Решение задачи прицеливания при стрельбе с ЛА по воздушным целям из подвижного оружия с использованием подвижного визирного устройства
Самолёты-бомбардировщики, военно-транспортные самолёты, боевые вертолеты, как правило, оснащаются оборонительным вооружением, в качестве которого используется оружие, устанавливаемое на подвижных артиллерийских установках. На этих летательных аппаратах (ЛА) визирные устройства также являются подвижными и часто располагаются относительно оружия на значительном расстоянии. Так на самолете ТУ-95 одна из пушечных установок располагается в хвостовой части самолёта, а визирное устройство стрелка, который может управлять этой установкой, установлено в передней кабине. Расстояние между пушечной установкой и визирным устройством равно примерно 40 метрам. Поэтому при решении задачи прицеливания возникает необходимость учитывать вектор выноса визирного устройства. Кроме того, при стрельбе из подвижного оружия обязателен учет бортового эффекта. Для решения задачи прицеливания составим векторную схему прицеливания (рис. 1).
В точке Ц находится цель, которая должна быть поражена из подвижного оружия ЛА. Оружие расположено в точке О,
Рис. 1
а в точке ВУ находится визирное устройство. Цель движется со скоростью , а ЛА – со скоростью . Между осью ЛА (ось x1) и скоростью имеется угол , где – углы атаки и скольжения. Ствол оружия направлен по вектору , а линия визирования на цель, т. е. по вектору дальности . Однако для поражения цели ствол оружия должен быть направлен по вектору . Векторы , - это фактическая и требуемая начальные скорости снаряда относительно ЛА. Фактический и требуемый углы разворота оружия относительно оси самолёта обозначены соответственно y и y.'Кроме того, на схеме обозначены: – вектор перемещения цели за время полёта снаряда от момента выстрела до момента попадания его в цель; – вектор перемещения снаряда в направлении требуемой абсолютной начальной скорости снаряда за время ; ξ – дальность полёта снаряда в направлении вектора за время ; - орт вектора , - вектор понижения cнаряда за время из-за действия на снаряд силы тяжести; - упрежденная дальность до цели (вектор перемещения снаряда за время ); Цу - точка, где будет цель в момент попадания в нее снаряда; - вектор выноса визирного устройства относительно оружия; - вектор отклонения снаряда от направления вектора из-за бортового эффекта, определяется по формуле:
; (1)
Так как при данном направлении ствола оружия, цель не может быть поражена, то имеется ошибка прицеливания, которую можно выразить углом
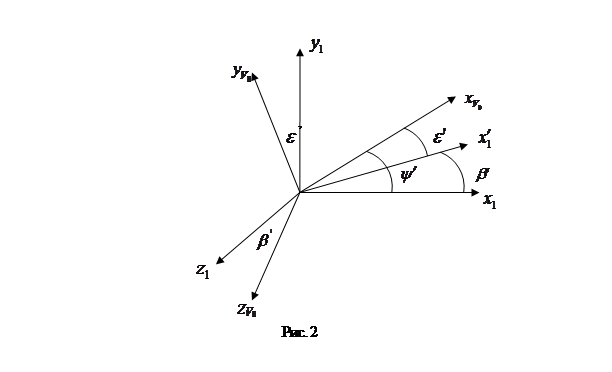
Для сведения к нулю параметра необходимо ствол оружия направить по вектору . Чтобы определить направление оружия, при котором цель будет поражена, необходимо вычислить угол . В соответствии с принятой кинематической схемой для артиллерийских установок ЛА поворот оружия осуществляется вокруг двух осей на углы и ,определяющие также ориентацию системы координат (системы “V0”) относительно системы координат (системы “1”). Порядок перехода от системы “1” к системе “V0” показан на рис. 2. Из него видно, что . Таким образом, для определения угла должны быть известны углы и . Они могут быть определены из уравнений, для составления которых используется матрица перехода или матрица . Для получения таких уравнений на основании схемы прицеливания (рис.1) составим векторное уравнение:
. (2)
Запишем формулы, по которым будем определять векторы и .
