|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Центр системы параллельных сил
Лекция 4. Центр тяжести. В данной лекции рассматриваются следующие вопросы 1. Центр тяжести твердого тела. 2. Координаты центров тяжести неоднородных тел. 3. Координаты центров тяжести однородных тел. 4. Способы определения координат центров тяжести. 5. Центры тяжести некоторых однородных тел.
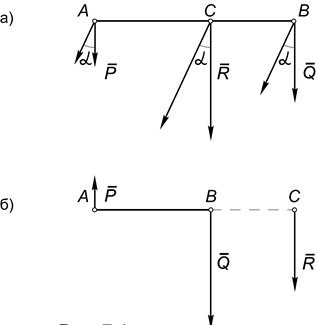
Изучение данных вопросов необходимо в дальнейшем для изучения динамики движении тел с учетом трения скольжения и трения качения, динамики движения центра масс механической системы, кинетических моментов, для решения задач в дисциплине «Сопротивление материалов». Приведение параллельных сил. После того как было рассмотрено приведение к центру плоской системы и произвольной пространственной системы сил, мы опять возвращаемся к рассмотрению частного случая системы параллельных сил. Приведение двух параллельных сил. В ходе рассмотрения такой системы сил возможны три следующих случая приведения. 1. Система двух коллинеарных сил. Рассмотрим систему двух параллельных и направленных в одну сторону сил P и Q, приложенных в точках А и В. Будем считать, что силы перпендикулярны к этому отрезку (рис.1,а). Выберем в качестве центра приведения точку С, принадлежащую отрезку АВ и удовлетворяющую условию: АС/СВ = Q/P. (1) Главный вектор системы RC = P + Q по модулю равен сумме этих сил: RC = P + Q. Главный момент относительно центра С с учетом (1) равен нулю: MC = P∙АС - Q∙СВ = 0. Таким образом, в результате приведения мы получили: RC ≠ 0, MC = 0. Это означает, что главный вектор эквивалентен равнодействующей, проходящей через центр приведения, то есть: Равнодействующая коллинеарных сил равна по модулю их сумме, а ее линия действия делит отрезок, соединяющий точки их приложения, обратно пропорционально модулям этих сил внутренним образом. Отметим, что положение точки С не изменится, если силы Р и Q повернуть на угол α. Точка С, обладающая таким свойством называется центром параллельных сил. 2. Система двух антиколлинеарных и не равных по модулю сил. Пусть силы P и Q , приложенные в точках А и В, параллельны, направлены в противоположные стороны и по модулю не равны (рис.1,б). Выберем в качестве центра приведения точку С, удовлетворяющую по-прежнему соотношению (1) и лежащую на той же прямой, но за пределами отрезка АВ. Главный вектор этой системы RC = P + Q по модулю теперь будет равен разности модулей векторов: RC = Q - P. Главный момент относительно центра С по-прежнему равен нулю: MC = P∙АС - Q∙СВ = 0, поэтому Равнодействующая антиколлинеарных и не равных по модулю сил равна их разности, направлена в сторону большей силы, а ее линия действия делит отрезок, соединяющий точки их приложения, обратно пропорционально модулям этих сил внешним образом.
Рис.1 3. Система двух антиколлинеарных и равных по модулю сил. Возьмем за исходный предыдущий случай приведения. Зафиксируем силу Р, а силу Q устремим по модулю к силе Р. Тогда при Q → Р в формуле (1) отношение АС/СВ → 1. Это означает, что АС → СВ , то есть расстояние АС →∞. При этом модуль главного вектора RC → 0, а модуль главного момента не зависит от положения центра приведения и остается равным первоначальному значению: MC = P∙АС - Q∙СВ = P∙(АС - СВ) = P∙АB. Итак, в пределе мы получили систему сил, для которой RC = 0, MC≠0, а центр приведения удален в бесконечность, которую нельзя заменить равнодействующей. В этой системе нетрудно узнать пару сил, поэтому пара сил равнодействующей не имеет.
