|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Розрахунок ємнісного датчика кута непогодження ⇐ ПредыдущаяСтр 3 из 3
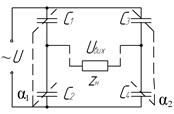
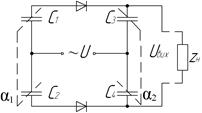
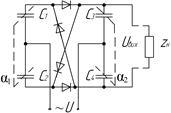
Ємнісний датчик кута непогодження складається з двох диференціальних ємнісних датчиків кутових переміщень, з’єднаних за мостовою схемою. Основні схеми вмикання датчиків наведені у табл. 4.
Таблиця 4 Cхеми вмикання ємнісних датчиків кута непогодження
Схеми № 1 і 2 застосовуються в тих випадках, коли на виході потрібно отримати змінну напругу, а схеми № 3 та 4 – постійну напругу. Схеми № 1 і 2 еквівалентні одна одній за своїми характеристиками. При узгодженому положенні осей датчика
Опори
де
Ураховуючи формулу (3.2), рівність (3.1) можна записати у вигляді
Як відомо, ємність конденсатора визначається співвідношенням
де
З метою збільшення ємності беруть конденсатори, які складаються з кількох пластин, занурених у діелектрик, із великою діелектричною проникністю. З конструктивних міркувань ємність конденсатора не може бути більшою ніж 500 пФ і на виході датчика не можна одержати значні потужності. Тому необхідно узгодити внутрішній опір датчика з опором навантаження
Чутливість моста максимальна за умови
або
При зміні кута непогодження
чи
де
При узгодженні опору навантаження з внутрішнім опором датчика у формулі для Статичні характеристики датчика кута непогодження залежать від
де Зменшення опору Розрахунок ємнісного датчика кута непогодження зводиться до вибору схеми його вмикання і розрахунку ємнісного датчика кутового переміщення. Як ємнісний датчик кутового переміщення застосовують плоский конденсатор із поворотними пластинами, оскільки вхідною величиною конденсатора є кут повороту осі. Звичайно як рухомі, так і нерухомі пластини датчика виконуються у вигляді секторів. Основними вихідними даними для розрахунку ємнісного датчика кута непогодження є: характер та величина опору навантаження Порядок розрахунку ємнісного датчика кута непогодження наступний. Виходячи із заданих умов, вибирають схему вмикання датчика. Визначають величини опорів схеми датчика за умови, що одна з осей є нерухомою Величину ємності датчика
де Урахувавши рівняння (3.4), визначають розміри пластин Розрахунок датчика кутових переміщень вважається завершеним, якщо його розраховані габаритні розміри не перевищують допустимих значень. В іншому випадку повторюють розрахунок, виходячи із заданих габаритних розмірів. Якщо виявиться, що чутливість датчика буде при цьому недостатньою, то слід збільшити частоту струму живлення. Наприкінці розрахунку датчика перевіряють значення обертального моменту, який діє на рухомі пластини.
Задача 4 Розрахувати ємнісний датчик кута непогодження, вибравши одну зі схем (табл. 4). Вихідні дані · Мінімальна чутливість датчика · Навантаження – електронний підсилювач із вхідним опором · Вихідна напруга ~ · Допустимі габаритні розміри (а×b×H) · Напруга живлення ~U, В. · Частота напруги живлення f, Гц. · Максимальний кут повороту осей Відповідні значення вихідних даних узяти з таблиці згідно з варіантом.
Завдання · Вибрати схему вмикання датчиків кута непогодження (табл. 4). · Розробити та розрахувати конструкцію датчика, виходячи із установлених габаритних розмірів. · Визначити статичну чутливість датчика кута непогодження. Відповідні значення вихідних даних узяти з таблиці 5 згідно з варіантом.
Порядок розрахунку 1. Накреслити вибрану схему вмикання датчиків. 2. Визначити величини опорів датчика за умови узгодженого навантаження
Таблиця 5 Значення вихідних даних для варіантів завдань задачі 4
3. Обчислити середню величину ємності датчика згідно з формулою (3.11)
Максимальну ємність конденсатора визначити із співвідношення
4. З формули (3.4) обчислити площу пластин
5. Визначити габаритні розміри датчика. Накреслити конструкцію датчика (див. рис. 3), показавши його дві проекції. Площа пластин такого датчика
Рис.3. Конструктивна схема ємнісного датчика
Зменшення габаритних розмірів можна досягти шляхом: – збільшення кількості пластин при зменшенні їх товщини і відстані між ними; – заміни діелектрика ( як діелектрик можна використовувати мастило ( – збільшення частоти напруги живлення. Визначити загальну висоту датчика Н, м, виходячи з його габаритних розмірів, задаючись значенням D, вибравши товщину рухомої та нерухомої пластин і відстань між ними (товщина пластин лежить у межах 0,2…1 Оскільки кожний датчик кутових переміщень зібраний за диференціальною схемою та складається з двох ємнісних датчиків, то його загальна висота H=2h повинна бути рівною
6. Знайти ємність датчика
7. Обчислити фактичний опір датчика
8. Визначити чутливість датчика до змінного опору, яка згідно зі співвідношеннями (3.8) та (3.9) дорівнює
Записати
Тоді зміна ємності буде рівною
Визначити приріст опору
де На основі формул (3.9) і (3.10) обчислити статичну чутливість датчика кута непогодження
СПИСОК ЛІТЕРАТУРИ 1. Засоби та методи вимірювань неелектричних величин: Підручник / Поліщук Є.С., Дорожовець М.М., Стадник Б.І. та ін. За ред. професора Є.С. Поліщука. – Львів: Видавництво «Бескид Біт», 2008. – 618 с. 2. Лукінюк М.В. Технологічні вимірювання та прилади: навчальний посібник. – К.: НТУУ «КПІ», 2007. – 436с. 3. Расчет измерительных и усилительных элементов автоматических систем: справочное пособие. / Чумаков Н.М., Вайнер М.Г., Панов В.И. и др. – К.: «Техніка», 1971. – 356 с. 4. Полищук Е.С., Обозовский А.Т. Электрические измерения электрических и неэлектрических величин. – К.: Вища школа, 1987. – 357 с. 5. Раннев Г.Г. Методы и средства измерений: Учебник для вузов / Г.Г. Раннев, А.П. Тарасенко. – 2-е изд., стереотип. – М.: Издательский центр «Академия», 2004. – 336 с. 6. Шикалов В.С. Технологічні вимірювання: навчальний посібник.– К.: Кондор, 2007. – 168 с. 7. Борщ В.В., Шебітченко В.Г. Методичні вказівки до виконання курсової роботи «Розрахунок мостових схем електромеханічних систем автоматики» з дисципліни « Технологічні вимірювання та прилади» напряму підготовки 6.092200 «Електромеханіка» для студентів усіх форм навчання. – Полтава: ПолтНТУ, 2009. – 26 с. Додаток А
Приклад оформлення пояснювальної записки
Міністерство освіти і науки України Полтавський національний технічний університет імені Юрія Кондратюка
Електромеханічний факультет Кафедра автоматики та електропривода
Поиск по сайту: |