(3)
Возведя это равенство в квадрат, найдём выражение для определения модуля абсолютной начальной скорости снаряда V01:
. (4)
При определении скорости цели примем гипотезу и применим формулу
. (5)
Перепишем уравнение (2) с учетом выражений (1), (3),(5):
. (6)
Каждый вектор в этом уравнении зададим в такой системе, в которой легко находятся его проекции. Вектор зададим в системе координат (ось xDнаправлена по линии визирования); вектор - в системе координат , связанной с оружием (направление оси совпадает с направлением оружия); вектор - в скоростной системе координат ; вектор - в нормальной системе координат ; вектор - в связанной системе координат . При этом будем считать, что смещение ВУ относительно оружия имеется только по оси x1. Тогда , , , , и уравнения (6) и (4) можно записать так:
(7)
(8)
В уравнении (7) неизвестными являются скалярная величина и орт-вектор , определяемый углами и . Другие величины являются или известными или функциями, у которых аргументы кроме тоже известны. Так орт-вектор определяется углами атаки и скольжения , орт-вектор - углами тангажа и крена γ ЛА, а орт-вектор - углами поворота визирной линии по горизонту и вертикали . Величины и являются баллистическими функциями от аргументов x, с, Н, V01, (c - баллистический коэффициент снаряда, H - высота полёта). Скорость V01определяется по формуле (8). Величины V0 и с являются характеристиками оружия. Значения известных величин и аргументов функций являются или постоянными, заданными заранее, или измеряются в полёте соответствующими датчиками и устройствами.
Так как в уравнении (7) имеются три неизвестные скалярные величины , то для их определения необходимы три скалярных уравнения, которые можно получить, спроектировав векторное уравнение (7) на оси какой-либо системы координат. Для этой цели наиболее удобной является система координат OxDyDzD. Для получения системы из 3-х уравнений, необходимо умножить векторное уравнение (7) на орты , и . При этом будем учитывать, что , ,
.
После проектирования получим следующую систему уравнений:
(9)
В системе уравнений (9) смешанные векторные произведения будем определять, используя известную формулу из векторной алгебры:
. Тогда
, (10)
, (11)
. (12)
В уравнениях (9)-(12) скалярные произведения орт-векторов будем определять, используя формулу из векторной алгебры:
. (13)
Для этого необходимо векторы, входящие в скалярное произведение, задать в одной системе координат. Зададим все орт-векторы в уравнениях (9)-(12) в связанной системе координат Ox1y1z1.. Переход к этой системе производится по формуле:
, (14)
где i=D,V,V0,g.
Матрицы перехода от систем “D”, “V,” “V0,” “g” к системе “1” приведены ниже.
,
,
,
.
Так как скалярные произведения векторов в уравнениях (9)-(12) – это проекции ортов на оси координат системы “D”, то любое из этих произведений представить в следующем виде , где , а . На основании формулы (14) для i ¹ 1 можем записать:
, , (15)
где - элементы матрицы той строки, в которой стоит значение орта ; - элементы матрицы той строки, в которой стоит значение орта . Используя формулы (13), (15), можно получить следующее выражение для :
. (16)
Применим равенство (16) для определения, например, скалярного произведения . Пользуясь матрицами и , находим, что . Аналогично определяется и другие скалярные произведения векторов в уравнениях (9)-(12).Подставив найденные выражения для этих произведений в соответствующие уравнения, получим систему уравнений, из которой можно определить искомые углы и . Итоговую систему уравнений запишем в следующем виде:
(17)
Так как ни одна из неизвестных величин не может быть определена в явном виде, то система уравнений (17) решается методом итераций. Для решения этой системы требуется определить тригонометрические функции многих углов и выполнить большое количество арифметических действий. Для сокращения этих операций производят упрощения, если они незначительно влияют на точность вычисления.
Ошибка в вычислении углов и из-за неточности работы вычислительных устройств должны быть не более 5'. Но этого невозможно добиться, если для вычисления применять аналоговые вычислительные машины. Требуемую точность в вычислении углов и может обеспечить только цифровая вычислительная машина. Однако определить углы и с ошибкой не более 5' можно и с применением аналоговых вычислительных машин, если требуемое положение оружия определять не относительно оси ЛА, а относительно вектора текущей дальности цели (рис. 3).
Рис. 3
На рис. 3 обозначены: – точки, где расположены оружие, визирное устройство и цель, , – угол поворота визирной линии и требуемый угол поворота оружия относительно оси ЛА, – требуемый угол поворота оружия относительно визирной линии.
