|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Условно-графические и буквенно-цифровые обозначения микросхем запоминающих устройств
Рисунок 4.11 – Условно – графические и буквенно-цифровые обозначения интегральных микросхем памяти
5 Практикум "Управляющие устройства"
Цель практикума: изучение принципов построения управляющих устройств различных типов, сравнительное исследование их преимуществ и недостатков; приобретение навыков в сборке, наладке и анализе функционирования управляющих устройств различного вида. Раздел содержит методики выполнения следующих работ: - конечный автомат с жесткой логической структурой; - микропрограммный автомат.
5.1 Практикум "Конечный автомат с жесткой логической структурой"
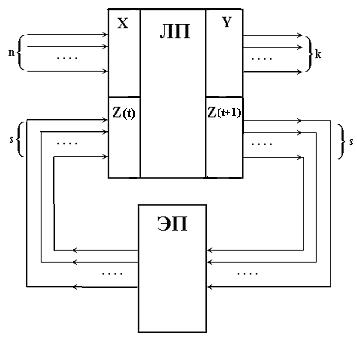
Управляющий автомат (УА) может рассматриваться как некоторое устройство, реализующее алгоритм функционирования системы управления. УА вырабатывает последовательность управляющих сигналов в соответствии с алгоритмом управления, которые воздействуют на объект управления (ОУ). При этом вырабатываемая последовательность сигналов зависит как от состояний объекта или окружающей среды, так и от состояний самого УА. Взаимосвязанные УА и ОУ образуют систему управления. В качестве системы УА-ОУ можно рассматривать, например, систему процессор-память в компьютере. Система УА-ОУ хорошо представляется в виде системы из двух автоматов - управляющего и операционного, где операционный автомат есть объект управления. Операционные автоматы могут обладать различной структурой. Например, это может быть комбинационная схема такая, как арифметико-логическое устройство либо оперативное запоминающее устройство, либо шина передачи данных и т.п. Управляющие автоматы имеют, как правило, структуру с достаточно выделенными частями - логической (комбинационной) и памятью. Простейшей моделью управляющего автомата является дискретное устройство, показанное на рисунке 5.1 с n входами, k выходами и s внутренними цепями обратных связей. Часть такого n, k - полюсника, в которой сосредоточены логические элементы, образующие однотактную схему, принято называть логическим преобразователем (ЛП). Множество ячеек памяти с соответствующими цепями обратных связей, каждая из которых имеет задержку, образуют элемент памяти (ЭП) управляющего автомата. На входы ЭП действуют сигналы, поступающие с s выделенных внутренних выходов ЛП. С выходов ЭП сигналы поступают на выделенные внутренние входы ЛП. В простейшем случае каждый ЭП может находиться в одном из двух состояний. Формальной моделью таких дискретных устройств в теории автоматов является конечный автомат.
ЛП - логический преобразователь; ЭП - элемент памяти; Х - поле входных воздействий; n = 1, 2, 3, ... - число входов; Y - поле выходных откликов; k =1, 2, 3, ... - число выходов; Z(ti+1) – выходы кодового слова перехода автомата в момент времени (ti+1); S - 1, 2, 3, ... - число внутренних связей; Z(ti) - входы кодового слова внутренних состояний автомата.
Рисунок – 5.1 Структурная схема управляющего автомата
Конечным автоматом называется устройство, определяемое конечным множеством кодовых состояний входа Р ={p1, p2,...pN}, конечным множеством кодовых состояний выхода А ={a1, a2, ...aK},конечным множеством внутренних состояний H ={h1, h2,...hS} и двумя функциями: функцией переходов и функцией выходов. Из множества внутренних состояний выделяется некоторое состояние hi, называемое начальным состоянием автомата. Предполагается, что автомат функционирует в дискретные моменты времени, т.е. непрерывная шкала времени разделена на множество интервалов (ti+1-ti), которые занумерованы целыми положительными числами Т={t0, t1, t2,.., ti,.. tm} и которые называются тактами работы автомата. В промежутках времени между тактами сохраняются неизменными все состояния автомата. В зависимости от того, чем определяется длительность такта, автоматы разделяются на два класса: синхронные и асинхронные. Синхронный автомат имеет генератор тактовых импульсов и входные сигналы могут воздействовать на автомат лишь при наличии тактового сигнала. В асинхронных автоматах длительность интервала времени, в течении которого остается неизменным состояние входа, является величиной переменной и определяется только моментами изменений входных состояний. В классе синхронных конечных автоматов рассматривают два типа автоматов: модель Мили и модель Мура. Автомат Мили описывается функцией переходов и функцией выходов:
h(ti+1) =Ф[p(ti+1), h(ti)],
Y(ti) = F[p(ti);h(ti)]
где: h(ti+1) – кодовое слово перехода автомата в новое состояние, которое зависит от внутреннего состояния автомата h(ti) непосредственно перед переходом и нового воздействия p(ti+1) в следующий момент времени
Автомат Мура отличается от автомата Мили функцией выходов, которая записывается как: Y(ti) =F[h(ti)]
Существуют различные способы задания конечных автоматов. Наиболее известные способы - это таблицы и матрицы переходов, диаграммы переходов и автоматные уравнения.
