|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ⇐ ПредыдущаяСтр 6 из 6
В § 2.1 было сформулировано одно из важнейших понятий в теории автоматизированного электропривода: регулирование координат, осуществляемое в целях управления движением исполнительного органа. Реализация этого процесса осуществляется целенаправленным воздействием на электродвигатель с помощью системы управления СУ, содержащей в общем случае (см. рис. B.I) силовой преобразователь ПУ и устройство управления УУ. Рассмотрим, по каким принципам строятся системы управления. Всю совокупность систем управления можно разделить на неавтоматизированные и автоматизированные. Последние, в свою очередь, делятся на разомкнутые и замкнутые.
Неавтоматизированными называются системы, в которых все операции по управлению электроприводом осуществляются человеком (оператором) с помощью простейших ручных средств управления. Обычно такие системы управления используются в нерегулируемых электроприводах машин и механизмов, выполняющих простые технологические операции. Автоматизированными называются такие системы, в которых человек (оператор) дает только команду на начало и конец работы, а все остальные операции по обеспечению заданного технологического процесса обеспечиваются системой управления без участия человека. Для пояснения понятия разомкнутых систем управления обратимся к рис. 2.6, а. На рисунке приняты обозначения: ЭП – электропривод; ХВЫХ – выходная координата ЭП (показана лишь одна координата, например скорость); ХЗ–задающий сигнал (управляющее воздействие), определяющий уровень ХВЫХ; ХВОЗМ – возмущающее воздействие. Последнее в общем случае определяется различными помехами, колебаниями питающего напряжения, аварийными ситуациями и нагрузкой электропривода, которая является основным возмущающим воздействием для электропривода. Введенные понятия позволяют определить разомкнутую систему как систему, в которой изменение внешних возмущений ХВОЗМ отражается на выходной величине ХВЫХ. Другими словами, разомкнутая система не обеспечивает отстройку выходной величины от внешних возмущений, которые проявляются в изменении уровня ХВЫХ. Это является наиболее существенным недостатком разомкнутых систем, которые тем не менее из-за своей простоты нашли широкое применение в электроприводе, например для автоматизации его пуска, реверса и торможения. В отличие от разомкнутых в замкнутых системах влияние возмущающего воздействия ХВОЗМ на выходную координату ХВЫХ частично или полностью устраняется. Достигается это в системе с обратной связью (рис. 2.6, б) и в системе с компенсацией возмущающего воздействия (рис. 2.6, в), а также в комбинированной системе (рис. 2.6, г). Системы с обратной связью или, что то же самое, системы, работающие по принципу отклонения, являются основным видом замкнутых систем автоматизированного электропривода. Их характерным признаком является подача на вход электропривода сигнала обратной связи ХО,С, пропорционального выходной величине ХВЫХ. Этот сигнал сравнивается с задающим сигналом ХЗ, и результирующий сигнал Х (его называют обычно сигналом рассогласования или отклонения) является входным управляющим сигналом для электропривода. Если вследствие действия возмущения ХВОЗМ (нагрузки ЭП) выходная величина ХВЫХ (скорость ЭП) изменится, то соответствующим образом изменится и сигнал рассогласования X, а это приведет к изменению режима ЭП и восстановлению с определенной точностью прежнего уровня его скорости. Если производится регулирование нескольких координат электропривода, то в системе используется и соответствующее число обратных связей. Системы, у которых Х=0, т. е. установившееся рассогласование, обусловленное возмущающим воздействием, равно нулю, называются астатическими. Системы, у которых установившееся рассогласование не равно нулю, называются статическими. Системы со структурой, показанной на рис. 2.6, в, реализуют принцип компенсации возмущающего воздействия. Для этого входной сигнал ХВ, пропорциональный ХВОЗМ, подается в систему вместе с задающим сигналом ХЗ, в результате чего суммарный сигнал Х обеспечивает такое управление ЭП, при котором осуществляется компенсация возмущений. Такие системы используются значительно реже систем с обратными связями из-за отсутствия простых и надежных датчиков нагрузки электропривода. Кроме того, в этих системах компенсируется только одно из действующих на систему возмущений. В последнее время применение находят комбинированные системы управления (рис. 2.6, г), использующие оба принципа, но все же основную массу замкнутых систем автоматизированного электропривода составляют системы с обратными связями, которым уделяется в дальнейшем основное внимание. Все обратные связи можно разделить на положительные и отрицательные, жесткие и гибкие, линейные и нелинейные. Положительной называется такая обратная связь, сигнал которой ХО,С направлен согласно с задающим сигналом ХЗ (знак “плюс” на рис. 2.6), в то время как сигнал отрицательной обратной связи направлен навстречу сигналу задания (знак “минус” на рис. 2.6). Жесткая обратная связь характеризуется тем, что ее сигнал действует как в установившихся, так и в переходных режимах ее работы. Сигнал гибкой обратной связи вырабатывается только в переходных режимах системы и служит для формирования только динамических характеристик электропривода. Линейной называется обратная связь, которая математически описывается линейными уравнениями (алгебраическими, дифференциальными и т.д.). Все остальные связи являются нелинейными. В электроприводе для регулирования его выходных координат – скорости, ускорения, положения – обычно используются обратные связи по скорости, положению, току и напряжению всех перечисленных выше видов (обратная связь по моменту или усилию двигателя применяется редко из-за отсутствия, простых и надежных датчиков момента и усилия). При регулировании двух или нескольких координат электропривода используются три основные структурные схемы, показанные на рис. 2.7–2,9. Схема рис. 2.7, для которой использованы те же обозначения, что и для схемы рис. B.1, носит название схемы, с общим суммирующим усилителем. Электродвигатель на ней для удобства анализа представлен двумя частями – электрической ЭЧД (обмотка якоря) и механической МЧД (ротор). Электромагнитный момент двигателя, обозначенный как ХЗ, является в общем случае регулируемой координатой электропривода. Координаты Х2 и Х1 представляют соответственно скорость и положение вала двигателя.
