|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Элементы векторной алгебрыСтр 1 из 2Следующая ⇒
Лекция 1. Введение. Основные понятия статики. В данной лекции рассматриваются следующие вопросы 1. Введение. 2. Элементы векторной алгебры. 3. Основные понятия статики. 4. Аксиомы статики. 5. Связи и их реакции. Изучение этих вопросов необходимо в дальнейшем для изучения центра тяжести, произвольной пространственной системы сил, сил трения скольжения, моментов трения качения, решения задач в дисциплине «Сопротивление материалов». Введение Развитие современной техники ставит перед инженерами самые разнообразные задачи, связанные с расчетом различных сооружений (зданий, мостов, каналов, плотин и т. п.), с проектированием, производством и эксплуатацией всевозможных машин, механизмов, двигателей и, в частности, таких объектов, как автомобили, тепловозы, морские и речные суда, самолеты, ракеты, космические корабли и т. п. Несмотря на многообразие всех этих проблем, решения их в определенной части основываются на некоторых общих принципах и имеют общую научную базу. Объясняется это тем, что в названных задачах значительное место занимают вопросы, требующие изучения законов движения или равновесия тех или иных материальных тел. Наука об общих законах движения и равновесия материальных тел и о возникающих при этом взаимодействиях между телами называется теоретической механикой. Теоретическая механика представляет собой одну из научных основ современных технических дисциплин. Механикой в широком смысле этого слова называется наука, посвященная решению любых задач, связанных с изучением движения или равновесия тех или иных материальных тел и происходящих при этом взаимодействий между телами. В качестве материальных объектов помимо дискретных тел могут выступать среды – например, жидкость или газ и поля, поэтому круг объектов, изучаемых механикой очень широк. В зависимости от физических свойств этих объектов и их размеров всю механику можно разделить на классическую или ньютонову и неклассическую. Неклассическая механика - это действительно часть физики, в которой исследуются объекты микро- и макромира с учетом пространственно-временной зависимости. Классическая механика имеет дело с объектами, протяженность которых приблизительно и с точностью до нескольких порядков заключена в интервале от 10-10 до 1010 метра. При их изучении свойства пространства и времени можно считать постоянными. Именно такую ньютонову механику мы и будем рассматривать в дальнейшем. В зависимости от особенностей модели реальных объектов классическая механика делится на теоретическую механику - с моделью абсолютно твердого тела и механику сплошной среды с моделью деформируемого тела. Основным методом исследования в механике является гипотетико-дедуктивный. Его суть заключается в выдвижении гипотезы, которая подтверждается или опровергается опытом. Схематически место механики в системе естествознания можно определить так, как показано на рисунке ниже. При этом механика деформируемого тела или механика сплошной среды, образующая ядро этой науки, окружена тремя сегментами, представляющими собой теоретическую механику, неклассическую механику микро- и макромира и прикладную механику, которые примыкают соответственно: к математике, физике и практике в широком смысле этого слова. Под прикладной механикой понимают раздел механики, в котором ее выводы и методы применяют для решения задач проектирования, строительства и эксплуатации сооружений. Этот термин близок к понятиям «техническая» или «строительная» механика.
