|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Уравнения вращения в векторном виде
Возникает вопрос: можно ли с помощью векторного произведения записать какое-нибудь уравнение физики? Да, конечно, с его помощью записываются очень многие уравнения. Сразу же видно, например, что момент силы равен векторному произведению радиус-вектора на силу t=rXF. (20.11) Это просто краткая запись трех уравнений: тx=yFz-zFy и т. д. С помощью того же символа можно представить момент количества движения одной частицы в виде векторного произведения вектора расстояния от начала координат (радиус-вектора) на вектор импульса L=rXp.(20.12) Векторная форма динамического закона вращения в трехмерном пространстве напоминает уравнение Ньютона F=dp/dt; именно вектор момента силы равен скорости изменения со временем вектора момента количества движения t=dL/dt. (20.13)
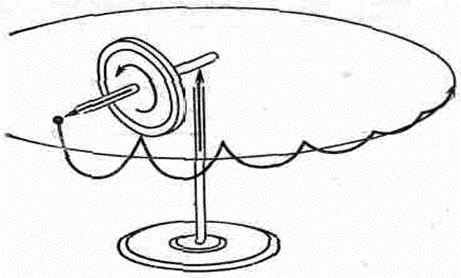
Еще одна теорема: если полный момент внешних сил равен нулю, то вектор полного момента количества движения системы остается постоянным. Эта теорема называется законом сохранения момента количества движения. Если на данную систему не действуют никакие моменты сил, то ее момент количества движения не изменяется. А что можно сказать об угловой скорости? Вектор ли она? Мы уже рассматривали вращение твердого тела вокруг некоторой фиксированной оси, а теперь давайте на минуту предположим, что оно одновременно вращается вокруг двух осей. Тело может находиться, например, в коробке и вращаться там вокруг некоторой оси, а сама коробка в свою очередь вращается вокруг какой-то другой оси. Результатом же такого сложного движения будет вращение тела вокруг некоторой новой оси. Самое удивительное здесь то, что эта новая ось может быть найдена следующим образом. Если вращение в плоскости ху представить как вектор, направленный вдоль оси z, длина которого равна скорости вращения, а в виде другого вектора, направленного вдоль оси y, изобразить скорость вращения в плоскости, то, сложив их по правилу параллелограмма, получим результат, величина которого говорит о скорости вращения тела, а направление определяет плоскость вращения. Попросту говоря, угловая скорость в самом деле есть вектор, для которого скорость вращения в трех плоскостях представляет прямоугольные проекции на эти плоскости. В качестве простого примера с использованием вектора угловой скорости подсчитаем мощность, затрачиваемую моментом сил, действующим на твердое тело. Так как мощность — это скорость изменения работы со временем, то в трехмерном пространстве она оказывается равной Р=t•w. Все формулы, которые мы писали для плоского вращения, могут быть обобщены на три измерения. Если взять, например, твердое тело, вращающееся вокруг некоторой оси с угловой скоростью w, то можно спросить: «Чему равна скорость точки с радиус-вектором r?» В качестве упражнения попытайтесь доказать, что скорость частицы твердого тела задается выражением v=wXr, где w — угловая скорость, а r — положение частицы. Другим примером векторного произведения служит формула для кориолисовой силы, которую можно записать как FK=2mvXw. Иначе говоря, если в системе координат, вращающейся со скоростью w, частица движется со скоростью v и ми все хотим описать через величины этой вращающейся системы, то необходимо добавлять еще псевдосилу fk. Гироскоп Вернемся теперь снова к закону сохранения момента количества движения. Его можно продемонстрировать с помощью быстро вращающегося колеса, или гироскопа (фиг. 20.1).
Фиг. 20.1. Быстро вращающийся гироскоп. а — ось направлена горизонтально, момент количества движения относительно вертикальной оси равен пулю; б — ось направлена вертикально, момент количества движения относительно вертикальной оси должен остаться равным нулю; человек и стул крутятся в направлении, противоположном вращению колеса.
