|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Расчет составных систем ⇐ ПредыдущаяСтр 5 из 5
Под составными системами будем понимать конструкции, состоящие из нескольких тел, соединенных друг с другом. Прежде, чем переходить к рассмотрению особенностей расчета таких систем, введем следующее определение. Статически определимыми называются такие задачи и системы статики, для которых число неизвестных реакций связей не превышает максимально допустимого числа уравнений. Если число неизвестных больше числа уравнений, соответствующие задачи и системы называются статически неопределимыми. При этом разность между числом неизвестных и числом уравнений называется степенью статической неопределимости системы. Для любой плоской системы сил, действующих на твердое тело, имеется три независимых условия равновесия. Следовательно, для любой плоской системы сил из условий равновесия можно найти не более трех неизвестных реакций связи. В случае пространственной системы сил, действующих на твердое тело, имеется шесть независимых условия равновесия. Следовательно, для любой пространственной системы сил из условий равновесия можно найти не более шести неизвестных реакций связи. Поясним это на следующих примерах. 1. Пусть центр невесомого идеального блока (пример 4) удерживается при помощи не двух, а трех стержней: АВ, ВС и BD и нужно определить реакции стержней, пренебрегая размерами блока. С учетом условий задачи мы получим систему сходящихся сил, где для определения трех неизвестных: SA, SC и SD можно составить по-прежнему систему только двух уравнений: ΣX = 0, ΣY=0. Очевидно, поставленная задача и соответствующая ей система будут статически неопределимыми. 2. Балка, жестко защемленная на левом конце и имеющая на правом конце шарнирно-неподвижную опору, загружена произвольной плоской системой сил (рис.27). Для определения опорных реакций можно составить только три уравнения равновесия, куда войдут 5 неизвестных опорных реакций: XA, YA, MA, XB и YB. Поставленная задача будет дважды статически неопределимой. Такую задачу нельзя решить в рамках теоретической механики, предполагая рассматриваемое тело абсолютно твердым.
Рис.27
Вернемся к изучению составных систем, типичным представителем которых является трехшарнирная рама (рис. 28,а). Она состоит из двух тел: AC и BC, соединенным ключевым шарниром C. На примере этой рамы рассмотрим два способа определения опорных реакций составных систем. 1 способ. Рассмотрим тело AC, загруженное заданной силой Р, отбросив в соответствии с аксиомой 7 все связи и заменив их соответственно реакциями внешних (XA, YA) и внутренних (XC, YC) связей (рис. 28,б). Аналогично можно рассмотреть равновесие тела BC под действием реакций опоры В - (XB, YB) и реакций в соединительном шарнире C - (XC’, YC’) , где в соответствии с аксиомой 5: XC = XC’, YC = YC’. Для каждого из этих тел можно составить три уравнения равновесия, таким образом, общее число неизвестных: XA, YA , XC =XC’, YC =YC’, XB , YB равняется суммарному числу уравнений, и задача является статически определимой. Напомним, что по условию задачи требовалось определить только 4 опорные реакции, нам же пришлось проделать дополнительную работу, определяя реакции в соединительном шарнире. В этом и заключается недостаток данного способа определения опорных реакций. 2 способ. Рассмотрим равновесие всей рамы АВС, отбросив только внешние связи и заменив их неизвестными опорными реакциями XA, YA, XB , YB . Полученная система состоит из двух тел и не является абсолютно твердым телом, поскольку расстояние между точками А и В может изменяться вследствие взаимного поворота обеих частей относительно шарнира С. Тем не менее можно считать, что совокупность сил, приложенных к раме АВС образует систему, если воспользоваться аксиомой отвердевания (рис.28,в).
Рис.28
Итак, для тела АВС можно составить три уравнения равновесия. Например: ΣMA = 0; ΣX = 0; ΣY = 0. В эти три уравнения войдут 4 неизвестных опорных реакции XA, YA, XB и YB . Отметим, что попытка использовать в качестве недостающего уравнения, например такое: ΣMВ = 0 к успеху не приведет, поскольку это уравнение будет линейно зависимым с предыдущими. Для получения линейно независимого четвертого уравнения необходимо рассмотреть равновесие другого тела. В качестве него можно взять одну из частей рамы, например - ВС. При этом нужно составить такое уравнение, которое содержало бы «старые» неизвестные XA, YA, XB , YB и не содержало новых. Например, уравнение: ΣX(ВС) = 0 или подробнее: -XС’ + XB = 0 для этих целей не подходит, поскольку содержит «новое» неизвестное XС’, а вот уравнение ΣMС(ВС) = 0 отвечает всем необходимым условиям. Таким образом, искомые опорные реакции можно найти в следующей последовательности: ΣMA = 0; → YB = Р/4; ΣMВ = 0; → YА = -Р/4; ΣMС(ВС) = 0; → XB = -Р/4; ΣX = 0; → XА = -3Р/4. Для проверки можно использовать уравнение: ΣMС(АС) = 0 или, подробнее: -YА∙2 + XА∙2 + Р∙1 = Р/4∙2 -3Р/4∙2 + Р∙1 = Р/2 - 3Р/2 + Р = 0. Отметим, что в это уравнение входят все 4 найденные опорные реакции: XА и YА - в явной форме, а XB и YB - в неявной, поскольку они были использованы при определении двух первых реакций.
