|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Основные параметры элементов автоматики
Вес элементы автоматики представляют собой преобразователи энергии, на вход которых подается величина х, а с выхода снимается величина у. Для каждого элемента автоматики в установившемся режиме существует определенная зависимость y = f(x) между входным сигналом х и выходным у, называемая статической характеристикой элемента (рис. 3.4).
Кроме того, элементам автоматики независимо от их назначения присущи общие параметры: передаточный коэффициент (чувствительность, коэффициент усиления, коэффициент стабилизации), погрешность, порог чувствительности, характеристики в статическом и динамическом режимах. Передаточный коэффициент элемента представляет собой отношение выходной величины у к входной х или отношение приращения Δу к приращению Δх. Передаточный коэффициент в первом случае называется статическим передаточным коэффициентом:
а во втором — динамическим:
При линейной статической, характеристике элемента автоматики эти коэффициенты постоянны и равны между собой при всех значениях х и у. Численное значение их при одинаковых масштабах по осям х и у равняется тангенсу угла наклона характеристики: В некоторых случаях, когда более удобно иметь безразмерный передаточный коэффициент, используют относительный передаточный коэффициент.
Знак передаточного коэффициента может быть положительным или отрицательным в зависимости от вида характеристики элемента. Статические характеристики элементов автоматики по виду можно разделить на три группы: линейная, у которой динамический коэффициент положителен для всех значений х; нелинейная непрерывная и нелинейная разрывная (рис. 3.5).
Для стабилизаторов принимается во внимание обычно относительный коэффициент стабилизации, который представляет собой отношение относительного изменения входной величины к относительному изменению выходной величины:
Как видно из выражений, коэффициент стабилизации есть обратная величина относительного передаточного коэффициента, то есть
Погрешностью называется отклонение выходной величины у от ее расчетного значения вследствие изменения внутренних свойств элемента (износ, старение) и внешних условий (изменение напряжения питания, температуры окружающей среды и т. п.). При оценке элементов автоматики, как и в измерительной технике, используют абсолютную и относительную погрешности. В зависимости от причин, вызывающих погрешности, различают температурные, конструктивные, погрешности от колебания напряжения и другие. В одних устройствах при небольшом изменении входной величины выходная остается неизменной. Это явление объясняется наличием в отдельных узлах элементов трения, свободного хода (люфта), гистерезиса и т.п. Количественная сторона этого явления оценивается величиной порога чувствительности, под которым понимают наименьшее значение входной величины, способное вызвать изменение выходной величины (рис. 3.6).
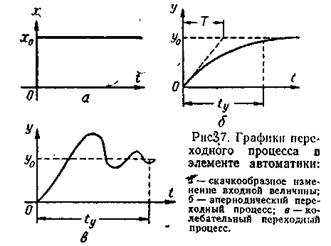
В других устройствах автоматики при постоянстве входной величины возникают самопроизвольные изменения выходной. Это объясняется внешними влияниями (изменение условий окружающей среды) и внутренними (например, старение элементов). Нестабильность выходной величины при постоянстве входной величины применительно к назначению элемента автоматики называют по-разному: помехи, шумы, плавание, дрейф и т. п. Выше рассматривались характеристики элементов автоматики при неизменных величинах х и у во времени, то есть в статическом режиме. Условия работы элемента автоматики, когда его входная величина х и выходная величина у являются не установившимися, а изменяются во времени, называют динамическим режимом. Поскольку элементы автоматики, как правило, обладают определенной инерционностью, то выходная величина изменяется с некоторым запаздыванием по отношению к изменению входной величины. Инерционные свойства элементов определяют работу систем автоматики в динамическом режиме и имеют решающее значение при анализе качественной и количественной сторон работы устройств автоматики. После скачкообразного изменения входной величины (рис. 3.7, а) выходная величина достигает своего установившегося значения не сразу, а через некоторое время, в течение которого в элементе происходит переходный процесс. Кaк известно, переходный процесс может быть затухающим апериодическим (рис. 3.7, б) или затухающим колебательным (рис. 3.7, в).
Разность между значениями выходной величины в динамическом и в новом установившемся режимах называется динамической погрешностью. Для практических целей желательно стремиться к тому, чтобы динамическая погрешность была минимальной.
