|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
По уровню оптимизации
АСУ существенно отличаются по уровню автоматизации. ИПС предназначены для записи и длительного хранения информации, которая считывается по запросу. Такая система может быть самостоятельной (библиотеки) или входить составной частью в АСУП. База данных является основой таких систем. В ней может быть отражена как структурированная (в виде таблиц), так и неструктурированная (текстовая) информация. В последнем случае это системы компьютеров офисов, учреждений, получившие широкие возможности благодаря электронной почте. ИСС вырабатывают для ЛПР соответствующие решения-советы в логической, числовой или символьной форме, при этом окончательное решение остается за человеком. В ИСС широко используют диалоговый режим.
8. Характерные признаки АСУ ТП
ГОСТ 34.003—90 дает такое понятие автоматизированной системы управления (АСУ): «АСУ — система «человек — машина», обеспечивающая эффективное функционирование объекта, в которой сбор и обработка информации, необходимой для реализации функций управления, осуществляются с применением средств автоматизации и вычислительной техники». Выделяют следующие виды автоматизированных систем: АСУТП — АСУ технологическими процессами; АСОУ — автоматизированные системы организационного управления; ИАСУ — интегрированные АСУ; ОАСУ — отраслевые АСУ; АСУП — АСУ предприятия; АСУО — АСУ объединения; ИПС — информационно-поисковые системы; ИСС — информационно-советующие системы; ИУС — информационно-управляющие системы. В силу значительного разнообразия АСУ их целесообразно классифицировать. АСУ — понятие многогранное и потому имеет большое число признаков классификации. Из них рассмотрим три основные (рис. 1.8).
Автоматизированная система управления технологическим процессом (АСУТП) — комплекс программных и технических средств, предназначенный для автоматизации управления технологическим оборудованием на предприятиях. Может иметь связь с более глобальной Автоматизированной системой управления предприятием (АСУП). Под АСУТП обычно понимается комплексное решение, обеспечивающее автоматизацию основных технологических операций технологического процесса на производстве, в целом или каком-то его участке, выпускающем относительно завершенный продукт. Термин «автоматизированный» в отличие от термина «автоматический» подчеркивает возможность участия человека в отдельных операциях, как в целях сохранения человеческого контроля над процессом, так и в связи со сложностью или нецелесообразностью автоматизации отдельных операций. Составными частями АСУТП могут быть отдельные системы автоматического управления (САУ) и автоматизированные устройства, связанные в единый комплекс. Как правило АСУТП имеет единую систему операторского управления технологическим процессом в виде одного или нескольких пультов управления, средства обработки и архивирования информации о ходе процесса, типовые элементы автоматики: датчики, контроллеры, исполнительные устройства. Для информационной связи всех подсистем используются промышленные сети.
9. Техническая структура АСУ ТП с управляющей ЭВМ (УВМ).
Рис. 1.7. Техническая структура АСУ ТП с управляющей ЭВМ, работающей в супервизорном режиме
Техническая структура АСУ ТП с управляющей ЭВМ, работающей в супервизорном режиме, приведена на рис. 1.7. Схема включает в себя следующие элементы: ОБ — управляемый объект; 1 — первичные измерительные приборы; 2 — исполнительные механизмы; 3 — подсистему дистанционного управления; 4 — подсистему логического управления; 5 — подсистему автоматического управления и регулирования; 6 — пульт оператора; 7 — индивидуальные вторичные измерительные приборы; 8 — устройства отображения информации, получаемой от ЭВМ; 9 — вычислительный комплекс (ЭВМ); 10 — человека-оператора; 11 — вышестоящую АСУ, с которой рассматриваемая АСУ ТП обменивается информацией.
Для возможности вмешательства оператора в ход технологического процесса все управляющие органы (а не только те, которые находятся в составе автоматической системы) снабжаются дистанционно управляемыми с пульта оператора серводвигателями; естественно, что оператор имеет возможность переводить на дистанционное управление также и любой серводвигатель, нормально управляемый регулятором или логическим контроллером. Подключение дистанционного управления к любому серводвигателю осуществляется также посредством соответствующего вызывного устройства.