Графическое определение опорных реакций. Во многих случаях решение задач можно упростить, если вместо уравнений равновесия или в дополнение к ним непосредственно использовать условия равновесия, аксиомы и теоремы статики. Соответствующий подход и получил название графического определения опорных реакций. Прежде чем перейти к рассмотрению графического метода отметим, что, как и для системы сходящихся сил, графически можно решить только те задачи, которые допускают аналитическое решение. При этом графический метод определения опорных реакций удобен при небольшом числе нагрузок. Итак, графический метод определения опорных реакций основан главным образом на использовании: - аксиомы о равновесии системы двух сил; - аксиомы о действии и противодействии; - теоремы о трех силах; - условия равновесия плоской системы сил. При графическом определении реакций составных систем рекомендуется следующая последовательность рассмотрения: - выбрать тело с минимальным числом алгебраических неизвестных реакций связей; - если таких тел два или больше, то начать решение с рассмотрения тела, к которому приложено меньшее число сил; - если таких тел два или больше, то выбрать тело, для которого большее число сил известно по направлению. Решение задач. При решения задач этого раздела следует иметь в виду все те общие указания, которые были сделаны ранее. Приступая к решению, надо, прежде всего, установить, равновесие какого именно тела следует в данной задаче рассмотреть. Затем, выделив это тело и рассматривая его как свободное, следует изобразить все действующие на тело заданные силы и реакции отброшенных связей. Далее следует составить условия равновесия, применяя ту из форм этих условий, которая приводит к более простой системе уравнений (наиболее простой будет система уравнений, в каждое из которых входит по одному неизвестному). Для получения более простых уравнений следует (если это только не усложняет ход расчета): 1) составляя уравнения проекций, проводить координатную ось, перпендикулярно какой-нибудь неизвестной силе; 2) при составлении моментного уравнения в качестве моментной целесообразно выбирать точку, где пересекаются линии действия двух неизвестных опорных реакций из трех – в этом случае они не войдут в уравнение, и оно будет содержать только одно неизвестное; 3) если две неизвестных опорных реакции из трех параллельны, то при составлении уравнения в проекциях на ось последнюю следует направить так, чтобы она была перпендикулярна к двум первым реакциям – в этом случае уравнение будет содержать только последнее неизвестное; 4) при решении задачи систему координат надо выбирать так, чтобы ее оси были ориентированы так же, как большинство приложенных к телу сил системы. При вычислении моментов иногда бывает удобно разлагать данную силу на две составляющие и, пользуясь теоремой Вариньона, находить момент силы как сумму моментов этих составляющих. Решение многих задач статики сводится к определению реакций опор, с помощью которых закрепляются балки, мостовые фермы и т. п.
Пример 7. К кронштейну, изображенному на рис.29, а, в узле В подвешен груз весом 36 кН. Соединения элементов кронштейна шарнирные. Определить усилия, возникающие в стержнях АВ и ВС, считая их невесомыми. Решение. Рассмотрим равновесие узла В, в котором сходятся стержни АВ и ВС. Узел В представляет собой точку на чертеже. Так как груз подвешен к узлу В, то в точке В прикладываем силу F, равную весу подвешенного груза. Стержни ВА и ВС, шарнирно соединенные в узле В, ограничивают возможность любого его линейного перемещения в вертикальной плоскости, т.е. являются связями по отношению к узлу В.
Рис. 29. Расчетная схема кронштейна к примеру 7: а – расчетная схема; б – система сил в узле B
Мысленно отбрасываем связи и заменяем их действия силами - реакциями связей RА и RС. Так как стержни невесомые, то реакции этих стержней (усилия в стержнях) направлены вдоль оси стержней. Предположим, что оба стержня растянуты, т.е. их реакции направлены от шарнира внутрь стержней. Тогда, если после расчета реакция получится со знаком минус, то это будет означать, что на самом деле реакция направлена в сторону, противоположную указанной на чертеже, т.е. стержень будет сжат. На рис. 29, б показано, что в точке В приложены активная сила F и реакции связей RА и RС. Видно, что изображенная система сил представляет плоскую систему сил, сходящихся в одной точке. Выбираем произвольно оси координат OX и OY и составляем уравнения равновесия вида: ΣFx = 0; -Ra - Rccos𝛼 = 0; ΣFy = 0; -F - Rc cos (90 - α) = 0. Учитывая, что cos (90 - α) = sinα, из второго уравнения находим Rc = -F/sinα = -36/0,5 = -72 кН. Подставив значение Rc в первое уравнение, получим Ra = -Rc cosα= - (-72) ∙0,866 = 62,35 кН. Таким образом, стержень АВ - растянут, а стержень ВС - сжат. Для проверки правильности найденных усилий в стержнях спроектируем все силы на любую ось, не совпадающую с осями X и Y, например, ось U: ΣFu = 0; -Rc - Ra cosα - F cos (90- α) = 0. После подстановки значений найденных усилий в стержнях (размерность в килоньютонах) получим - (-72) – 62,35∙0,866 - 36∙0,5 = 0; 0 = 0. Условие равновесия выполняется, таким образом, найденные усилия в стержнях верны.
Пример 8.Балка строительных подмостей, весом которой можно пренебречь удерживается в горизонтальном положении гибкой тягой СD и шарнирно опирается на стену в точке А. Найти усилие в тяге СD, если на край подмостей встанет рабочий весом 80 кг ≈0,8 кН (рис.30, а).
