|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Начальными условиями для контакта «кривая на кривой» являются
- скорость, с которой точка контакта двигается вдоль одной или обеих кривых. Скорость задается в системе координат той части, которая содержит контактную кривую. Если начальное значение для скорости не задано, то ADAMS полагает его равным нулю, если это не противоречит начальным условиям на другие тела и конструкции; - начальные координаты точки контакта на одной или обеих кривых. В начальный момент времени контактные кривые могут не соприкасаться. Можно не определять некоторые или все начальные условия в кулачковом контакте. Неопределенные начальные условия ADAMS вычисляет сам, исходя из того, какие силы действуют на контактирующие части. Для изменения характеристик кулачкового контакта используют диалоговое окно, которое вызывается с помощью контекстного меню. В этом меню контакт "точка на кривой" обозначается как Point_curve: PTCV_№, контакт "Кривая на кривой" - Curve_curve:CVCV_№, где № обозначает порядковый номер контакта.
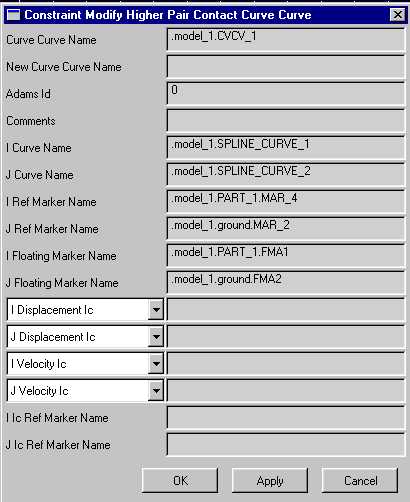
Рис. 44 Диалоговое окно для изменения свойств контакта "точка на кривой" показано на рис. 44. Значения его пунктов следующие: - Point Curve name - название контакта, - New Curve name - в этой строке можно набрать другое название для контакта, если это необходимо, - Adams Id - идентификационный номер контакта, используемый ADAMS, - Comments - строка комментариев, - Curve Name - название контактной кривой, участвующей в контакте, - I Marker Name - маркер точки контакта. Он связан с подвижной частью, - J Floating Marker Name - специальный маркер, не отображаемый на рабочей плоскости. Оси X и Y этого маркера находятся в плоскости кривой. Ось X направлена по касательной, а ось Y - по внешней нормали к кривой, - Ref Marker Name - название базового маркера контактной кривой, - Displasement Ic - начальные координаты точки контакта. Если координаты не задаются, то можно оставить это поле пустым или с помощью меню установить значение No Displacement Ic. В этом случае вместо численных значений появится слово true, - Velocity Ic - начальное значение для скорости движения точки контакта. Если начальная скорость не задается, то это поле можно оставить пустым или с помощью меню установить значение No Velocity Ic. В этом случае вместо численных значений появится слово true, - Ref Marker Ic - маркер, с которым связано положение точки контакта в начальный момент времени. По умолчанию ADAMS использует определяющий маркер части, которой принадлежит контактная кривая. Диалоговое окно изменения характеристик контакта "кривая на кривой" показано на рис. 45. Значения его пунктов аналогичны значениям пунктов в окне на рис. 44. Названия пунктов, в которых присутствует индекс I (I Marker, I Curve), относятся к кривой на подвижной части. Названия пунктов, в которых присутствует индекс J (J Marker, J Curve), относятся к кривой, связанной с кулачком.
Рис. 45
7.2. Моделирование контакта двух сфер Контакт «сфера-сфера» определяет, каким образом взаимодействуют две сферы (два эллипсоида) при взаимном столкновении. Для его создания необходимо указать две сферы, первая из которых будет называться активной (Action Body), а вторая - реактивной (Reation Body). В момент столкновения ADAMS прикладывает к каждой сфере силу, которая направлена по линии, соединяющей центры двух сфер. В центре каждой сферы создается маркер контакта. Для моделирования контакта используются два параметра: характеристика поверхности и расстояние между сферами. Характеристика поверхности определяет компоненты силы взаимодействия сфер: - жесткость - этот параметр определяет сопротивление материала проникновению вглубь поверхности. Как правило, он пропорционален глубине проникновения; - вязкое сопротивление - определяет сопротивление пропорциональное скорости проникновения. Расстояние между сферами определяет момент времени контакта. Контакт сфер моделируется с помощью встроенной процедуры ADAMSа Impact, описание параметров которой будет дано позже. Для создания контакта «сфера-сфера» необходимо: 1) выбрать значок контакта на панели или палитре упругих соединений 2) на рабочей плоскости указать сначала первую, затем вторую сферу, участвующие в контакте. Изменение характеристик контакта "сфера-сфера" осуществляется в диалоговом окне, которое вызывается с помощью контекстного меню. В этом меню контакт обозначается как Force:Sphere-Sphere_№, где № - порядковый номер контакта. Диалоговое окно для изменения характеристики контакта изображено на рис. 16. Значения его пунктов следующие: - Name - название контакта, - Direction - этот пункт определяет закон изменения силы взаимодействия между сферами. Этот пункт изменить нельзя, - Action Body - название активной сферы, - Reaction Body - название сферы реакции, - F(time,...)= - определяет изменение величины силы взаимодействия при помощи процедуры Impact. Эта процедура имеет следующие параметры: 1) расстояние между центрами сфер. Эта величина рассчитывается с помощью функции dm, аргументами которой являются два маркера, обозначающие центры сфер, 2) скорость сближения сфер. Эта величина рассчитывается с помощью функции vt, аргументы которой те же, что и у функции dm, 3) число, обозначающее расстояние между центрами сфер, на котором происходит столкновение, 4) коэффициент жесткости упругого взаимодействия, 5) коэффициент жесткости нелинейного взаимодействия, нарастающего по экспоненте, 6) коэффициент вязкого сопротивления, 7) максимальная величина проникновения одной сферы в другую. Эта величина должна быть положительной и, как правило, не превышать 10% от расстояния, на котором происходит контакт. - Force Display - определяет способ графического отображения силы взаимодействия между сферами в процессе моделирования. По умолчанию сила взаимодействия не показывается.
