступний вигляд: Кп.н.з = К / (1 - b · К) Об'єднану формулу можна записати в такому вигляді: Кп.н.з = К / (1 ± b · К) , де знак “+” відноситься до негативного зворотного зв'язку, а знак “-” - до позитивного. Позитивний зворотний зв'язок збільшує коефіцієнт перетворення, але зменшує стабільність роботи елемента. Негативний зворотний зв'язок зменшує коефіцієнт перетворення, але збільшує стабільність роботи елемента.
Запитання для самоперевірки
1. Коли і за допомогою чого буде утворюватися зворотний зв'язок? 2. Як зворотний зв'язок впливає на коефіцієнт перетворення і на стабільність роботи елемента? 1.1.3 Основні відомості про датчики і їх загальні характеристики
Датчик (первинний перетворювач інформації) - це пристрій, що перетворює контрольований або регульований розмір у такий вид сигналу, що більш зручний для впливу на наступні елементи автоматики, телемеханіки й обчислювальної техніки. У загальному вигляді датчик Д (рис. 1.4) можна представити як чутливий елемент ЧЕ і перетворювач Пр. Чутливий елемент у системах автоматики і телемеханіки виконує функції “органів почуттів”. Він призначений для перетворення контрольованого розміру х у такий вид сигналу х1, що зручний для виміру.
Рис. 1.4 - Структура датчика
Вхідна величина - це найчастіше неелектрична контрольована величина (лінійне переміщення частини верстата, температура, сила, розмір деталі, швидкість і т.п.). Вихідний сигнал - перетворена вхідна величина, що передається на виконавчу чи проміжну ланку. Вихідні сигнали бувають електричні, гідравлічні, пневматичні, механічні, радіоактивні й ін. Наприклад, тиск х в електроконтактному манометрі спочатку перетвориться за допомогою чутливого елемента в механічне переміщення стрілки х1, а потім вже в перетворювачі—в зміну опору у. Датчики, що випускаються промисловістю, мають малі габарити, масу, інерційність (тобто час на перетворення вхідної величини у вихідний сигнал), мають різні діапазони вимірювальних величин. Загальними характеристиками датчиків є: статична характеристика; інерційність; динамічна (диференціальна) чутливість, межа чутливості; похибка; потужність; момент або зусилля, вимагаємі від джерела вхідного сигналу; вихідна потужність і вихідний опір датчика. Розглянемо деякі з загальних характеристик датчиків. Статична характеристика показує залежність вихідного розміру у від вхідного розміру х, де х - контрольований або регульований параметр, що діє на датчик, у - параметр, отриманий після перетворення. Інерційність характеризується відставанням зміни вихідного розміру у від зміни вхідного розміру х. Вона приводить до похибок при вимірюванні вхідного розміру х і тому є небажаною. Динамічна (диференціальна) чутливість датчика S або динамічний коефіцієнт перетворення датчика Кдин показує, у скільки разів збільшення вихідного розміру (Dу, dу) більше збільшення вхідного розміру (Dх, dх): S = Dу / Dх = dу / dх Бажано, щоб динамічна чутливість датчика S була як можна більш високою. Характеристики датчиків можуть визначатися як розрахунковим, так і експериментальним шляхом.
Запитання для самоперевірки
1 Яку роль відіграє датчик у системах автоматики і телемеханіки? 2 З яких елементів складається датчик і їх функції? 3 Які характеристики є загальними для датчиків?
Поиск по сайту: |