При одинаковых кинематических схемах визирного устройства и установки оружия угол поворота линии визирования в системе координат “V0” может быть представлен так: . Так как ,то . Таким образом, углы и можно определить по формулам:
, . (18)
Для этого необходимо измерить углы поворота визирной линии , и вычислить углы , , которые называются угловыми поправками воздушной стрельбы. Вычисление углов и можно производить с помощью аналоговых вычислительных машин, так как они изменяются в значительно меньших пределах, чем углы и . Следовательно, при одной и той же относительной точности вычислителя абсолютная точность вычисления углов и оказывается выше, чем точность вычисления углов и . Угловые поправки и не превышают 20° и при точности вычислителя 0,2% наибольшая ошибка определения поправок не превышает 2,4'. Ошибка в измерении углов и не превышает 2', поэтому суммарная ошибка в определении углов и будет не более 5'. При вычислении таким вычислителем непосредственно, например, угла = 300° ошибка может достигать 60'.
Формулы, по которым можно вычислять углы и можно получить следующим образом. Если во всех уравнениях системы (17) заменить величины и соответственно суммами и , то можно получить следующую систему уравнений, где неизвестными величинами являются , и :
(19)
Способ определения требуемого положения оружия по формулам (18) применяется в настоящее время на всех самолетах и вертолетах. Решение формул (18) осуществляется с помощью сельсинных связей.
Сельсин – это электрическая машина переменного тока, имеющая ротор и статор, на которых намотаны обмотки. Рассмотрим работу сельсинной связи для решения формулы . В сельсинную связь входят три сельсина (рис 4): сельсин-датчик (СД), связанный с визирным устройством; дифференциальный сельсин (ДС), связанный с вычислительным устройством и сельсин-приемник (СП), связанный с артиллерийской установкой. Роторы сельсинов СД и СП имеют однофазные обмотки, а статоры-трехфазные. У дифференциального сельсина роторные и статорные обмотки трехфазные. Ротор сельсина-датчика запитывается напряжением переменного тока. Роторы СД, ДС и СП поворачиваются соответственно на углы , , . При повороте роторов СД и ДС магнитные потоки ФСих статоров также поворачиваются на углы, равные углам поворота ротора. Таким образом, если роторы СД и ДС повернулись соответственно на углы и , то магнитный поток статорной обмотки ДС повернется на угол . На такой же угол будет повернут магнитный поток статора СП. С роторной обмотки СП будет сниматься сигнал , где - текущий угол поворота ротора СП (оружия). Если , то и . Сигнал , усиленный усилителем, поступает на мотор, который разворачивает ротор СП, а, следовательно, и оружие до тех пор, пока не наступит равенство .

 , а ЛА – со скоростью
, а ЛА – со скоростью  . Между осью ЛА (ось x1) и скоростью
. Между осью ЛА (ось x1) и скоростью  имеется угол
имеется угол  , где
, где  – углы атаки и скольжения. Ствол оружия направлен по вектору
– углы атаки и скольжения. Ствол оружия направлен по вектору  , а линия визирования на цель, т. е. по вектору дальности
, а линия визирования на цель, т. е. по вектору дальности  . Однако для поражения цели ствол оружия должен быть направлен по вектору
. Однако для поражения цели ствол оружия должен быть направлен по вектору  . Векторы
. Векторы  ,
,  - это фактическая и требуемая начальные скорости снаряда относительно ЛА. Фактический и требуемый углы разворота оружия относительно оси самолёта обозначены соответственно y и y.'Кроме того, на схеме обозначены:
- это фактическая и требуемая начальные скорости снаряда относительно ЛА. Фактический и требуемый углы разворота оружия относительно оси самолёта обозначены соответственно y и y.'Кроме того, на схеме обозначены:  – вектор перемещения цели за время полёта снаряда
– вектор перемещения цели за время полёта снаряда  от момента выстрела до момента попадания его в цель;
от момента выстрела до момента попадания его в цель;  – вектор перемещения снаряда в направлении требуемой абсолютной начальной скорости снаряда
– вектор перемещения снаряда в направлении требуемой абсолютной начальной скорости снаряда  за время
за время  - орт вектора
- орт вектора  - вектор понижения cнаряда за время
- вектор понижения cнаряда за время  - упрежденная дальность до цели (вектор перемещения снаряда за время