Основным признаком схемы с общим усилителем является использование усилителя, на входы которого подается алгебраическая сумма сигналов задающего Х3 и обратных связей по всем координатам Xo,c1, Хо,с2, Хо,с3. Достоинство схемы заключается в ее простоте, недостаток – невозможность регулирования координат независимо друг от друга и, как следствие этого, трудность достижения оптимального регулирования одновременно всех координат. Развитием схемы с общим усилителем является схема рис. 2.8, где используются нелинейные обратные связи, часто называемые в теории электропривода отсечками. Реализация нелинейного характера обычно достигается за счет введения дополнительных опорных сигналов ±Xoтс1, ±Хотс2, ±Хотс3 и вентильных элементов, вследствие чего характеристика цепи обратной связи приобретает вид, показанный на рис. 2.8. В результате действие обратных связей в некотором диапазоне оказывается уже разделенным между собой, но по-прежнему невозможно осуществить независимую настройку регулирования всех координат. Указанный недостаток схем с общим усилителем устраняется при использовании так называемых систем подчиненного регулирования координат с последовательной коррекцией (рис. 2.9).
Отличительной особенностью этих систем является равенство (соответствие) количества усилителей и замкнутых контуров числу регулируемых координат. При этом замкнутые контуры располагаются таким образом, что выходной сигнал внешнего контура является задающим, входным сигналом внутреннего контура. Тем самым каждый внутренний контур оказывается подчиненным внешнему контуру, откуда и произошло название таких систем. Применительно к схеме рис. 2.9 первым контуром является контур тока и момента (координата ХЗ), который подчинен внешнему по отношению к нему контуру скорости (координате Х2), который, в свою очередь, подчинен контуру положения (координата X1).
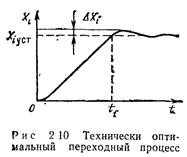
Каждый контур имеет свой усилитель – У1, У2, УЗ, которые обычно называются соответственно регуляторами положения, скорости, тока и момента. Такое построение системы позволяет осуществлять раздельное регулирование координат и раздельную (оптимальную) настройку качества процесса регулирования. Выбор типа регуляторов и расчет их параметров обычно производят таким образом, чтобы получить в динамических режимах технически оптимальный переходный процесс (настройка на технический оптимум). Такой процесс (рис. 2.10) характеризуется минимально возможным временем t1 изменения регулируемой координаты Xi, от 0 до установившегося значения Хiуст при перерегулировании Оптимальность такого переходного процесса состоит в том, что более быстрый процесс будет иметь большее перерегулирование, а при меньшем перерегулировании процесс протекает медленнее. Многие технологические процессы требуют одновременного использования нескольких рабочих, машин, которые для реализации нормального хода этих процессов должны определенным образом между собой взаимодействовать. Наилучший результат работы совокупности нескольких рабочих машин единого технологического цикла достигается при их комплексной автоматизации, когда с помощью соответствующих схем управления электроприводами обеспечивается определенная последовательность операций, автоматически избираются наилучшие (оптимальные) режимы работы машин, осуществляются необходимые блокировки и защита. В конечном итоге комплексная автоматизация технологических процессов сказывается на увеличении производительности рабочих машин и повышении качества выпускаемой продукции. Современный этап комплексной автоматизации характеризуется широким использованием средств вычислительной техники. Повышение требований к точности и быстродействию управления технологическими процессами, необходимость учета и обработки больших объемов информации о их протекании, усложнение самих законов управления делают задачу применения средств вычислительной техники крайне настоятельной. Предпосылкой для ее решения является постоянное повышение надежности и быстродействия вычислительных машин, расширение их номенклатуры и появление в том числе специализированных и управляющих вычислительных машин-микропроцессоров. Применение вычислительных машин позволяет обеспечить наилучший режим технологического процесса с учетом влияния большого числа факторов, обеспечить согласование работы отдельных частей технологического оборудования, получать, обрабатывать и выдавать всю необходимую информацию о ходе технологического процесса. Особое место при комплексной автоматизации технологических процессов занимают роботы и манипуляторы, с помощью которых может быть обеспечена связь между отдельными рабочими машинами технологического цикла и выполнение многих повторяющихся технологических операций. Эти технические устройства с успехом осуществляют транспортировку обрабатываемых изделий, выполняют различные вспомогательные операции по обработке, освобождая рабочего от однообразного и утомительного труда.
Поиск по сайту: |



 Хi=4
Хi=4  10 %.
10 %.