Теоретическая механика представляет собою часть механики, в которой изучаются общие законы движения и взаимодействия материальных тел, т.е. те законы, которые, например, справедливы и для движения Земли вокруг Солнца и для полета ракеты или артиллерийского снаряда и т. п. Под движением в механике мы понимаем механическое движение, т.е. происходящее с течением времени изменение взаимного положения материальных тел в пространстве. Механическим взаимодействием между телами называется тот вид взаимодействия, в результате которого происходит изменение движения этих тел или изменение их формы (деформация). Величина, являющаяся количественной мерой механического взаимодействия тел, называется в механике силой. Основной задачей теоретической механики является изучение общих законов движения и равновесия материальных тел под действием приложенных к ним сил. По характеру рассматриваемых задач теоретическую механику принято разделять на статику, кинематику и динамику. Статикарассматривает частный случай механического движения, когда оно не зависит от времени – речь идет о рассмотрении равновесия твердого тела, загруженного системой сил и находящегося в состоянии покоя. Кинематикарассматривает внешнюю сторону механического движения независимо от причин, вызвавших его. Это не что иное, как геометрия в четырехмерном пространстве, где время играет роль четвертого измерения. Если известно положение движущейся точки в каждый момент времени, то кинематика позволяет построить ее траекторию и определить такие кинематические параметры, как скорость или ускорение. Динамикаисследует общий случай механического движения твердого тела с учетом причин, вызвавших его. Термин «механика» впервые появляется в сочинениях одного из выдающихся философов древности Аристотеля (384—322 до н. э.) и происходит от греческого слова μηχαυή, означающего по современным понятиям «сооружение», «машина», «изобретение» В древние времена, когда запросы производства сводились главным образом к удовлетворению нужд строительной техники, начинает развиваться учение о так называемых простейших машинах (блок, ворот, рычаг, наклонная плоскость) и общее учение о равновесии тел (статика). Обоснование начал статики содержится уже в сочинения одного из великих ученых Архимеда (287 – 212 г. но н. э.). В России на развитие первых исследований по механике большое влияние оказали труды гениального ученого и мыслителя М. В. Ломоносова (1711—1765). Из многочисленных отечественных ученых, внесших значительный вклад в развитие различных областей теоретической механики, прежде всего, должны быть названы: М. В. Остроградский (1801—1861), которому принадлежит ряд важных исследований по аналитическим методам решения задач механики; П. Л. Чебышев (1821—1894), создавший новое направление в исследовании движения механизмов; С. В. Ковалевская (1850—1891), решившая одну из труднейших задач динамики твердого тела; И. В. Мещерский (1859—1935), заложивший основы механики тел переменной массы; К. Э. Циолковский (1857—1935), сделавший ряд фундаментальных открытий в теории реактивного движения; А. Н. Крылов (1863—1945), разработавший теорию корабля и много внесший в развитие теории гироскопических приборов. Выдающееся значение для развития механики имели труды «отца русской авиации» Н. Е. Жуковского (1847—1921) и его ближайшего ученика С. А. Чаплыгина (1869—1942). Характерной чертой в творчестве Н. Е. Жуковского было приложение методов механики к решению актуальных технических задач. Большое влияние идеи Н. Е. Жуковского оказали и на преподавание теоретической механики в высших технических учебных заведениях нашей страны. Стоящая в наши дни перед отечественной наукой и техникой задача непрерывного роста и внедрения в производство новой техники требует дальнейшего повышения качества подготовки инженерных кадров, расширения теоретической базы их знаний. Известную роль в решении этой задачи должно сыграть и изучение одной из научных основ современной техники – теоретической механики.
Элементы векторной алгебры В теоретической механике рассматриваются такие векторные величины как сила, моменты силы относительно точки и оси, момент пары сил, скорость, ускорение и другие. 1. Понятие вектора. Для определенности рассматриваем прямоугольную декартову систему координат. Вектор- это направленный отрезок, который характеризуется длиной и направлением. Операции над векторами. Вектора можно складывать и умножать на число.
α∙
Рис.1
В математике все вектора являются свободными, их можно переносить параллельно самим себе. В сумме двух векторов (рис.1,а) начало второго вектора можно поместить в конец первого вектора, тогда сумму двух векторов можно представить как вектор, имеющий начало в начале первого вектора, а конец в конце второго вектора. Применяя это правило для суммы нескольких векторов (рис.1,б) получаем, что суммой нескольких векторов является вектор замыкающий ломаную линию, состоящую из слагаемых векторов. Операции над векторами подчиняются следующим законам (см. рис.2):
Рис.2
2. Правые и левые системы координат. Декартовы системы координат делятся на два вида: правую и левую. Рассмотрим декартовы системы координат на плоскости (см. рис. 3). При повороте оси Ox правой системы координат на 90о против часовой стрелки она совпадает с осью Oy .
Рис.3 Рис.4
Рассмотрим декартовы системы координат в пространстве (см. рис.4). При повороте оси Ox правой системы координат вокруг оси Oz на 900 против часовой стрелки она совпадает с осью Oy . 3. Длина, проекции и направляющие косинусы вектора. В дальнейшем будем рассматривать правую декартову систему координат. Единичные вектора вдоль осей Ox, Oy и Oz образуют систему единичных (или базисных) векторов. Любой вектор, имеющий начало в точке O, можно представить как сумму
Рис.5
Длина (или модуль) вектора Проекцией вектора на ось называется скалярная величина, которая определяется отрезком, отсекаемым перпендикулярами, опущенными из начала и конца вектора на эту ось. Проекция вектора считается положительной (+), если направление ее совпадает с положительным направлением оси, и отрицательной (-), если проекция направлена в противоположную сторону (см. рис.6).