 ,
,

 ;
;
 ;
;
 .
.

 міст знаходиться у рівновазі, якщо витримується рівність
міст знаходиться у рівновазі, якщо витримується рівність . (3.1)
. (3.1) , які входять у формулу (3.1), є комплексними, причому їх активні складові значно менші реактивних (ємнісних). Тому з деяким наближенням ці опори можна вважати чисто реактивними (ємнісними)
, які входять у формулу (3.1), є комплексними, причому їх активні складові значно менші реактивних (ємнісних). Тому з деяким наближенням ці опори можна вважати чисто реактивними (ємнісними) , (3.2)
, (3.2) – циклічна частота струму живлення, рад/с;
– циклічна частота струму живлення, рад/с; – ємність
– ємність  -го конденсатора, Ф.
-го конденсатора, Ф. . (3.3)
. (3.3) , (3.4)
, (3.4) – відносна діелектрична проникність діелектрика;
– відносна діелектрична проникність діелектрика; – електрична постійна;
– електрична постійна; – площа перекриття пластин, м2;
– площа перекриття пластин, м2; – відстань між пластинами, м.
– відстань між пластинами, м. . (3.5)
. (3.5) (3.6)
(3.6) . (3.7)
. (3.7) змінюються ємності. При непогодженні матимемо
змінюються ємності. При непогодженні матимемо ;
;
 ;
; ;
; ,
, ;
; . (3.8)
. (3.8) (табл. 4) необхідно підставити
(табл. 4) необхідно підставити  . При
. При 
 статична характеристика датчика
статична характеристика датчика  буде лінійною тільки при малих значеннях
буде лінійною тільки при малих значеннях  :
: , (3.9)
, (3.9) – чутливість датчика для схем № 1 і 2.
– чутливість датчика для схем № 1 і 2. веде до зниження чутливості датчика
веде до зниження чутливості датчика  і як наслідок – до нелінійності його характеристики.
і як наслідок – до нелінійності його характеристики. ; допустимі габаритні розміри кожного з датчиків кутових переміщень; параметри живлення (частота, напруга).
; допустимі габаритні розміри кожного з датчиків кутових переміщень; параметри живлення (частота, напруга). . Тому подальші розрахунки стосуються одного (першого) датчика кутових переміщень, другий датчик буде ідентичним. При визначенні опорів максимальну відносну зміну опору датчика кутових переміщень вибирають у межах
. Тому подальші розрахунки стосуються одного (першого) датчика кутових переміщень, другий датчик буде ідентичним. При визначенні опорів максимальну відносну зміну опору датчика кутових переміщень вибирають у межах  .
. при
при  легко визначити з формули (3.8)
легко визначити з формули (3.8) , (3.10)
, (3.10) – циклічна частота струму живлення, рад/с.
– циклічна частота струму живлення, рад/с. ,
,  .
. , кОм.
, кОм. .
. .
. .
. , Ом.
, Ом. , кОм
, кОм
 , В
, В
 , Гц
, Гц
 , Ф.
, Ф. , тоді
, тоді  й, отже,
й, отже, , Ф.
, Ф. при відстані між пластинами
при відстані між пластинами  ),
), ,
,  .
. , де
, де  – діаметр пластин. Узяти кількість рухомих пластин
– діаметр пластин. Узяти кількість рухомих пластин  , тоді
, тоді  , м. При значенні D, що перевищує допустимі габаритні розміри, розрахунок повторити.
, м. При значенні D, що перевищує допустимі габаритні розміри, розрахунок повторити.
 10), слюду (
10), слюду (  м.
м. м, а габаритні розміри всього диференціального датчика не мають перевищувати допустимі розміри
м, а габаритні розміри всього диференціального датчика не мають перевищувати допустимі розміри  , Ф.
, Ф. , Ом.
, Ом. .
. . Для цього спочатку виразити зміну площі перекриття пластини через кут повороту рухомих пластин
. Для цього спочатку виразити зміну площі перекриття пластини через кут повороту рухомих пластин .
. .
. ,
, – виражено в радіанах.
– виражено в радіанах. , В/рад.
, В/рад.