Если стать на крутящийся стул и держать вращающееся колесо в горизонтальном положении, то его момент количества движения будет направлен горизонтально. Момент количества движения относительно вертикальной оси нельзя изменить из-за фиксированного направления оси стула (трением пренебрегаем). Если теперь повернуть ось с колесом вертикально, то колесо приобретет момент количества движения относительно вертикальной оси. Однако система в целом (колесо, вы сами и стул) не может иметь вертикальной компоненты, поэтому вы вместе со стулом должны крутиться в направлении, обратном вращению колеса, чтобы скомпенсировать его.
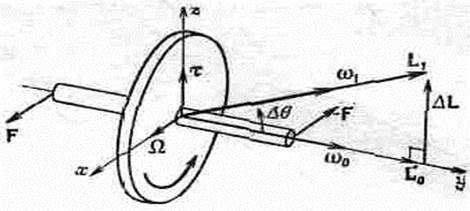
Фиг. 20.2. Гироскоп.
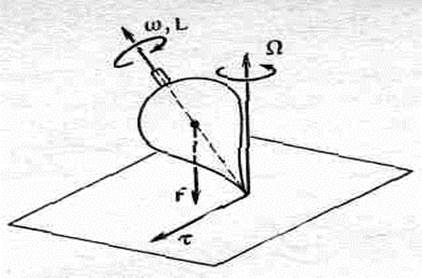
В ту же сторону направлен и момент количества движения. Предположим теперь, что мы хотим вращать колесо относительно оси х с малой угловой скоростью W; какая сила для этого требуется? Через малый промежуток времени Dt ось займет новое положение, отклонившись от горизонтального положения на угол Dq. Поскольку основная часть момента количества движения происходит от вращения колеса (медленное вращение вокруг оси х дает очень малый вклад), мы видим, что вектор момента количества движения изменяется. Каково же изменение этого вектора? Он остается тем же самым по величине, однако направление его меняется на угол Dq. Величина вектора DL поэтому равна DL=L0Dq; в результате возникает момент силы, равный скорости изменения момента количества движения t=DL/Dt=L0(Dq/Dt)=L0W. Учитывая направление различных величин, мы видим, что t=WXL0. (20.15) Таким образом, если W и l0 направлены горизонтально, как это показано на фигуре, то t направлен вертикально. Чтобы уравновесить такой момент, к концам оси в горизонтальном направлении должны быть приложены силы F и -F. Откуда берутся эти силы, кто их прикладывает? Да мы сами, собственными руками, когда стараемся повернуть ось колеса в вертикальное положение. Но Третий закон Ньютона требует, чтобы равные и противоположно направленные силы (и равный, но противоположно направленный момент) действовали на нас. Они и заставляют нас крутиться вокруг вертикальной оси z в противоположном направлении. Этот результат можно обобщить на быстро вращающийся волчок. В обычном вращающемся волчке сила тяжести, действующая на его центр масс (ц.м.), создает момент относительно точки соприкосновения волчка с полом (фиг. 20.3).
Заметьте, что направление вектора момента силы совпадает с направлением прецессии.
Этот момент действует в горизонтальном направлении и заставляет волчок прецессировать, т. е. ось его будет описывать круговой конус вокруг вертикальной оси. Если W — угловая скорость прецессии (направленная вертикально), то мы снова находим
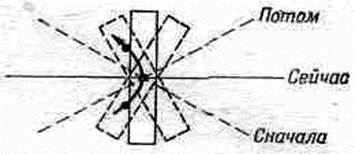
Итак, теперь мы можем утверждать, что поняли прецессию гироскопа, и математически мы действительно поняли ее. Однако вся эта математика может показаться нам в каком-то смысле «колдовством». Между прочим, по мере углубления во все более сложную физику многие простые вещи легче вывести математически, чем действительно понять их фундаментальный или простой смысл. По мере того как вы будете переходить ко все более и более современным работам по физике, то обнаружите одно странное обстоятельство: математика дает результаты, которые никто не может понять непосредственно. В качестве примера можно взять уравнение Дирака, которое получается очень просто и красиво, но понять его следствия трудновато. В нашем частном случае прецессия волчка кажется чудом, каким-то тайнодействием с прямыми углами, окружностями, крутящимися силами и правовинтовыми болтами. Но давайте все-таки попытаемся понять ее физическую сущность. Как можно объяснить этот момент сил с помощью реально действующих сил и ускорений? Заметьте, что, когда колесо прецессирует, частицы колеса в действительности не движутся уже в одной плоскости (фиг. 20.4).
