|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Загальна характеристика процесу використання мікропроцесорів та мікроЕОМ у технічних системах
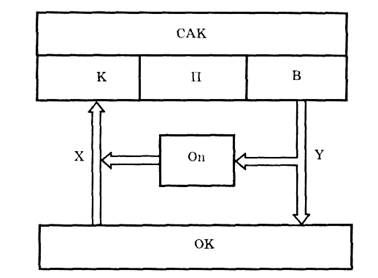
У наш час важко уявити собі галузь народного господарства, в якій не можна було б використати МП, мікро-контролер чи мікроЕОМ. Ці пристрої можуть вбудовуватись у контури керування технологічним процесом, верстати, різноманітні прилади та багато інших пристроїв і систем. Завдання створення автоматизованих систем керування технологічними процесами (АСК ТП) з використанням мікроЕОМ постають практично у всіх галузях. Перед розробниками автоматизованих систем виникають, у першу чергу, питання, яким чином реалізувати вже відомі технічні системи на надійнішій елементній базі та з більшою ефективністю. При цьому вирішується питання взаємозв'язку показників надійності систем та економічної ефективності. Широке використання МП і мікроЕОМ у системах керування виробництвом зумовлене різким зниженням їх вартості та можливістю створення на їх основі розподілених децентралізованих систем керування. Ці системи реалізуються на базі універсальних комп'ютерів з відповідним програмним забезпеченням, а також мікропроцесорних контролерів з широким діапазоном технічних характеристик. Сучасна мікропроцесорна техніка використовується для програмного керування різними виробничими об'єкта ми регулювання параметрів технологічних процесів, керування споживанням паливно-енергетичних ресурсів, у машинобудуванні, металургії та інших галузях, керування якістю продукції, контролю і діагностування технічних та інших об'єктів. Широке застосування одержали промислові роботи з вбудованими МП та мікроЕОМ для керування технологічним обладнанням. Частина систем керування виробництвом будується на принципі централізованого керування, але намагання виконувати за допомогою однієї керуючої ЕОМ велику кількість функцій виробництва не завжди має ефективний результат. До того ж відмова керуючої ЕОМ може зупинити все виробництво. Тому найбільш прийнятним є раціональне поєднання централізованих і розподілених структур керування виробництвом на базі МП та мікроЕОМ. Одними з найпростіших сучасних виробничих систем є системи автоматичного керування (САК) автономним об'єктом чи процесом (рис. 1). На вхід системи керування з об'єкта керування (ОК) поступають вхідні сигнали X, які сприймаються підсистемою К контрольної інформації згідно з алгоритмами, що зберігаються в пам'яті підсистеми перетворення П. Мета керування досягається виробленням сигналів керування ¥ та їх дією на об'єкт через виконавчу підсистему В. Керування здійснюється без участі оператора, тобто автоматично. Таке керування можливе лише для автономних об'єктів з нескладними алгоритмами керування. Прикладом такого типу САК може бути система стабілізації напруги чи частоти автономного генератора, стабілізації температури печі тощо. Для таких систем характерна спеціалізована апаратурна реалізація мікропроцесорних засобів причини низьких вимог до ємності пам'яті та інших обчислювальних ресурсів.
Рис.1. Автоматична система керування автономним об'єктом
На структурній схемі автоматизованої системи керування (АСК) автономним об'єктом (рис. 2) вектор вхідних сигналів X формується не тільки об'єктом керування, а й оператором (Оп), а виконавчі сигнали У не лише діють на об'єкт, а й забезпечують інформацією оператора. Причиною участі людини-оператора в керуванні автономним об'єктом є невивченість певних етапів технологічного процесу чи надмірна складність їх повної автоматизації. Наявність людини-оператора потребує використання спеціальних засобів відображення інформації. Характерним прикладом такої системи є АСК верстатом чи обробляючим центром. їх називають системами числового програмного керування (ЧПК). Присутність людини тут необхідна на таких етапах технологічного процесу: пошук та запуск програми, встановлення заготовки, корекція та заміна інструмента, знімання деталі, видалення стружки та ін.
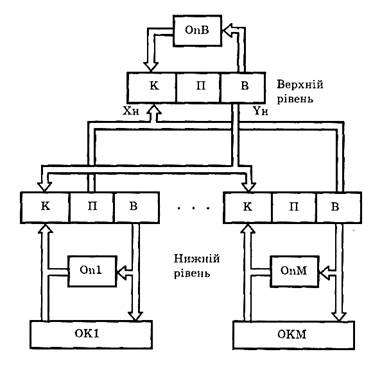
Рис. 2. Система автоматизованого керування автономним об’єктом. Для розглянутих САК і АСК автономних об'єктів характерна однорівнева структура. Сукупність підсистем К, П, В належить до одного рівня керування. Створення АСК ТП групою об'єктів зумовило появу багаторівневих систем, зокрема дворівневих (рис. 3).
Рис.3. Дворівнева автоматизована система.
Зв'язок між рівнями здійснюється, як правило, за одним із стандартних інтерфейсів за допомогою сигналів Хн і Ун. Оператори беруть участь у технологічному процесі як на верхньому (ОпВ), так і на нижньому рівні (Оп1,..., ОпМ). Дворівневі автоматизовані системи вводять в експлуатацію «знизу догори». Це дає змогу поступового введення в дію виробничої системи в міру її готовності. Наявність пам'яті на нижньому рівні визначає його автономність і адаптованість на різних стадіях поступового введення в експлуатацію. Дворівнева структура керування характерна для багатьох сучасних автоматизованих систем, зокрема гнучких виробничих систем (ГВС). Підвищення гнучкості та інтеграції виробничих систем сприяє зростанню ролі пам'яті, яка дає можливість змінювати інформацію в процесі експлуатації. Переналагодження в ГВС зводиться до заміни керуючих програм у пам'яті системи. Прикладом максимальної гнучкості та універсальності є ГВС механічної обробки деталей. З появою МП почався новий період у сфері автоматизації виробничих процесів. Майже всі аспекти створення систем керування були переглянуті. Це структура і склад технічних засобів, сукупність виконуваних функцій, їх розподіл між компонентами системи, способи надання інформації оператору-технологу, значення математичних моделей при реалізації контролю і керування та ін. У складі технічних засобів автоматизації виробничих процесів МП використовуються практично на всіх рівнях керування, починаючи від засобів збирання та первинної обробки даних — до обчислювальних комплексів і систем. При цьому істотно розширюються функціональні можливості периферійних пристроїв.
Поиск по сайту: |