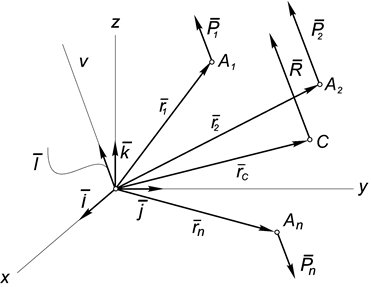
Центр системы параллельных сил. Рассмотрим систему n сил Pi, приложенных в точках Ai (xi, yi, zi) и параллельных оси Ov c ортом l (рис.2). Если заранее исключить случай системы, эквивалентной паре сил, нетрудно на основании предыдущего параграфа доказать существование ее равнодействующей R. Определим координаты центра C(xc, yc, zc) параллельных сил, то есть координаты точки приложения равнодействующей этой системы. Воспользуемся с этой целью теоремой Вариньона, на основании которой: M0 (R) = ΣM0 (Pi).
Рис.2
Вектор-момент силы можно представить в виде векторного произведения, поэтому: М0(R) = rc×R = ΣМ0i (Pi)= Σ(ri×Pi). Учитывая, что R = Rv∙l, а Pi = Pvi∙l и воспользовавшись свойствами векторного произведения, получим: rc×Rv∙l = Σ(ri ×Pvi∙l), rc∙Rv×l = Σ(ri∙Pvi×l) = Σ(ri∙Pvi)×l, или: [rcRv - Σ(ri Pvi )]×l = 0. Последнее выражение справедливо только в том случае, если выражение в квадратных скобках равно нулю. Поэтому, опуская индекс v и учитывая, что равнодействующая R = ΣPi , отсюда получим: rc = (ΣPi ri)/(ΣPi). Проектируя последнее векторное равенство на оси координат, получим искомое выражение координат центра параллельных сил: xc = (ΣPi xi)/( ΣPi); yc = (ΣPi yi)/( ΣPi); (2) zc = (ΣPi zi)/( ΣPi).
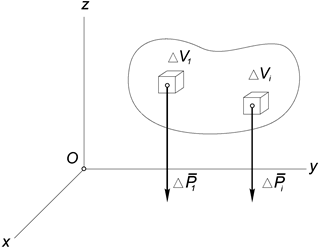
Центр тяжести тел. Координаты центров тяжести однородного тела. Рассмотрим твердое тело весом P и объемом V в системе координат Oxyz , где оси x и y связаны с поверхностью земли, а ось z направлена в зенит. Если разбить тело на элементарные части объемом ∆Vi , то на каждую его часть будет действовать сила притяжения ∆Pi, направленная к центру Земли. Предположим, что размеры тела значительно меньше размеров Земли, тогда систему сил, приложенных к элементарным частям тела можно считать не сходящейся, а параллельной (рис.3), и к ней применимы все выводы предыдущей главы.