Рис. 30. Расчетная схема подмостей к примеру 8: а – расчетная схема; б – система сил действующих на подмости
Решение. Выделяем объект равновесия. В данном примере объектом равновесия является балка подмостей. В точке В на балку действует активная сила F, равная весу человека. Связями в данном случае являются неподвижный опорный шарнир А и тяга CD. Мысленно отбросим связи, заменив их действие на балку, реакциями связей (рис. 30, б). Реакцию неподвижной шарнирной опоры по условию задачи определять не нужно. Реакция в тяге CD направлена вдоль тяги. Предположим, что стержень CD растянут, т.е. реакция RD направлена от шарнира С внутрь стержня. Разложим реакцию RD, по правилу параллелограмма, на горизонтальную и вертикальную составляющие: RDxгор =RD cosα; RDyверт = RD cos(90-α) =RD sinα. В результате получили произвольную плоскую систему сил, необходимым условием равновесия которой является равенство нулю трех независимых условий равновесия,. В нашем случае удобно первым записать условие равновесия в виде суммы моментов относительно моментной точки А, так как момент опорной реакции RA относительно этой точки равен нулю: ΣmA = 0; F∙3a - Rdy∙a = 0 или F∙3a - RD sinα= 0. Значение тригонометрических функций определим из треугольника АСD: cosα = АC/CD = 0,89, sinα = AD/CD = 0,446. Решая уравнение равновесия, получим RD = 5,38 кH. (Тяж СD - растянут). Для проверки правильности вычисления усилия в тяже CD необходимо вычислить хотя бы одну из составляющих опорной реакции RA. Воспользуемся уравнением равновесия в виде ΣFy = 0; VA + RDy - F = 0 или VA = F - Rdy. Отсюда VA = -1,6 кН. Знак минус означает, что вертикальная составляющая реакции RA на опоре направлена вниз. Проверим правильность вычисления усилия в тяже. Используем еще одно условие равновесия в виде уравнений моментов относительно точки В. ΣmB = 0; VA ∙3а + RDy∙2a = 0; -1,6∙3а + 5,38∙0,446∙2а = 0; 0 = 0. Условия равновесия соблюдаются, таким образом, усилие в тяже найдено верно.
Пример 9.Вертикальный бетонный столб забетонирован нижним концом в горизонтальное основание. Сверху на столб передается нагрузка от стены здания весом 143 кН. Столб изготовлен из бетона плотностью γ= 25 кН/м3. Размеры столба показаны на рис. 31, а. Определить реакции в жесткой заделке.
Рис. 31. Расчетная схема столба к примеру 9: а – схема загрузки и размеры столба; б – расчетная схема
Решение. В данном примере объектом равновесия является столб. Столб загружен следующими типами активных нагрузок: в точке А сосредоточенной силой F, равной весу стены здания, и собственным весом столба в виде равномерно распределенной по длине бруса нагрузки интенсивностью q на каждый метр длины столба: q = 𝛾А, где А - площадь поперечного сечения столба. q = 25∙0,51∙0.51 = 6,5 кН/м. Связями в данном примере является жесткая заделка в основании столба. Мысленно отбросим заделку и заменим ее действие реакциями связей (рис. 31, б). В нашем примере рассматривается частный случай действия системы сил, перпендикулярных заделке и проходящих по одной оси через точку приложения опорных реакций. Тогда две опорные реакции: горизонтальная составляющая и реактивный момент будут равны нулю. Для определения вертикальной составляющей опорной реакции спроектируем все силы на ось элемента. Совместим эту ось с осью Z, тогда условие равновесия запишется в следующем виде: ΣFZ = 0; VB - F - ql = 0, где ql - равнодействующая распределенной нагрузки. Отсюда VB = F +ql=143 + 6,5∙4 = 169 кН. Знак плюс указывает, что реакция VB направлена вверх. Для проверки правильности вычисления опорной реакции остается еще одно условие равновесия - в виде алгебраической суммы моментов всех сил относительно любой точки, не проходящей через ось элемента. Предлагаем выполнить эту проверку самостоятельно.
Пример 10.Для балки, изображенной на рис.32, а, требуется определить опорные реакции. Дано: F = 60 кН, q = 24 кН/м, М = 28 кН∙м.
Рис. 32. Расчетная схема и размеры балки к примеру 10: а – расчетная схема; б – объект равновесия Решение. Рассмотрим равновесие балки. Балка загружена активной нагрузкой в виде плоской системы параллельных вертикальных сил, состоящих из сосредоточенной силы F, равномерно распределенной нагрузки интенсивностью q с равнодействующей Q, приложенной в центре тяжести грузовой площади (рис. 32, б), и сосредоточенного момента М, который можно представить в виде пары сил. Связями в данной балке являются шарнирно-неподвижная опора А и шарнирно-подвижная опора В. Выделим объект равновесия, для этого отбросим опорные связи и заменим их действия реакциями в этих связях (рис. 32, б). Реакция подвижной опоры RB направлена вертикально, а реакция шарнирно-неподвижной опоры RA будет параллельна активной системе действующих сил и направлена также вертикально. Предположим, что они направлены вверх. Равнодействующая распределенной нагрузки Q = 4,8∙q приложена в центре симметрии грузовой площади. При определении опорных реакций в балках необходимо стремиться так составлять уравнения равновесия, чтобы в каждое из них входило только одно неизвестное. Этого можно добиться, составляя два уравнения моментов относительно опорных точек. Проверку опорных реакций обычно проводят, составляя уравнение в виде суммы проекций всех сил на ось, перпендикулярную оси элемента. Примем условно направление вращения момента опорных реакций вокруг моментных точек за положительное, тогда противоположное направление вращения сил будем считать отрицательным. Необходимым и достаточным условием равновесия в данном случае является равенство нулю независимых условий равновесия в виде: ΣmA = 0; VB ∙6 - q∙4,8∙4,8 + M + F∙2,4 = 0; ΣmB = 0; VA∙6 - q∙4,8∙1,2 - M - F∙8,4 = 0. Подставляя численные значения величин, находим VB = 14,4 кН, VA = 15,6 кН. Для проверки правильности найденных реакций используем условие равновесия в виде: ΣFy = 0; VA + VB - F -q∙4,8 =0. После подстановки численных значений в это уравнение получаем тождество типа 0=0. Отсюда делаем выводы, что расчет выполнен верно и реакции на обеих опорах направлены вверх.