Фиг. 20.4. Движение частицы вращающегося колеса, показанного на фиг. 20.2, При повороте оси эти частицы движутся по кривой линии.
Мы показали ранее (см. фиг. 19.4), что частица, которая пересекает ось прецессии, движется по кривому пути. Но для этого требуется какая-то боковая сила, которая возникает благодаря производимому нами давлению на ось колеса. Это давление по спицам передается частицам обода. «Постойте,— скажете вы,— а как относительно частиц на другой стороне колеса, которые движутся в обратном направлении?» Нетрудно догадаться, что действующие на них силы должны быть направлены в противоположную сторону, поэтому полная сила должна быть равна нулю. Таким образом, силы уравновешиваются, но одна из них приложена на одной стороне колеса, а другая — на другой. Эти силы можно было бы приложить непосредственно к колесу, однако из-за того, что колесо твердое, их можно приложить к оси, а через спицы они передаются на колесо. До сих пор мы доказали, что, если колесо прецессирует, оно может скомпенсировать моменты сил, вызванные силой притяжения или какой-то другой причиной. Однако мы только показали, что прецессия есть одно из возможных решений уравнения. Другими словами, только при том условии, что действует момент и колесо запущено правильно, мы получим чистую прецессию. Но мы не доказали (и это вообще неверно), что чистая прецессия — наиболее общее движение вращающегося тела под действием момента сил. Общее движение включает, кроме того, какие-то колебания и отклонения от главной прецессии. Эти колебания называются нутацией. Кое-кто любит говорить, что когда на гироскоп действует момент, то он поворачивается и прецессирует, что момент сил приводит к прецессии. Кажется очень странным, что, будучи запущенным, гироскоп не падает под действием силы тяжести, а движется вбок! Как это может случиться, что направленная вниз сила тяжести, которую мы хорошо знаем и чувствуем, заставляет его двигаться вбок? Ни одна из формул в мире, подобная (20.15), не скажет нам этого, потому что формула (20.15)— это особый случай, верный только тогда, когда прецессия гироскопа уже установилась. Если же говорить о деталях, то в действительности происходит следующее. Когда мы держим гироскоп за ось, так что он никак не может прецессировать (но сохраняет свое вращение), то на него не действуют никакие моменты сил, даже момент силы тяжести, поскольку своими пальцами мы компенсируем его. Но стоит только освободить ось, как в тот же момент на нее подействует момент силы тяжести. По простоте душевной каждый решит, что конец оси должен при этом падать, и он действительно начинает падать. Это можно просто видеть, если гироскоп вращается не слишком быстро.
Фиг.20.5. Истинное движение конца оси гироскопа под действием силы тяжести тотчас же после его освобождения.
Однако чем медленнее крутится колесо, тем нутация более заметна. После того как движение устанавливается, ось гироскопа оказывается несколько ниже, чем она была вначале. Почему? (Это более сложная деталь, и мы упоминаем о ней только для того, чтобы не оставлять у читателя впечатления, что гироскоп — это чудо. Он действительно удивительная штука, но все же не чудо.) Если мы держали ось абсолютно горизонтально, а затем внезапно отпустили ее, то с помощью уравнения прецессии мы можем установить, что ось начинает прецессировать, т. е. двигаться по кругу в горизонтальной плоскости. Но это невозможно! Хотя мы и не обращали на это внимания раньше, колесо обладает каким-то моментом инерции относительно прецессирующей оси, и если оно даже медленно вращается вокруг этой оси, то оно имеет слабый момент количества движения. Отчего это происходит? Ведь если опора идеальная (т. е. если нет никакого трения), то относительно вертикальной оси никакого момента сил не может возникнуть. Тогда каким же образом прецессия все же возникает, если нет никаких моментов? Ответ: движение по циклоиде конца оси стремится к среднему стационарному движению, которое эквивалентно движению центра катящегося колеса, т. е. он устанавливается несколько ниже горизонтали. По этой причине собственный угловой момент гироскопа имеет небольшую вертикальную компоненту, которая в точности компенсирует момент количества движения прецессии. Как видите, ось должна немного опуститься, немного поддаться силе тяжести, чтобы иметь возможность крутиться вокруг вертикальной оси. Так работает гироскоп,
Поиск по сайту: |