- упрежденная дальность до цели (вектор перемещения снаряда за время  ); Цу - точка, где будет цель в момент попадания в нее снаряда;
); Цу - точка, где будет цель в момент попадания в нее снаряда;  - вектор выноса визирного устройства относительно оружия;
- вектор выноса визирного устройства относительно оружия;  - вектор отклонения снаряда от направления вектора
- вектор отклонения снаряда от направления вектора  из-за бортового эффекта, определяется по формуле:
из-за бортового эффекта, определяется по формуле: ; (1)
; (1)
 необходимо ствол оружия направить по вектору
необходимо ствол оружия направить по вектору  . Чтобы определить направление оружия, при котором цель будет поражена, необходимо вычислить угол
. Чтобы определить направление оружия, при котором цель будет поражена, необходимо вычислить угол  . В соответствии с принятой кинематической схемой для артиллерийских установок ЛА поворот оружия осуществляется вокруг двух осей на углы
. В соответствии с принятой кинематической схемой для артиллерийских установок ЛА поворот оружия осуществляется вокруг двух осей на углы  и
и  ,определяющие также ориентацию системы координат
,определяющие также ориентацию системы координат  (системы “V0”) относительно системы координат
(системы “V0”) относительно системы координат  (системы “1”). Порядок перехода от системы “1” к системе “V0” показан на рис. 2. Из него видно, что
(системы “1”). Порядок перехода от системы “1” к системе “V0” показан на рис. 2. Из него видно, что  . Таким образом, для определения угла
. Таким образом, для определения угла  должны быть известны углы
должны быть известны углы  или матрица
или матрица  . Для получения таких уравнений на основании схемы прицеливания (рис.1) составим векторное уравнение:
. Для получения таких уравнений на основании схемы прицеливания (рис.1) составим векторное уравнение: . (2)
. (2)


 и
и  (3)
(3) . (4)
. (4) и применим формулу
и применим формулу . (5)
. (5) . (6)
. (6) зададим в системе координат
зададим в системе координат  (ось xD направлена по линии визирования); вектор
(ось xD направлена по линии визирования); вектор  - в системе координат
- в системе координат  , связанной с оружием (направление оси
, связанной с оружием (направление оси  совпадает с направлением оружия); вектор
совпадает с направлением оружия); вектор  - в скоростной системе координат
- в скоростной системе координат  ; вектор
; вектор  - в нормальной системе координат
- в нормальной системе координат  ; вектор
; вектор  - в связанной системе координат
- в связанной системе координат  . При этом будем считать, что смещение ВУ относительно оружия имеется только по оси x1. Тогда
. При этом будем считать, что смещение ВУ относительно оружия имеется только по оси x1. Тогда  ,
,  ,
,  ,
,  ,
,  и уравнения (6) и (4) можно записать так:
и уравнения (6) и (4) можно записать так: (7)
(7) (8)
(8) и орт-вектор
и орт-вектор  , определяемый углами
, определяемый углами  и
и  . Другие величины являются или известными или функциями, у которых аргументы кроме
. Другие величины являются или известными или функциями, у которых аргументы кроме  тоже известны. Так орт-вектор
тоже известны. Так орт-вектор  определяется углами атаки
определяется углами атаки  и скольжения
и скольжения  , орт-вектор
, орт-вектор  - углами тангажа
- углами тангажа  и крена γ ЛА, а орт-вектор
и крена γ ЛА, а орт-вектор  - углами поворота визирной линии по горизонту
- углами поворота визирной линии по горизонту  и вертикали
и вертикали  . Величины
. Величины  являются баллистическими функциями от аргументов x, с, Н, V01, (c - баллистический коэффициент снаряда, H - высота полёта). Скорость V01определяется по формуле (8). Величины V0 и с являются характеристиками оружия. Значения известных величин и аргументов функций
являются баллистическими функциями от аргументов x, с, Н, V01, (c - баллистический коэффициент снаряда, H - высота полёта). Скорость V01определяется по формуле (8). Величины V0 и с являются характеристиками оружия. Значения известных величин и аргументов функций  являются или постоянными, заданными заранее, или измеряются в полёте соответствующими датчиками и устройствами.
являются или постоянными, заданными заранее, или измеряются в полёте соответствующими датчиками и устройствами. и
и  . При этом будем учитывать, что
. При этом будем учитывать, что  ,
,  ,
, .