Рис.6
Направляющими косинусами
Любая точка пространства с координатами (x, y, z) может быть задана своим радиус-вектором
Координаты (x, y, z) это проекции вектора 4. Скалярное произведение двух векторов Имеется два вектора
Рис.7
Результатом скалярного произведения двух векторов Записывается как Свойства скалярного произведения:
5. Векторное произведение двух векторов Имеется два вектора
Рис.8
Результатом векторного произведения двух векторов Векторное произведение двух векторов это вектор Длина (или модуль) векторного произведения равна | Свойства векторного произведения:
Векторное произведение двух векторов вычисляется через их проекции следующим образом:
Основные понятия статики Статикой называется раздел механики, в котором излагается общее учение о силах и изучается условия равновесия материальных тел, находящихся под действием сил. Твердое тело. В статике и вообще в теоретической механике все тела считаются абсолютно твердыми. То есть предполагается, что эти тела не деформируются, не изменяют свою форму и объем, какое бы действие на них не было оказано. Материальной точкой будет называться абсолютно твердое тело, размерами которого можно пренебречь. Исследованием движения нетвердых тел – упругих, пластичных, жидких, газообразных, занимаются другие науки (сопротивление материалов, теория упругости, гидродинамика и т.д.). Под равновесием будем понимать состояния покоя тела по отношению к другим материальным телам. Основные понятия: 1. Величина, являющаяся количественной мерой механического взаимодействия материальных тел, называется в механике силой. В Международной системе единиц (СИ) силу измеряют в ньютонах (Н), килоньютонах (кН). Сила является величиной векторной. Ее действие на тело определяется: 1) численной величиной или модулем силы, 2) направлением силы, 3) точкой приложения силы (рис.9). Например, будем прикладывать к стулу одну и ту же по модулю силу F. При приложении силы сверху вниз стул остается в состоянии покоя; при положении силы снизу вверх - стул поднимается; изменим направление нагружения, приложим силу горизонтально к спинке стула - стул опрокинется. Так как во всех случаях направление и место приложения силы различны, то и результат действия силы на стул разный, несмотря на то, что модуль силы F во всех случаях одинаков.
Рис.9
Силу, как и другие векторные величины, изображают в виде направленного отрезка со стрелкой на конце, указывающей его направление. Прямая DE, вдоль которой направлена сила, называется линией действия силы. Понятия «линия действия» и «направление» близки, но не тождественны. Очевидно, что по линии действия можно определить направление с точностью до противоположного. Аналогично связаны понятия «модуль» и «величина» для вектора. В тексте вектор силы обозначается латинскими буквами
2. Совокупность сил, действующих на какое-нибудь твердое тело, будем называть системой сил. 3. Тело, не скрепленное с другими телами, которому из данного положения можно сообщить любое перемещение в пространстве, называется свободным. 4. Если одну систему сил, действующих на свободное твердое тело, можно заменить другой системой, не изменяя при этом состояния покоя или движения, в котором находится тело, то такие две системы сил называются эквивалентными. Например, если системы сил, изображенных на рис. 9.1, а и рис. 9.1, б, уравновешены, то эти две системы сил будут эквивалентны друг другу.