Пример 11.Определить опорные реакции для балки, изображенной на рис.33, а. Дано: F = 2,4 кН, M = 12 кН∙м, q = 0,6 кН/м, a = 60°.
Рис. 33. Расчетная схема и размеры балки к примеру 11: а – расчетная схема; б – объект равновесия Решение. Рассмотрим равновесие балки. Мысленно освобождаем балку от связей на опорах и выделяем объект равновесия (рис. 33, б). Балка загружена активной нагрузкой в виде произвольной плоской системы сил. Равнодействующая распределенной нагрузки Q = q∙3 приложена в центре симметрии грузовой площади. Силу F разложим по правилу параллелограмма на составляющие – горизонтальную и вертикальную Fz = Fcosα= 2,4 cos60° = 1,2 кН; Fy =Fcos(90-α) = F sin60° = 2,08 кН. Прикладываем к объекту равновесия вместо отброшенных связей реакции. Предположим, вертикальная реакция VA шарнирно подвижной опоры А направлена вверх, вертикальная реакция VB шарнирно неподвижной опоры B направлена также вверх, а горизонтальная реакция HВ - вправо. Таким образом, на рис. 33, б изображена произвольная плоская система сил, необходимым условием равновесия которой является равенство нулю трех независимых условий равновесия для плоской системы сил. Напомним, что, согласно теореме Вариньона, момент силы F относительно любой точки равен сумме моментов составляющих Fz и Fy относительно этой же точки. Примем условно, направление вращения момента опорных реакций вокруг моментных точек за положительное, тогда противоположное направление вращение сил будем считать отрицательным. Тогда условия равновесия удобно составить в следующем виде: ΣFz = 0; - Fz + HB = 0; отсюда HB = 1,2 кН; ΣmA = 0; VB∙6 + M - Fy ∙2 + 3q∙0.5 = 0; отсюда VB = - 1,456 кН; ΣmB = 0; VA ∙6 - 3q∙6,5 - Fy ∙4 - M = 0; отсюда VA = 5,336 кН. Для проверки правильности вычисленных реакций используем еще одно условие равновесия, которое не использовали, например: ΣFy = 0; VA + VB - 3q - Fy = 0. После подстановки численных значений получаем тождество 0=0. Вертикальная опорной реакции VB получилась со знаком минус, это показывает, что в данной балке она направлена не вверх, а вниз.
Пример 12.Определить опорные реакции для балки, жестко заделанной с одной стороны и изображенной на рис. 34, а. Дано: q =20 кН/м.
Рис. 34. Расчетная схема и размеры балки к примеру 12: а – расчетная схема; б – объект равновесия
Решение. Выделим объект равновесия. Балка загружена активной нагрузкой в виде плоской системы параллельных сил, расположенных вертикально. Мысленно освобождаем балку от связей в заделке и заменяем их реакциями в виде сосредоточенной силы VB и пары сил с искомым реактивным моментом МB (см. рис.34, б). Так как активные силы действуют только в вертикальном направлении, то горизонтальная реакция НB равна нулю. Примем условно направление вращения момента опорных реакций вокруг моментных точек по часовой стрелке за положительное, тогда противоположное направление вращения сил будем считать отрицательным. Составляем условия равновесия в виде ΣFy = 0; VB - q∙1,6 = 0; ΣmB = 0; MB - q∙1,6∙1,2 = 0. Здесь q∙1,6 – равнодействующая распределенной нагрузки. Подставив численные значения распределенной нагрузки q, находим VВ = 32 кН, МB = 38,4 кН∙м. Для проверки правильности найденных реакций составим еще одно условие равновесия. Теперь возьмем за моментную точку какую-нибудь другую точку, например правый конец балки, тогда: ΣmA = 0; MB – VB∙2 + q∙1,6∙0,8 = 0 . После подстановки численных значений получаем тождество 0=0. Окончательно делаем выводы, что опорные реакции найдены верно. Вертикальная реакция VB направлена вверх, а реактивный момент МВ - по часовой стрелке.
Пример 13. Определить опорные реакции балки (рис.35, а). Решение. В качестве активной нагрузки выступает равнодействующая распределенной нагрузки Q=(1/2)∙aq=(1/2)∙3∙2=3кН, линия действия которой проходит на расстоянии 1 м от левой опоры, сила натяжения нити Т = Р = 2 кН, приложенная на правом конце балки и сосредоточенный момент. Поскольку последний можно заменить парой вертикальных сил, то действующая на балку нагрузка вместе с реакцией подвижной опоры В образует систему параллельных сил, поэтому реакция RA будет также направлена вертикально (рис.35, б). Для определения этих реакций воспользуемся уравнениями равновесия. ΣMA = 0; -Q∙1 + RВ∙3 - M + Т∙5 = 0, откуда RВ = (1/3) (Q + M - Р∙5) = (1/3) (3 + 4 - 2∙5) = -1 кН. ΣMB = 0; - RA∙3 + Q∙2 - M + Т∙2 = 0, RA = (1/3) (Q∙2 - M + Р∙2) = (1/3) (3∙2 - 4 + 2∙2) = 2 кН.