Таблицы переходов Таблицы переходов задают функцию перехода автомата. Каждый столбец таблицы соответствует внутреннему состоянию автомата, каждая строка -определенному состоянию входа. Клетка таблицы переходов соответствует состоянию автомата, определяющему внутреннее состояние, в которое автомат должен перейти в следующий момент времени. Таблица 5.1 является таблицей переходов полного синхронного автомата. Из таблицы видно, что автомат имеет четыре состояния входа p1, p2, p3, p4 и четыре внутренних состояния h1, h2, h3, h4. В каждой клетке таблицы указывается номер внутреннего состояния, в которое автомат должен перейти в следующий момент времени. Если в какой-либо клетке таблицы состояние не указано, то это состояние называется неопределенным, а такой автомат называется недоопределенным. Недоопределенные автоматы могут существовать только теоретически. Практически же любая реальная схема автомата, построенная из логических элементов, соответствует полностью определенному конечному автомату. Для задания функции выходов автомата в таблицу переходов добавляют дополнительный столбец (автомат Мили) или выходные состояния указываются дополнительно в каждой клетке таблицы (таблица 5.2).
Таблица.5.1 - Таблица переходов
Таблица 5.2 - Таблица переходов с дополнительным столбцом, указывающим функцию выхода
Таблица 5.3 - Таблица переходов с указанием в каждой ячейке таблиц функции выхода после перехода
Асинхронные автоматы тоже можно задавать с помощью таблицы переходов. Поскольку асинхронный автомат не имеет тактового входа, т.е. не подчиняется какому-то выделенному сигналу синхронизации, то его поведение всецело зависит от дисциплины изменения входных состояний. В результате чего все состояния, располагаемые в клетках таблицы переходов, разделяются на два вида: устойчивые и неустойчивые. В таблице переходов (таблица 5.4) устойчивые состояния заключены в скобки. Переход асинхронного автомата из одного устойчивого состояния в другое всегда связан с переходом его в неустойчивое состояние. При переходе автомата в неустойчивое состояние могут возникнуть гонки из-за нарушения дисциплины смены входных состояний или из-за состязаний в комбинационной схеме, что в свою очередь может привести к недетерминированному поведению автомата. Поэтому таблицу переходов (функцию переходов) необходимо строить так, чтобы не возникало гонок.
Таблица 5.4 - Таблица переходов с указанием устойчивых состояний асинхронного автомата
Матрицы переходов Матрица переходов, используемая для задания автомата, представляет собой квадратную матрицу (таблица 5.5), строки и столбцы которой соответствуют внутренним состояниям автомата. Элементы матрицы указывают состояние входа автомата, при котором он переходит из внутреннего состояния, соответствующего строке во внутреннее состояние, соответствующее столбцу, а также указывают соответствующее выходное состояние.
Таблица 5.5 - Матрица переходов автомата
Диаграммы переходов Диаграмма переходов - это ориентированный граф, вершинами которого являются внутренние состояния автомата, а дуги помечены входными и выходными состояниями, как показано на рисунке 5.2.
Рисунок 5.2 – Диаграмма переходов автомата
Автоматные уравнения
Автоматные уравнения - это примитивный способ задания автомата с помощью логических уравнений, описывающих логическую сеть, реализующую автомат на простейших логических элементах. Автоматные уравнения, называемые также функциями возбуждения автомата, являются результатом одного из этапов синтеза конечного автомата. Для несложных автоматов такой способ задания является достаточно наглядным и удобным для анализа его поведения.
Поиск по сайту: |