Рис. 46
7.3. Использование контактных сил 7.3.1. Виды контактных сил Контактные силы являются особым типом сил, которые возникают при контакте тел друг с другом или другой, заранее определенной их конфигурацией. Величины контактных сил рассчитываются на основе функции Impact, описанной в разделе «Контакт двух сфер». В ADAMS поддерживаются следующие виды контактов: - Spere-in-sphere - сфера внутри сферы, - Sphere-to-spere - сфера на сфере, - Sphere-plane - сфера на плоскости, - Circle-plane -кольцо на плоскости, - Circle-in-circle -кольцо в кольце, - Circle-to-circle -кольцо на кольце, - Point-to-curve -точка на кривой, - Circle-to-curve -кольцо на кривой, - Plane-to-curve -плоскость на кривой. Замечание. Если происходит контакт между двумя кольцами, лежащими в разных плоскостях, то эти кольца рассматриваются ADAMS как сферы.
7.3.2. Создание и изменение контактных сил Для создания контактной силы необходимо на панели или палитре сил выбрать значок Появится диалоговое окно, в котором нужно указать следующее: - Type - тип контакта - один из 9 перечисленных выше, в зависимости от типа контакта указать тела, которые участвуют в этом контакте. Если одно из тел контакта кривая, то это должен быть сплайн. Кроме того, для кривой можно изменить направление действия контактной силы; - Contact array - массив, который описывает параметры контакта (упругость, сопротивление и т.д.). Если такого массива еще нет, то необходимо создать его с помощью контекстного меню. Подробно использование контактных массивов будет рассмотрено позже; - Force display - определяет способ отображения контактной силы на экране во время моделирования. Для изменения характеристик контактной силы используется диалоговое окно, такое же, как и при создании силы. Оно вызывается с помощью контекстного меню, в котором контактная сила обозначается как Contact_force: Contact_№, где № - порядковый номер силы.
7.3.3. Использование контактных массивов Контактный массив представляет собой набор параметров, которые определяют изменение величины контактной силы со временем. Контактный массив должен быть описан для каждой контактной силы, однако несколько контактных сил могут использовать один и тоже массив. В первый раз контактный массив создается с некоторыми параметрами, принятыми по умолчанию. Позже эти параметры можно изменить. Для создания контактного массива необходимо в диалоговом окне создания (изменения) контактной силы в строке Contact Array нажать правую кнопку мыши. Появится контекстное меню, в котором нужно выбрать пункт Contact_Array, а затем Create. Появится диалоговое окно с параметрами массива. Значения пунктов этого окна такие же, как и у окна изменения массива, которое изображено на рис. 47. Для использования уже существующего массива необходимо в диалоговом окне создания (изменения) контактной силы в строке Contact Array нажать правую кнопку мыши. Появится контекстное меню, в котором нужно выбрать пункты Contact_array, затем Guesses и название нужного массива. Для изменения параметров существующего массива необходимо в диалоговом окне создания (изменения) контактной силы в строке Contact Array нажать правую кнопку мыши. Появится контекстное меню, в котором нужно выбрать название контактного массива, например .model_1.Contact_Aray_1, и в раскрывшемся меню – пункт Modify. Раскроется диалоговое окно (рис. 47), значения пунктов которого следующие:
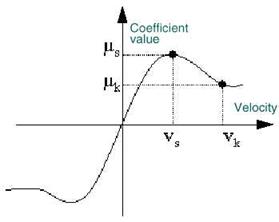
Рис. 47 - Contact Array Name - название контактного массива, - Stiffness - коэффициент упругого сопротивления (значение силы, необходимой для проникновения в контактную поверхность на единицу длины), - Force Exponent-показатель экспоненты деформационной характеристики, - Damping - коэффициент силы вязкого сопротивления проникновению одной контактирующей части в другую, - Penetration Depth - глубина проникновения, на которой достигается максимум силы вязкого сопротивления. Следующие параметры являются дополнительными и описывают трение при контакте: - Static Friction Coefficient- коэффициент статического трения. Сила статического трения считается пропорциональной нормальной силе реакции контактирующих поверхностей при скоростях меньших, чем указано в строке Slip Velocity, - Slip Velocity - максимальная скорость, при которой сила трения определяется еще в основном статическим коэффициентом, - Dynamic Friction Coefficient - коэффициент динамического трения. Сила динамического трения считается пропорциональной нормальной нагрузке при скорости в пределах от Slip VelocityдоTranslation Velocity, - Translation Velocity - значение скорости, начиная с которого трение определяется только динамическим коэффициентом. Зависимость силы трения от скорости показана на рис. 48. Видно, что при малых скоростях трение определяется в основном статическим коэффициентом и быстро растет с увеличением скорости. При больших скоростях трение определяется своим динамическим коэффициентом и практически не зависит от скорости.
Рис. 48
Поиск по сайту: |

 ,
,
 .
.