Рис.35
Чтобы проверить правильность полученного решения, воспользуемся дополнительным уравнением равновесия: ΣYi = RA - Q + RВ + Т = 2 - 3 - 1 + 2 = 0, то есть, задача решена правильно. Пример 14. Найти опорные реакции консольной балки, загруженной распределенной нагрузкой (рис.36, а). Решение. Равнодействующая распределенной нагрузки приложена в центре тяжести грузовой эпюры. Чтобы не искать положение центра тяжести трапеции, представим ее в виде суммы двух треугольников. Тогда заданная нагрузка будет эквивалентна двум силам: Q1 = (1/2)∙3∙2 = 3 кН и Q2 = (1/2)∙3∙4 = 6 кН, которые приложены в центре тяжести каждого из треугольников (рис.36,б).
Рис.36
Опорные реакции жесткого защемления представлены силой RA и моментом MA, для определения которых удобнее использовать уравнения равновесия системы параллельных сил, то есть: ΣMA = 0; MA = 15 кН∙м; ΣY = 0, RA = 9 кН. Для проверки воспользуемся дополнительным уравнением ΣMВ = 0, где точка В находится на правом конце балки: ΣMВ = MA - RA∙3 + Q1∙2 + Q2∙1 = 15 - 27 + 6 +6 = 0.
Пример 15. Однородная балка весом Q = 600 Н и длиной l = 4 м опирается одним концом на гладкий пол, а промежуточной точкой Вна столб высотой h = 3 м, образуя с вертикалью угол 30°. В таком положении балка удерживается веревкой, протянутой по полу. Определить натяжение веревки T и реакции столба - RB и пола - RA (рис.37,а). Решение.Под балкой или стержнем в теоретической механике понимают тело, у которого поперечными размерами в сравнении с его длиной можно пренебречь. Таким образом, вес Q однородной балки приложен в точке С, где АС = 2 м.
Рис.37
1) Поскольку две неизвестных реакции из трех приложены в точке А, первым следует составить уравнение ΣMA = 0, так как туда войдет только реакция RB: -RB ∙АВ+ Q∙(l/2)∙sin30° = 0, где АВ = h/cos30°= 2 Подставляя в уравнение, получим: RB ∙2 откуда RB = 600/ (2 Аналогично из моментного уравнения можно было бы найти и реакцию RA, выбрав в качестве моментной точку, где пересекаются линии действия RB и Т. Однако это потребует дополнительных построений, поэтому проще воспользоваться другими уравнениями равновесия: 2) ΣX = 0; RB ∙cos30° - Т = 0; → Т = RB ∙cos30°= 100 3) ΣY = 0, RB∙sin30°- Q + RA = 0; → RA = Q - RB∙sin30°= 600 - 50 Таким образом, мы нашли Т и RA через RB , поэтому проверить правильность полученного решения можно с помощью уравнения: ΣMB = 0, куда в явном или неявном виде войдут все найденные реакции: RA∙АВ sin30°- Т∙АВ cos30° - Q∙(АВ - l/2)∙sin30°= 513∙2 Полученная в результате округления невязка ∆= -0,5 называется абсолютной погрешностью вычисления. Для того чтобы ответить на вопрос насколько точным является полученный результат, вычисляют относительную погрешность, которая определяется по формуле: ε=[|∆| / min(|Σ+|, |Σ-|)]∙100% =[|-0,5| / min(|887,5|, |-888|)]∙100% = (0,5/887,5)∙100% = 0,06%.
Пример 16. Определить опорные реакции рамы (рис.38). Здесь и в дальнейшем, если не оговорено специально, все размеры на рисунках будем считать указанными в метрах, а силы - в килоньютонах.
Рис.38
Решение. Рассмотрим равновесие рамы, к которой в качестве активной приложена сила натяжения нити Т, равная весу груза Q. 1) Реакцию подвижной опоры RB найдем из уравнения ΣMA = 0. Чтобы при этом не вычислять плечо силы Т, воспользуемся теоремой Вариньона, разложив эту силу на горизонтальную и вертикальную составляющие: RB∙2 + Т sin30°∙3 - Т cos30°∙4 = 0; → RB = (1/2)∙ Q(cos30°∙4 - sin30°∙3) = (5/4) ∙ (4 2) Для вычисления YA составим уравнение ΣMС = 0, где точка С лежит на пересечении линий действия реакций RB и ХA: - YA∙2 + Т sin30°∙3 - Т cos30°∙2 = 0; → YA = (1/2)∙ Q(sin30°∙3 -cos30°∙2) = (5/4) ∙ (3 -2 3) Наконец, находим реакцию ХA: ΣX = 0; ХA - Т sin30° = 0; → ХA = Q sin30° = 5/2 кН. Поскольку все три реакции были найдены независимо друг от друга, для проверки нужно взять уравнение, в которое входит каждая из них: ΣMD = ХA∙3 - YA∙4 - RB∙2 = 15/2 - 5∙(3 -2
Пример 17. Определить опорные реакции стержня, имеющего ломаное очертание (рис.39,а). Решение. Заменяем распределенную нагрузку на каждом участке стержня сосредоточенными силами Q1 = 5 кН и Q2 = 3 кН, а действие отброшенного жесткого защемления - реакциями ХA ,YA и MА (рис.39,б).