. (9)
(9) . Тогда
. Тогда , (10)
, (10) , (11)
, (11) . (12)
. (12) . (13)
. (13) , (14)
, (14)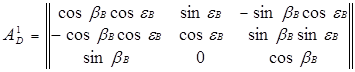 ,
, ,
, ,
, .
. на оси координат системы “D”, то любое из этих произведений представить в следующем виде
на оси координат системы “D”, то любое из этих произведений представить в следующем виде  , где
, где  , а
, а  . На основании формулы (14) для i ¹ 1 можем записать:
. На основании формулы (14) для i ¹ 1 можем записать: ,
,  , (15)
, (15) - элементы матрицы
- элементы матрицы  той строки, в которой стоит значение орта
той строки, в которой стоит значение орта  ;
;  - элементы матрицы
- элементы матрицы  той строки, в которой стоит значение орта
той строки, в которой стоит значение орта  . Используя формулы (13), (15), можно получить следующее выражение для
. Используя формулы (13), (15), можно получить следующее выражение для  :
: . (16)
. (16) . Пользуясь матрицами
. Пользуясь матрицами  и
и  . Аналогично определяется и другие скалярные произведения векторов в уравнениях (9)-(12).Подставив найденные выражения для этих произведений в соответствующие уравнения, получим систему уравнений, из которой можно определить искомые углы
. Аналогично определяется и другие скалярные произведения векторов в уравнениях (9)-(12).Подставив найденные выражения для этих произведений в соответствующие уравнения, получим систему уравнений, из которой можно определить искомые углы  и
и  . Итоговую систему уравнений запишем в следующем виде:
. Итоговую систему уравнений запишем в следующем виде: (17)
(17)
 – точки, где расположены оружие, визирное устройство и цель,
– точки, где расположены оружие, визирное устройство и цель,  ,
,  – угол поворота визирной линии и требуемый угол поворота оружия относительно оси ЛА,
– угол поворота визирной линии и требуемый угол поворота оружия относительно оси ЛА,  – требуемый угол поворота оружия относительно визирной линии.
– требуемый угол поворота оружия относительно визирной линии. . Так как
. Так как  ,то
,то  . Таким образом, углы
. Таким образом, углы  ,
,  . (18)
. (18) ,
,  и вычислить углы
и вычислить углы  ,
,  , которые называются угловыми поправками воздушной стрельбы. Вычисление углов
, которые называются угловыми поправками воздушной стрельбы. Вычисление углов  и
и  и
и  , то можно получить следующую систему уравнений, где неизвестными величинами являются
, то можно получить следующую систему уравнений, где неизвестными величинами являются  ,
,  (19)
(19) . В сельсинную связь входят три сельсина (рис 4): сельсин-датчик (СД), связанный с визирным устройством; дифференциальный сельсин (ДС), связанный с вычислительным устройством и сельсин-приемник (СП), связанный с артиллерийской установкой. Роторы сельсинов СД и СП имеют однофазные обмотки, а статоры-трехфазные. У дифференциального сельсина роторные и статорные обмотки трехфазные. Ротор сельсина-датчика запитывается напряжением переменного тока. Роторы СД, ДС и СП поворачиваются соответственно на углы
. В сельсинную связь входят три сельсина (рис 4): сельсин-датчик (СД), связанный с визирным устройством; дифференциальный сельсин (ДС), связанный с вычислительным устройством и сельсин-приемник (СП), связанный с артиллерийской установкой. Роторы сельсинов СД и СП имеют однофазные обмотки, а статоры-трехфазные. У дифференциального сельсина роторные и статорные обмотки трехфазные. Ротор сельсина-датчика запитывается напряжением переменного тока. Роторы СД, ДС и СП поворачиваются соответственно на углы  , где
, где  - текущий угол поворота ротора СП (оружия). Если
- текущий угол поворота ротора СП (оружия). Если  , то и
, то и  . Сигнал
. Сигнал  , усиленный усилителем, поступает на мотор, который разворачивает ротор СП, а, следовательно, и оружие до тех пор, пока не наступит равенство
, усиленный усилителем, поступает на мотор, который разворачивает ротор СП, а, следовательно, и оружие до тех пор, пока не наступит равенство  .
.