Рис.9.1. Система сил: а – заданная система сил; б – эквивалентная система сил
5. Система сил, под действием которой свободное твердое тело может находиться в покое, называется уравновешеннойили эквивалентной нулю. 6. Если данная система сил эквивалентна одной силе, то эта сила называется равнодействующей данной системы сил. Таким образом, равнодействующая - это сила, которая одна заменяет действие данной системы сил на твердое тело. Так как система сил F1 и F2 эквивалентна одной силе R (рис. 9.1, б), то сила R называется равнодействующей данной системы сил. Силы F1 и F2 в свою очередь могут называться составляющими силы R. 7. Сила, равная равнодействующей по модулю, прямо противоположная ей по направлению и действующая вдоль той же прямой, называется уравновешивающей силой. 8. Силы, действующие на твердое тело, можно разделить на внешние и внутренние. Внешними называются силы, действующие на частицы данного тела со стороны других материальных тел. Внутренними называются силы, с которыми частицы данного тела действуют друг на друга. 9. Сила, приложенная к телу в какой-нибудь одной его точке, называется сосредоточенной. Силы, действующие на все точки данного объема или данной части поверхности тела, называются распределенными. Понятие о сосредоточенной силе является условным, так как практически приложить силу к телу в одной точке нельзя. Силы, которые мы в механике рассматриваем как сосредоточенные, представляют собою по существу равнодействующие некоторых систем распределенных сил. В частности, обычно рассматриваемая в механике сила тяжести, действующая на данное твердое тело, представляет собою равнодействующую сил тяжести его частиц. Линия действия этой равнодействующей проходит через точку, называемую центром тяжести тела. Аксиомы статики. Все теоремы и уравнения статики выводятся из нескольких исходных положений, принимаемых без математических доказательств и называемых аксиомами или принципами статики. Аксиомы статики представляют собою результат обобщений многочисленных опытов и наблюдений над равновесием и движением тел, неоднократно подтвержденных практикой. Часть из этих аксиом является следствиями основных законов механики, с которыми мы познакомимся в динамике. Аксиома 1. Если на свободное абсолютно твердое тело действуют две силы, то тело может находиться в равновесии тогда и только тогда, когда эти силы равны по модулю (F1 = F2) и направлены вдоль одной прямой в противоположные стороны (рис. 10).
Рис.10
Аксиома 1 определяет простейшую уравновешенную систему сил, так как опыт показывает, что свободное тело, на которое действует только одна сила, находиться в равновесии не может. Аксиома 2. Действие данной системы сил на абсолютно твердое тело не изменится, если к ней прибавить или от нее отнять уравновешенную систему сил. Эта аксиома устанавливает, что две системы сил, отличающиеся на уравновешенную систему, эквивалентны друг другу. Следствие из 1-й и 2-й аксиом. Действие силы на абсолютно твердое тело не изменится, если перенести точку приложения силы вдоль ее линии действия в любую другую точку тела.
Рис.11
В самом деле, пусть на твердое тело действует приложенная в точке А сила Таким образом, вектор, изображающий силу Аксиома 3 (аксиома параллелограмма сил). Две силы, приложенные к телу в одной точке, имеют равнодействующую, приложенную в той же точке и изображаемую диагональю параллелограмма, построенного на этих силах, как на сторонах. Вектор
Рис.12 Величина равнодействующей
 . .
Конечно, Следовательно, аксиому 3 можно еще формулировать так: две силы, приложенные к телу в одной точке, имеют равнодействующую, равную геометрической (векторной) сумме этих сил и приложенную в той же точке. Аксиома 4 (принцип противодействия). При всяком действии одного материального тела на другое имеет место такое же по величине, но противоположное по направлению противодействие. Закон о равенстве действия и противодействия является одним из основных законов механики. Из него следует, что если тело А действует на тело В с силой
Рис.13
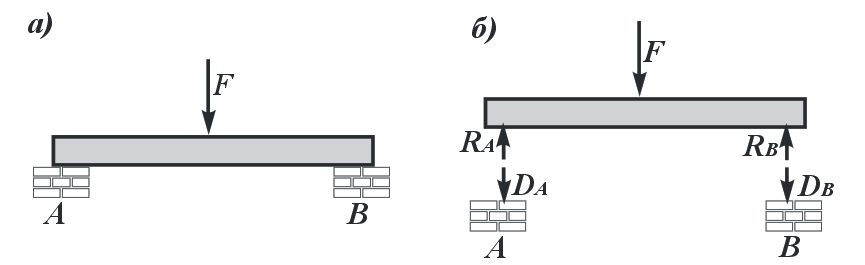
Этот принцип утверждает, что в природе не существует односторонних явлений. На рис. 13.1 изображена балка, опирающаяся на стены концами А и В. Для выявления сил действия и противодействия отделим балку от стен. Тогда силы действия балки на стену выражаются силами DA и DB, приложенными к стенам, а силы противодействия - силами RA и RB, приложенными к балке, которые в дальнейшем будем называть реакциями. . Рис. 13.1. Опирание балки на опоры: а – схема загружения балки; б – силы действия балки на опоры и противодействия со стороны опор на балку Аксиома 5 (принцип отвердевания). Равновесие изменяемого (деформируемого) тела, находящегося под действием данной системы сил, не нарушится, если тело считать отвердевшим (абсолютно твердым). Из принципа отвердения следует, что условия, необходимые и достаточные для равновесия абсолютно твердого тела, необходимы, но не достаточны для равновесия деформируемого тела, по форме и размерам тождественного с данным. Высказанное в этой аксиоме утверждение очевидно. Например, ясно, что равновесие цепи не нарушится, если ее звенья считать сваренными друг с другом и т. д. Аксиома 6 (аксиома связей).Всякое несвободное тело можно рассматривать как свободное, если механическое действие связей заменить реакциями этих связей (пояснения к этой аксиоме в следующем параграфе). Приведенные принципы и аксиомы положены в основу методов решения задач статики. Все они широко используются в инженерных расчетах.