Виды автоматизации В зависимости от функций, выполняемых специальными автоматическими устройствами, различают следующие основные виды автоматизации: автоматический контроль, автоматическая защита и автоматическое управление. Автоматический контроль включает в себя автоматические сигнализацию, измерение, сортировку и сбор информации. Автоматическая сигнализация предназначена для оповещения обслуживающего персонала о предельных или аварийных значениях каких-либо физических параметров, о месте и характере нарушений технологического процесса. Автоматическое измерение предназначено для измерения и передачи на специальные указательные или регистрирующие приборы физических величин, характеризующих технологический процесс или работу машин. Обслуживающий персонал по показаниям приборов судит о качестве технологического процесса или о режиме работы машин и агрегатов. Автоматическая сортировка предполагает контроль и разделение продукции по размеру, весу, твердости, вязкости и другим показателям (например, сортировка зерна, яиц, фруктов, картофеля и т. п.). Автоматический сбор информации предназначен для получения информации о ходе технологического процесса, о качестве и количестве выпускаемой продукции, для обработки и выдачи информации обслуживающему персоналу. Автоматическая защита представляет собой совокупность технических средств, которые при возникновении ненормальных и аварийных режимов либо прекращают контролируемый производственный процесс (например, отключают определенные участки электроустановки при возникновении на них коротких замыканий), либо автоматически устраняют ненормальные режимы. Автоматическая защита очень тесно связана с автоматическим управлением и сигнализацией. Она воздействует на органы управления и оповещает обслуживающий персонал об осуществленной операции. Защиту, выполняемую на реле, называют релейной защитой. Релейная защита широко применяется на электрических станциях, подстанциях, в сетях и различных электроустановках. Автоматическая защита включает в себя также автоблокировку. Устройства автоблокировки в основном предназначены для предотвращения неправильных включений и отключений оборудования и тем самым предупреждают повреждения и аварии.
Элементы автоматики Каждая из систем автоматики состоит из функциональных блоков и узлов, комплектуемых, в свою очередь, из отдельных элементов и приборов. Они характеризуются разнообразием принципов действия, конструктивным исполнением, степенью надежности, сроком службы и пр. Прежде чем перейти к рассмотрению конкретных устройств, применяемых для автоматизации мелиоративных систем, следует выделить основные функциональные узлы и элементы и выяснить их общие характеристики. По выполняемым функциям основные элементы автоматики обычно подразделяют на следующие виды: датчики, реле, усилители, стабилизаторы, распределители, генераторы импульсов и двигатели. Применяются также выпрямители, преобразователи, фазочувствительные схемы и целый ряд других устройств. Датчиками (измерительными элементами) называют элементы, служащие, как правило, для качественного преобразования входной (регулируемой, контролируемой или измеряемой) величины в другую величину, наиболее удобную для последующей передачи по цепи системы автоматики. В мелиоративных системах в большинстве случаев применяются датчики измерения неэлектрических величин: расхода воды, уровня, температуры, давления, влажности и т. п. Эти величины преобразуются в электрические, удобные для передачи на расстояние или для использования в местных электрических устройствах автоматики. Выходная величина датчика может представлять собой какой-нибудь параметр электрической цепи: сопротивление, индуктивность, емкость и др. В таких датчиках изменение параметров электрической цепи вызывает модуляцию величины и характера изменения тока или напряжения постороннего источника. Поэтому такие датчики называют параметрическими или датчиками-модуляторами. Если же входная величина датчика преобразуется в величину ЭДС (электродвижущей силы), то такой датчик называется генераторным. В применяемых нами устройствах автоматики контролируемая величина не всегда воздействует непосредственно на датчик. Обычно входная величина преобразуется в первичном измерителе в другую неэлектрическую величину (в большинстве случаев — в механическое перемещение), а затем уже в электрическую. Например, во всех первичных измерителях давления, температуры, уровня эти величины преобразуются в угловое или поступательное перемещение, которое, в свою очередь, преобразуется в изменение электрического параметра. Большинство современных датчиков имеют выходной сигнал в непрерывной (аналоговой) форме. Развитие цифровой техники обусловило применение датчиков дискретного действия, имеющих цифровые выгодные сигналы. Для этого первичные, измерители соединяются с преобразователями, которые превращают непрерывную величину (напряжения или угла поворота), пропорциональную измеренному параметру, в соответствующие числовые эквиваленты. Реле — наиболее распространенный элемент автоматики. Так называют элемент, в котором выходная величина у меняется скачкообразно — при достижении входной величиной х определенных значений. Характеристика релейного элемента приведена на рисунке 3.2, а. Изменение выходной величины скачком от у1 до у2 называется срабатыванием реле, а величина х2 — величиной срабатывания. Аналогично скачкообразное изменение величины у от у2 до у1 называется отпусканием реле, а величина х1 — величиной отпускания. Обычно х1 < x2, а отношение Реле часто используются для усиления мощности; мощность срабатывания обычно во много раз меньше мощности, управляемой при помощи реле. Кроме того, одно реле может осуществлять управление большим количеством элементов и цепей автоматики. В современной практике преимущественно применяются реле, основанные на электромеханическом принципе действия. Изменению входной электрической величины в них соответствует механическое перемещение якоря, что приводит к изменению положения контактов (рис. 3.8). Однако теперь все более широкое применение находят бесконтактные реле, обладающие по сравнению с электромеханическими рядом преимуществ.