Рис.39
1) ΣMА = 0; MА -Q1∙2,5 - Q2∙5,5 = 0; → MА = 5∙2,5 + 3∙5,5 = 12,5 + 16,5 = 29 кНм. 2) ΣX = 0; ХA + Q1∙sina = 0; → ХA = -5∙(3/5) = -3 кН. 3) ΣY = 0; YA - Q1 cosa - Q2 = 0; → YA = 5∙(4/5) + 3 = 4 + 3 = 7 кН, так как sinα = 3/5, cosα = 4/5. Проверка: ΣMВ = 0; MА + ХA∙3 - YA∙7 + Q1cosα∙4,5 + Q1sinα∙1,5 + Q2∙1,5 = 29 -3∙3 - 7∙7 + 5∙(4/5)∙5 + 5∙(3/5)∙1,5 + 3∙1,5 = 29 - 9 - 49 + 20 + 4,5 + 4,5 = 58 - 58 = 0.
Пример 18. Для рамы изображенной на рис.40, а, требуется определить опорные реакции. Дано: F = 50 кН , М = 60 кН∙м , q = 20 кН/м. Решение. Рассмотрим равновесие рамы. Мысленно освобождаем раму от связей на опорах (рис.40, б) и выделяем объект равновесия. Рама загружена активной нагрузкой в виде произвольной плоской системы сил. Вместо отброшенных связей прикладываем к объекту равновесия реакции: на шарнирно-неподвижной опоре А - вертикальную VA и горизонтальную HA, а на шарнирно-подвижной опоре В - вертикальную реакцию VB Предполагаемое направление реакций показано на рис.40, б.
Рис.40. Расчетная схема рамы и объект равновесия к примеру 18: а – расчетная схема; б – объект равновесия
Составляем следующие условия равновесия: ΣFx = 0; -HA + F = 0; HA = 50 кН. ΣmA = 0; VB∙6 + M - q∙6∙3 - F∙6 = 0; VB = 100 кН. ΣFy = 0; VA + VB - q∙6 = 0; VA = 20 кН. Здесь условно принято направление вращения вокруг моментных точек против движения часовой стрелки за положительное. Для проверки правильности вычисления реакций используем условие равновесия, в которое входили бы все опорные реакции, например: ΣmC = 0; VB∙3 + M – HA∙6 – VA∙3 = 0. После подстановки численных значений получаем тождество 0=0. Таким образом, направления и величины опорных реакций определены верно.
Пример 19.Определить опорные реакции рамы (рис.41,а).
Рис.41
Решение. Как и в предыдущем примере, рама состоит из двух частей, соединенных ключевым шарниром С. Распределенную нагрузку, приложенную к левой части рамы, заменяем равнодействующей Q1, а к правой - равнодействующей Q2, где Q1 = Q2 = 2кН. 1) Находим реакцию RB из уравнения ΣMС(ВС) = 0; → RB = 1кН; Рассмотрим равновесие всей рамы как абсолютно твердого тела. Поскольку Q1, Q2и RB образуют систему параллельных сил, реакции в точке А будут представлены вертикально направленной силой RА и реактивным моментом МА (рис.37,б), поэтому можно составить следующие уравнения равновесия: 2) ΣMА = 0; → MА = 4 кН∙м; 3) ΣY = 0; → RА = 3 кН. Проверка: ΣMС(АС) = MА - RА∙2 + Q1∙1 = 4 - 3∙2 + 2∙1 = 6 - 6 = 0.
Пример 20. Определить опорные реакции рамы (рис.42,а).
Рис.42
Решение. В отличие от двух предыдущих примеров формальное определение опорных реакции в этой задаче требует совместного рассмотрения системы уравнений: ΣMА =0; M + YВ∙3 - XB∙1 = 0; ΣMС(СВ) =0; M + YВ∙1 + XB∙1 = 0. Ее решением будет: XB = -M/2; YВ = -M/2. Рассматривая затем равновесие всей рамы в целом, получим: ΣХ = 0; XА + XB = 0; → XА = M/2; ΣY = 0; YА + YВ = 0; → YА = M/2. Проверка. ΣMС(АС) = XА∙1 - YА∙3 + M =M/2 - M/2 + M = 0. Пример 21.Определить реакции в опорах и в соединительном шарнире трехшарнирной арки (рис.43,а).
Рис.43
Решение. Находим опорные реакции: 1) ΣMА = 0; → YВ = Р/2; 2) ΣMС(СВ) = 0; → ХВ = -Р/2; 3) ΣMВ= 0; → YА = Р/2; 4) ΣХ = 0; → XА = Р/2. Для определения реакций в соединительном шарнире нужно рассмотреть равновесие одной из частей рамы. При этом результат будет зависеть от того, к какой части считать приложенной силу Р. Например, считая эту силу приложенной к телу АС, получим из условий равновесия левой части (рис.43,б): ΣХ(АС) = 0; → XC = –Р/2; ΣY(АС) = 0; → YC = -Р/2. А если считать силу Р поделенной поровну между левой и правой частями рамы, то YC будет равняться нулю. В общем случае эту силу можно поделить в любом соотношении между частями рамы, но в сумме с реакцией YC она всегда будет равняться - Р/2.
Пример 22.Определить графически опорные реакции рамы, изображенной на рис.44.