Связи и их реакции. По определению, тело, которое не скреплено с другими телами и может совершать из данного положения любые перемещения в пространстве, называется свободным(например, воздушный шар в воздухе). Тело, перемещениям которого в пространстве препятствуют какие-нибудь другие, скрепленные или соприкасающиеся с ним тела, называется несвободным. Все то, что ограничивает перемещения данного тела в пространстве, будем называть связью. Например, тело лежащее на столе – несвободное тело. Связью его является плоскость стола, которая препятствует перемещению тела вниз. Очень важен так называемый принцип освобождаемости, которым будем пользоваться в дальнейшем. Записывается он так.
Поиск по сайту: |

 - сумма двух векторов есть вектор
- сумма двух векторов есть вектор - произведение вектора на действительное число есть вектор
- произведение вектора на действительное число есть вектор - существует нулевой вектор
- существует нулевой вектор






 , числа (ax, ay, az) - это проекции вектора
, числа (ax, ay, az) - это проекции вектора  на оси координат (см. рис.5).
на оси координат (см. рис.5).
 и обозначается a или |
и обозначается a или | 
 вектора называются косинусы углов между вектором и положительными направлениями осей Ox, Oy и Oz соответственно.
вектора называются косинусы углов между вектором и положительными направлениями осей Ox, Oy и Oz соответственно.

 на оси координат.
на оси координат. .
. ,
, .
.
 или (
или ( 





 .
.
 .
.
 . Записывается как
. Записывается как  или [
или [  .].
.]. был виден против часовой стрелки.
был виден против часовой стрелки. .
.








 и др., с черточками над ними. Если черточки нет, значит у силы известна только ее численная величина - модуль.
и др., с черточками над ними. Если черточки нет, значит у силы известна только ее численная величина - модуль.


 (рис.11). Возьмем на линии действия этой силы произвольную точку В и приложим к ней две уравновешенные силы
(рис.11). Возьмем на линии действия этой силы произвольную точку В и приложим к ней две уравновешенные силы  и
и  , такие, что
, такие, что  ,
,  . От этого действие силы
. От этого действие силы  , равный диагонали параллелограмма, построенного на векторах
, равный диагонали параллелограмма, построенного на векторах  .
.
 Такое равенство будет соблюдаться только при условии, что эти силы направлены по одной прямой в одну сторону. Если же векторы сил окажутся перпендикулярными, то
Такое равенство будет соблюдаться только при условии, что эти силы направлены по одной прямой в одну сторону. Если же векторы сил окажутся перпендикулярными, то 
 (рис. 13). Однако силы
(рис. 13). Однако силы  не образуют уравновешенной системы сил, так как они приложены к разным телам. Эта аксиома соответствует третьему закону Ньютона: действие всегда равно и противоположно противодействию. При этом необходимо помнить, что в аксиоме 4 рассматривается случай, когда силы приложены к разным телам и в этом случае система сил не является уравновешенной в отличие от случая действия сил в аксиоме 2.
не образуют уравновешенной системы сил, так как они приложены к разным телам. Эта аксиома соответствует третьему закону Ньютона: действие всегда равно и противоположно противодействию. При этом необходимо помнить, что в аксиоме 4 рассматривается случай, когда силы приложены к разным телам и в этом случае система сил не является уравновешенной в отличие от случая действия сил в аксиоме 2.