10. Общая характеристика и классификация основных узлов УВМ. На рис. 5.1 показана структурная схема АСУ ТП, базирующаяся на УВМс исполнительными устройствами в виде АСУ ЭП и датчиками, установленными на технологическом оборудовании. УВМвключает в себя следующие элементы (блоки): 1)блок запоминающий сведения об объекте и текущие задания, поступающие во внешнюю память с пульта управления; 2)блок сбора и преобразования информации о текущем состоянии объекта и действующих возмущениях; 3)блок центральный — процессор, выполняющий заданные алгоритмом преобразования информации для выработки управляющего воздействия, организующий взаимодействие всех элементов УВМ,и состоящий из арифметического, логического, управляющего и оперативного запоминающего устройств (ОЗУ); 4)блок прямых связей с объектом управления, передающих управляющие воздействия. УВМимеют ряд вспомогательных элементов, необходимых для организации процесса управления. К ним относятся средства связи человека с машиной, предназначенные для получения оперативным персоналом информации о ходе технологического процесса, коррекции алгоритма управления и принятия необходимых мер в аварийных ситуациях и средства ввода—вывода информации, включающие различные регистрирующие, индицирующие и запоминающие устройства (перфоленточные, перфокарточные и строкопечатающие, записи на кассеты и гибкие диски), экранные пульты — дисплеи, пишущие машинки, графопостроители. На вход УВМот датчиков поступает текущая информация, в основном аналогового вида (напряжение, ток, частота, угол поворота и т.п.). Так как УВМ оперирует с дискретными величинами, то аналоговые сигналы датчиков необходимо преобразовывать в дискретную форму при помощи аналого-цифровых преобразователей. Однако для управления исполнительными механизмами (управляющими органами) в большинстве случаев необходимы непрерывные сигналы, а УВМвырабатывает управляющие сигналы в дискретной форме, поэтому необходимо осуществлять их цифро-аналоговое преобразование. Для уменьшения объема оборудования и стоимости аналого-цифровые (АЦП) и цифро-аналоговые (ЦАП) преобразователи производятся одноканальными, а для поочередного подключения сигналов от каждого датчика к общему АЦП используются коммутаторы.-
Рис. 5.1. Структура автоматизированного технологического комплекса
11. Принципы организации связи УВМ с технологическим объектом управления.
В составе АСУ ТП возможны различные принципы построения связи УВМ с объектом управления: синхронный, асинхронный и комбинированный.
Синхронный принцип При синхронномпринципе связи процесс управления разбивается на циклы равной длительности при помощи тактовых импульсов, выдаваемых таймерами. В каждом цикле, начинающемся с приходом тактового импульса на устройство управления, происходят последовательный опрос и преобразование сигналов датчиков в цифровую форму. Эти операции и запоминание преобразованных величин в УВМ должны происходить за интервал времени, в течение которого контролируемые параметры технологического процесса могут измениться лишь в допустимых пределах. После поступления очередной партии текущей информации к УВМ и ее запоминания происходит расчет новых значений управляющих воздействий и после их преобразования—передача к исполнительным органам. Закончив расчет управляющих воздействий, УВМ прерывает вычисления до прихода тактового импульса.
Асинхронный принцип Для того чтобы АСУ ТП имела возможность реагировать на события, вызванные отклонением хода технологического процесса от заданного, или аварийные ситуации, используется асинхронныйпринцип связи УВМ с объектом управления. Такая возможность обеспечивается введением функции прерывания. УВМ реагирует на импульсы прерывания с учетом приоритетного уровня одних сигналов прерывания перед другими. Необходимость ранжирования уровней приоритета вызвана тем, что одни события могут быть более важными, чем другие. Задаче с более высоким приоритетом разрешается останавливать обработку задачи, имеющей приоритет низшего ранга. После завершения обслуживания высокоприоритетного прерывания система возвращается к выполнению прерванной программы.
Поиск по сайту: |
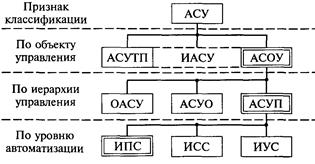 Анализируя первый признак классификации, следует отметить, что объектом управления в АСУТП являются машины или системы машин, а в АСОУ (АСУ на уровне цеха, предприятия и выше) — люди. В АСУТП информация передается сигналами, а в АСОУ — с помощью документов.
Анализируя первый признак классификации, следует отметить, что объектом управления в АСУТП являются машины или системы машин, а в АСОУ (АСУ на уровне цеха, предприятия и выше) — люди. В АСУТП информация передается сигналами, а в АСОУ — с помощью документов.