а - характеристика реле; б – конструктивная схема электромагнитного реле.
Усилителями называют элементы, служащие для усиления входной величины. Необходимость в усилении обусловлена тем, что в ряде элементов энергия выходной величины недостаточна для управления последующим в цепи автоматики элементом. Усилители бывают как электрические, так и неэлектрические. Для автоматизации мелиоративных систем, наряду с электрическими и магнитными усилителями, применяются также гидравлические усилители, в частности использующие перепад уровней воды между каналами различных порядков. В общем, в основу процесса усиления положен ряд физических принципов, в соответствии, с чем различают гидравлические, электронные, магнитные, полупроводниковые, электромеханические и электромашинные усилители. Стабилизаторами называют элементы, в которых при изменении входной величины в определенных пределах выходная величина остается постоянной или изменяется незначительно. В системах автоматики часто необходимо стабилизировать напряжение или ток, в соответствии с чем различают стабилизаторы тока или напряжения. В общем виде схема электрического стабилизатора представлена на рисунке 3.9.
Рис 3.9. Схема электрического стабилизатора тока или напряжения.
Распределителем называют элемент автоматики, в котором происходит поочередное подключение одной цепи к ряду других. В системах автоматики необходимость поочередного подключения возникает при управлении многими элементами или при контроле многих элементов с помощью одного устройства. Существует большое количестве различных типов распределителей. Преимущественное применение нашли электромеханические шаговые распределители, распределители, собранные на электромагнитных реле, и бесконтактные быстродействующие распределители. Генераторы импульсов, как это следует из названия, предназначаются для генерирования импульсов различной формы и частоты — в зависимости от требований, предъявляемых к ним устройствами автоматики. Генераторы импульсов нашли особенно широкое применение в телемеханике. Различают релейно-контактные и различные бесконтактные генераторы импульсов, построенные с применением электронных и ионных приборов, транзисторов и т. д. Электродвигатели применяют в качестве исполнительных механизмов. Для привода подъемных механизмов затворов преимущественно используют асинхронные короткозамкнутые двигатели. На насосных станциях применяют асинхронные короткозамкнутые и синхронные низковольтные и высоковольтные двигатели. Используют также маломощные индукционные двухфазные конденсаторные двигатели и однофазные синхронные. Регулирование оборотов, как правило, не применяется.
Поиск по сайту: |

 ,
,
 и
и  . Размерность передаточного коэффициента определяется отношением размерностей входной и выходной величин. Например, для усилителя и стабилизатора он будет безразмерным, а для индуктивного датчика перемещения — размерным (в/см), поскольку размерность входной величины — см, а выходной — в.
. Размерность передаточного коэффициента определяется отношением размерностей входной и выходной величин. Например, для усилителя и стабилизатора он будет безразмерным, а для индуктивного датчика перемещения — размерным (в/см), поскольку размерность входной величины — см, а выходной — в.
 Применительно к датчикам и некоторым другим элементам статические и динамические передаточные коэффициенты называют статическими и динамическими коэффициентами чувствительности, а применительно к усилителям — коэффициентами усиления.
Применительно к датчикам и некоторым другим элементам статические и динамические передаточные коэффициенты называют статическими и динамическими коэффициентами чувствительности, а применительно к усилителям — коэффициентами усиления.
 .
.
 называется коэффициентом возврата реле. Как видно из характеристики, реле служат для получения дискретных фиксированных значений величин.
называется коэффициентом возврата реле. Как видно из характеристики, реле служат для получения дискретных фиксированных значений величин. Рис 3.8. Релейный элемент:
Рис 3.8. Релейный элемент: В стабилизаторе тока при постоянстве входного напряжения и1 и изменении сопротивления z величина l2 остается постоянной; в стабилизаторе напряжения при изменении и1 остается постоянным выходное напряжение и2.
В стабилизаторе тока при постоянстве входного напряжения и1 и изменении сопротивления z величина l2 остается постоянной; в стабилизаторе напряжения при изменении и1 остается постоянным выходное напряжение и2.