Рис.3 Определение. Центром тяжести твердого тела называется центр параллельных сил тяжести элементарных частей этого тела. Напомним, что удельным весом элементарной части тела называется отношение ее веса ∆Pi к объему ∆Vi: γi = ∆Pi/∆Vi. Для однородного тела эта величина является постоянной: γi = γ = P/V. Подставляя в (2) ∆Pi = γi ∙∆Vi вместо Pi, учитывая последнее замечание и сокращая числитель и знаменатель на g, получим выражения координат центра тяжести однородного тела: xc = (Σ∆Vi∙xi)/(Σ∆Vi); yc = (Σ∆Vi∙yi)/(Σ∆Vi); (3) zc = (Σ∆Vi∙zi)/(Σ∆Vi). При определении центра тяжести полезны несколько теорем. 1) Если однородное тело имеет плоскость симметрии, то центр тяжести его находится в этой плоскости. Если оси х и у расположить в этой плоскости симметрии, то для каждой точки с координатами 2) Если однородное тело имеет ось симметрии, то центр тяжести тела находится на этой оси. Действительно, в этом случае, если ось z провести по оси симметрии, для каждой точки с координатами Аналогично доказывается и третья теорема. 3) Если однородное тело имеет центр симметрии, то центр тяжести тела находится в этой точке. И ещё несколько замечаний. Первое. Если тело можно разделить на части, у которых известны вес и положение центра тяжести, то незачем рассматривать каждую точку, а в формулах (3) Pi – определять как вес соответствующей части и Второе. Если тело однородное, то вес отдельной части его
И аналогично, Третье замечание. Пусть тело имеет вид тонкой пластинки площадью F и толщиной t, лежащей в плоскости Oxy. Подставляя в (3) ∆Vi = t∙∆Fi, получим координаты центра тяжести однородной пластинки: xc = (Σ∆Fi∙xi) / (Σ∆Fi); yc = (Σ∆Fi∙yi) / (Σ∆Fi). zc = (Σ∆Fi∙zi) / (Σ∆Fi). где Четвёртое замечание. Для тела в виде тонкого криволинейного стержня длиной L с площадью поперечного сечения a элементарный объем ∆Vi = a∙∆Li, поэтому координаты центра тяжести тонкого криволинейного стержня будут равны: xc = (Σ∆Li∙xi)/(Σ∆Li); yc = (Σ∆Li∙yi)/(Σ∆Li); (4) zc = (Σ∆Li∙zi)/(Σ∆Li). где Отметим, что согласно определению центр тяжести - это точка геометрическая; она может лежать и вне пределов данного тела (например, для кольца). Примечание. В этом разделе курса мы не делаем разницы между силой притяжения, силой тяжести и весом тела. В действительности сила тяжести представляет собой разность между силой притяжения Земли и центробежной силой, вызванной ее вращением.
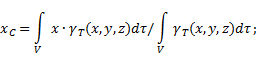
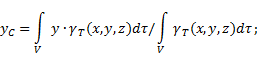
Координаты центров тяжести неоднородных тел. Координаты центра тяжести неоднородного твердого тела (рис.4) в выбранной системе отсчета определяются следующим образом:
Рис.4
где
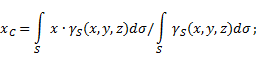
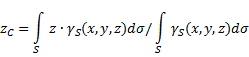
Если твердое тело представляет собой неоднородную поверхность (рис.5), то координаты центра тяжести в выбранной системе отсчета определяются следующим образом:
Рис.5
где
Если твердое тело представляет собой неоднородную линию (рис.6), то координаты центра тяжести в выбранной системе отсчета определяются следующим образом:
Рис.6
где
Поиск по сайту: |
 можно отыскать точку с координатами
можно отыскать точку с координатами  . И координата
. И координата  по (3), будет равна нулю, т.к. в сумме
по (3), будет равна нулю, т.к. в сумме  все члены имеющие противоположные знаки, попарно уничтожаются. Значит центр тяжести расположен в плоскости симметрии.
все члены имеющие противоположные знаки, попарно уничтожаются. Значит центр тяжести расположен в плоскости симметрии. и координаты
и координаты  и
и  , вычисленные по формулам (3), окажутся равными нулю.
, вычисленные по формулам (3), окажутся равными нулю. , где
, где  - удельный вес материала, из которого сделано тело, а Vi - объём этой части тела. И формулы (3) примут более удобный вид. Например,
- удельный вес материала, из которого сделано тело, а Vi - объём этой части тела. И формулы (3) примут более удобный вид. Например,
 где
где  - объём всего тела.
- объём всего тела. – общая площадь тела.
– общая площадь тела. .
.

 - вес единицы объема тела (удельный вес)
- вес единицы объема тела (удельный вес) - вес всего тела.
- вес всего тела.

 - вес единицы площади тела,
- вес единицы площади тела, - вес всего тела.
- вес всего тела.
 - вес единицы длины тела,
- вес единицы длины тела, - вес всего тела.
- вес всего тела.