Рис.44
Решение. Система состоит из двух тел, имеющих равное число алгебраических неизвестных: 4 - для АС (XA, YA, XC, YC) и 4 - для ВС (XB, YB, XC’, YC’), но на тело АС действуют три силы (P, RA, RC), а на ВС - только две (RВ, RC’), поэтому начинаем решение с рассмотрения тела ВС. Согласно второй аксиоме RВ и RC’ действуют вдоль прямой, соединяющей точки их приложения, то есть по прямой ВС. Рассмотрим равновесие всей рамы АВС как твердого тела. На нее действует уравновешенная система трех непараллельных сил, которая в силу теоремы о трех силах должна быть сходящейся, поэтому реакция RA должна проходить через точку К, где пересекаются линии действия RВ и RC’ (рис.44,а). Строим силовой треугольник, проводя через начало и конец вектора Р прямые, параллельные направлениям RA и RВ до их пересечения (рис.44,б). Из подобия силового треугольника Oab и треугольника ВАК на чертеже находим искомые реакции: RВ /P = ( |XА|/P = 3/4; XА = -(3/4)P; YА = -P/4. Пример 23. Определить графически опорные реакции рамы, показанной на рис.45.
Рис.45
Решение. Начинаем рассмотрение с части, на которую действуют только две силы, и по аксиоме 2 определяем линию действия RA (рис.45). Рассматривая равновесие рамы в целом, приходим к заключению, что опорные реакции RA и RВ должны составить пару, которая уравновесит приложенный к раме момент. Отсюда следует, что RA = RВ = М/ XА = YА = RA (
Примечания к решению задач: 1. При решении задач с большим числом нагрузок – например, при выполнении расчетно-проектировочных работ все вычисления удобнее делать в десятичных дробях. В этом случае все результаты и проверка будут получаться с некоторым приближением, но относительная погрешность независимо от величин определяемых реакций и даже при использовании самых скромных вычислительных средств не должна выходить за пределы 1%. 2. Если проверка не выполняется и не удается найти ошибку, то нужно, во-первых, постараться ее локализовать, то есть выяснить, какие из вычисленных реакций найдены неверно, и воспользоваться для их определения альтернативными уравнениями. Во-вторых, можно воспользоваться следующим приемом, который вытекает из свойств систем линейных алгебраических уравнений: опорные реакции от заданной нагрузки равны сумме опорных реакций от каждой нагрузки в отдельности.
Вопросы для самопроверки - Какая система сил называется сходящейся? - Как определить равнодействующую системы сходящихся сил путем построения силового многоугольника? - Какие силы называются сходящимися? Как определить их равнодействующую? - Что называется главным вектором плоской системы сил? - Что называется главным моментом плоской системы сил относительно какого-нибудь центра? - Составьте условие равновесия для произвольной плоской системы сил. - Составьте условие равновесия для системы сходящихся сил. - Составьте условие равновесия для плоской системы параллельных сил. - Сформулируйте геометрическое условие равновесия системы сходящихся сил. - Что называется главным вектором системы сил? - В чем различие между главным вектором и равнодействующей системы сил? - Для какой системы сил равнодействующая и главный вектор совпадают? - Назовите методы определения равнодействующей системы сходящихся сил. - Как выражаются проекции равнодействующей системы сходящихся сил через проекции сил этой системы? - Определите величину силы по известным проекциям - Определить модуль и направления силы, если известны ее проекции - Назовите необходимое и достаточное условие равновесия системы сходящихся сил. - Что такое силовой многоугольник? - Запишите условие равновесия системы сходящихся сил в векторной форме. - Сформулируйте условия равновесия системы сходящихся сил в координатной форме. - Какие задачи позволяют решать условия равновесия системы сходящихся сил? - Какой из силовых многоугольников на рисунке относится к уравновешенной системе сходящихся сил?
- Как определяется направление равнодействующей системы сходящихся сил при построении силового многоугольника? - Каковы условия и каковы уравнения равновесия системы сходящихся сил, расположенных в пространстве и плоскости? - Возможно ли равновесие трех сходящихся сил, не лежащих в одной плоскости? - Обязательно ли будет находиться в равновесии тело, если на него в одной плоскости действуют три силы и линии их действия пересекаются в одной точке? - Что называется равнодействующей системы сил? - Как сложить силы: а) геометрически, б) аналитически? - Как разложить силу по двум заданным направлениям? - Что называется моментом силы относительно центра на плоскости? - Какая система сил называется парой? - Можно ли заменить действие пары сил на тело одной силой? - Что такое момент пары? - Какая плоскость называется плоскостью действия пары? - Какие пары называются эквивалентными? - Что называется плечом пары? - Запишите векторную и скалярную зависимости между элементами пары. - Почему пара сил не имеет равнодействующей? - Имеет ли пара сил равнодействующую? - Каким образом можно уравновесить действие на тело пары сил? - Что такое момент пары сил? - Изменятся ли моменты пар сил, если положения сил, показанные на рис. а, изменить на положения, показанные на рис. б?
- Какие пары называются эквивалентными? - Эквивалентны ли пары сил, изображенные на рисунке?
