Для треугольного конечного элемента с шестью степенями свободыматрица жёсткости имеет размер 6х6. Её элемент является реактивным усилием в -й узловой связи, вызванным единичным перемещением -й узловой связи. На рис. 7.4 показаны положительные направления шести перемещений и шести реакций , а также реакции в связях, возникающие от горизонтальногоединичного перемещения третьего узла (перемещения по направлению пятой степени свободы). Эти реакции образуют пятый столбец матрицы Перемещения и реакции определены в местной координатной системе xy, которая назначается удобным образом.
Рис. 7.4. Узловые перемещения и опорные реакции треугольного конечного элемента плоской задачи в местной системе координат
Матрицу жёсткости можно разбить на блоки, соответствующие трём узлам КЭ:
.
Отдельный блок размером 2´2 содержит реакции в связях го узла от единичных перемещений -го узла.
Матрица симметрична относительно главной диагонали, поэтому .
В дискретной схеме конечные элементы могут ориентироваться различным образом, но для дальнейших вычислений необходима единая, общая система координат XY, в которой будутопределяться перемещения узлов (рис. 7.5). Эти перемещения обозначают буквами Z и нумеруют. Для конкретного КЭ нумерация будет начинаться с произвольного числа, на рис. 7.5 нумерацияусловно начата с единицы.
Матрицы жёсткости и их блоки, составленные в общей системе координат, обозначают буквой без штриха.
Переход от местной к общей системе координат для отдельного блока выполняют по формуле
, (7.12)
где – матрица преобразования координат для КЭ, имеющаявид
 имеет размер 6х6. Её элемент
имеет размер 6х6. Её элемент  является реактивным усилием в -й узловой связи, вызванным единичным перемещением
является реактивным усилием в -й узловой связи, вызванным единичным перемещением  -й узловой связи. На рис. 7.4 показаны положительные направления шести перемещений
-й узловой связи. На рис. 7.4 показаны положительные направления шести перемещений  и шести реакций
и шести реакций  , а также реакции в связях, возникающие от горизонтальногоединичного перемещения третьего узла (перемещения по направлению пятой степени свободы). Эти реакции
, а также реакции в связях, возникающие от горизонтальногоединичного перемещения третьего узла (перемещения по направлению пятой степени свободы). Эти реакции  образуют пятый столбец матрицы
образуют пятый столбец матрицы  Перемещения и реакции определены в местной координатной системе xy, которая назначается удобным образом.
Перемещения и реакции определены в местной координатной системе xy, которая назначается удобным образом.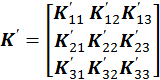 .
. размером 2´2 содержит реакции в связях
размером 2´2 содержит реакции в связях  го узла от единичных перемещений
го узла от единичных перемещений  .
. без штриха.
без штриха.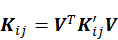 , (7.12)
, (7.12) – матрица преобразования координат для КЭ, имеющаявид
– матрица преобразования координат для КЭ, имеющаявид . (7.13)
. (7.13)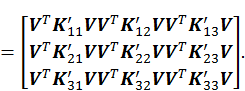 (7.14)
(7.14)