- Каким образом производится сложение пар сил? - Сформулируйте условие равновесия пар сил. - Какие уравнения и сколько их можно составить для уравновешенной плоской системы сходящихся сил? - Сформулируйте теорему о равновесии трех непараллельных сил, лежащих в одной плоскости. - Чем характеризуется действие пары сил на твердое тело? - Как направлен вектор момента пары сил? - Как определяются моменты пар сил, лежащих в одной плоскости? - Каковы условия эквивалентности пар сил на плоскости и в пространстве? - Какие преобразования пары сил не изменяют ее действия на твердое тело? - Почему момент пары сил является свободным вектором? - Чему равен момент пары сил, эквивалентной двум парам сил, расположенным в пересекающихся плоскостях? - Чему равен момент пары сил, эквивалентной системе пары сил, расположенных в пространстве и в одной плоскости? - Каковы условия равновесия системы пар сил, расположенных в пространстве и в одной плоскости? - Чем можно уравновесить заданную пару сил? - Как направлены реакции опор балки, нагруженной парой сил и лежащей на двух опорах, из которых одна – шарнирно-неподвижная, а другая – на катках? - Какой третьей парой сил можно уравновесить две пары сил, лежащие в пересекающихся плоскостях? - Сформулируйте теоремы об эквивалентности пар. - Что называется результирующей парой? - Запишите формулу для определения результирующей системы пар. - Назовите условия равновесия плоской системы пар. - Приведите векторную запись условия равновесия произвольной системы пар. - При каких условиях плоская система сил приводится к равнодействующей? - Чему равен главный вектор плоской системы сил, которая может быть приведена к равнодействующей? - В каком случае главный момент плоской системы сил не зависит от выбора центра приведения? - Что такое момент силы относительно точки? - Будет ли изменяться момент силы относительно точки, если, не меняя направления, переносить силу вдоль линии ее действия? - На тело действуют две силы F1 = 40 Н и F2 = 50 Н, как показано на рисунке (а = 0,5 м, b = 0,8 м,
- Что такое главный вектор и главный момент плоской системы сил? - Как аналитически найти главный вектор и главный момент данной плоской системы сил? - В чем сходство и в чем различие между главным вектором плоской системы сил и ее равнодействующей? - Сформулируйте теорему Вариньона. - Приведите векторную запись теоремы Вариньона. - Сформулируйте теорему Вариньона для произвольной плоской системы сил. - Чему равен главный вектор системы сил? - Чему равен главный момент системы сил при приведении ее к точке? - Тело движется равномерно и прямолинейно (равновесие). Чему равны главный вектор и главный момент системы? - Тело вращается вокруг неподвижной оси. Чему равны главный вектор и главный момент действующей на него системы сил? - Зависят ли главный вектор и главный момент заданной системы сил от выбора центра приведения? - Каковы возможные случаи приведения сил, расположенных произвольно на плоскости? - К какому простейшему виду можно привести систему сил, если известно, что главный момент этих сил относительно различных точек на плоскости: а) имеет различную числовую величину; б) имеет постоянное значение, не равное нулю; в) равен нулю. - Как определяется модуль и направление главного вектора системы параллельных сил на плоскости? - При каком условии сила, равная главному вектору плоской системы сил, является равнодействующей этой системы? - Каковы условия и уравнения равновесия плоской системы параллельных сил на плоскости? - Какое твердое тело называют рычагом? - Какое условие выполняется, когда рычаг находится в покое? - Чему равен главный вектор и главный момент произвольной плоской системы сил? - Сформулируйте три формы уравнений равновесия произвольной плоской системы сил. - Какие задачи статики называют статически определимыми и какие статически неопределимыми? - Какую из форм уравнения равновесия целесообразно использовать при определении реакций в заделке? - Какую из форм уравнения равновесия целесообразно использовать при определении реакций в опорах двухопорной балки и почему? - В чем сущность решения задач на равновесие сочлененной системы тел? - Невесомый груз нагружен силой F, как показано на рисунке. Определите (воспользовавшись, если нужно, только калькулятором), под каким углом к брусу направлена реакция шарнира А. Ответ: а)
- Чтобы определить момент силы необходимо знать: 1) силу и плечо силы; 2) плечо силы; 3) направление силы; 4) пару сил; 5) расстояние и силу.
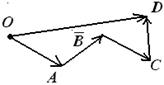
- В многоугольнике сил, какой вектор изображает равнодействующую силу
1) 2) 3) 4) 5)
- В многоугольнике сил, какой вектор изображает равнодействующую силу
1) 2) 3) 4) 5)
- При каком значении угла 1) 2) 3)
- Если проекция силы 1) 2) 3) 4) 5)
- Если проекция силы 1) 2) 3) 4) 5)
- При каком значении угла
1) 2) 3) 4) 5)
- При каком значении угла
1) 2) 3) 4) 5)
- Определить проекцию равнодействующей силы на ось y, если известны проекции каждого из слагаемых векторов: 1) 2) 3) 4)
- Определить модуль равнодействующей системы сходящихся сил, если проекции слагаемых векторов равны: 1) 2)
Поиск по сайту: |











 м.
м.







 )/4; → RВ = (
)/4; → RВ = ( 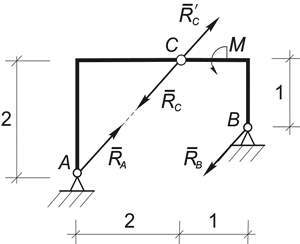
 =3кН;
=3кН;  4кН.
4кН. =40H.
=40H.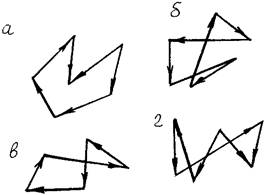


 ). Какая из сил создает больший момент относительно точки О?
). Какая из сил создает больший момент относительно точки О?
 ; б)
; б)  .
.






 между силой и осью проекция силы равна нулю?
между силой и осью проекция силы равна нулю? на ось
на ось  = 8 кН ,
= 8 кН ,  = 3 кН, то действующая сила равна:
= 3 кН, то действующая сила равна:




 =10 кН;
=10 кН; кН;
кН; кН;
кН;

 ;
;




 ;
;


 =40 H;
=40 H; =60 H;
=60 H; = -100 H;
= -100 H; = -120 H.
= -120 H. =50 H;
=50 H;