|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
И угловыми характеристиками
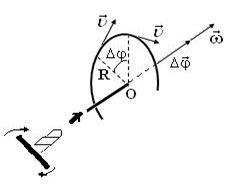
Движение точки по дуге окружности радиуса R называется вра- щательным движением рис (4.1). Линия перпендикулярная плоскости вращения (плоскости в которой лежит траектория) и проходящая через центр окружности (точка О) называется осью вращения. Изменение по- ложения точки при вращательном движении характеризуют углом пово- рота Dj радиуса кривизны траектории (измеряют в радианах).
Направление поступатель- ного движения Рис.4.1
Угол поворота удобно представить в виде вектора Dj : вектор
Dj численно равен углу поворота Dj и направлен вдоль оси вращения согласно правилу правого винта. При вращении правого винта (буравчи- ка) по направлению вращения, направление поступательного движения
буравчика “показывает” направление вектора Dj Угловая скорость вращения равна первой производной от угла поворота :
  
r dj dj
   
dt dt Вектор w направлен так же, как и вектор dj (т.е. Dj при Dt®0) (уравнение (4.1), рис. 4.1). Вращение с постоянной угловой скоростью называется равномерным. В этом случае:
ω = , (4.2) где j - угол поворота за время t. Равномерное вращательное движение характеризуют периодом вращения Т - это время одного оборота (т.е. время поворота радиуса вра- щения на угол 2p). Из (4.2) получим для равномерного вращательного движения (взяв t = T и, соответственно, j = 2p )
ω = (4.3) Число оборотов в единицу времени n равно: . (4.4) (Понятие периода Т и числа оборотов n можно использовать и для нерав- номерного вращательного движения, принимая за эти величины те значе- ния, которые имела бы точка, если бы она вращалась равномерно с дан- ным значением мгновенной скорости). Из (4.1) , (4.2) и определений Т и n следует: [w]=рад/с=1/с=с-1 [T]=c; [n]=обороты/с=1/с=с-1
Вектор w может меняться как вследствие изменения скорости вращения вокруг оси (т.е. изменяется величина w), так и вследствие пово-
рота оси вращения (т.е. меняется направление вектора w ). Пусть за время
Dt вектор w изменился на Dw . Угловое ускорение b равно:
r r r
 
(4.5) dt2 Угловое ускорение есть первая производная от угловой скорости или вторая производная от угла поворота по времени Если ось вращения не
меняет своего направления, то изменения w зависит только от изменения его величины Следовательно, для неизменного направления оси вращения из (4.5) получим:
dω d j
 
dt dt2
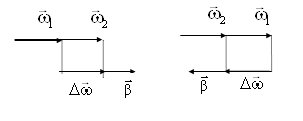
В этом случае, при увеличении величины w вектор Dw совпадает с век-
тором w (рис 4.2), при уменьшении – противоположен (рис. 4.3).
Рис.4.2 Рис.4.3 r Из сказанного и уравнения (4.5) следует: направление вектора b совпа-
дает с направлением вектора w при ускоренном вращении, и противопо-
ложно направлению w при замедленном.
ds
           
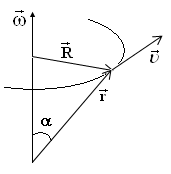
Найдем связь линейных характеристик движения (u, a, an , at ) с угловыми (w, b). Из рис.4.4 видно: dS dj d S = dj×R ⇒ dt = dt R ⇒ u=wR . (4.7) (Учитывая правило векторного произведения можно записать (рис.4.4а):
r r r тор u перпендикулярен w и r т.е. пер- пендикулярен R ). Т.к. an = ⇒ то, учитывая (4.7), полу- чим: an = = ⇒ Рис.4.4а an= w R . (4.8) Если ось вращения не меняет своего положения в пространстве, то (с уче- том (4.7)):
 
Если при этом R = const , то получим : b = × ⇒ b = ⇒
   
aτ = β × R Из (3.8) , (4.8) и (4.9) находим: a = (ω2 × R)2 + (β × R)2 = R ω4 + β2 Пример: равноускоренное вращательное движение по окружности радиу- са R: b=const⇒ at=bR=const
Из (4.6): dω = β × dt ⇒ dω = β × dt ⇒ ω0 0 w-w0=bt w=w0+ bt; (см. 3.10). (4.10) j
dj = ω × dt ⇒ = + β × t)dt ⇒
j0 0

j -j0 = ω0t +

(см. 3.11 и 3.12).
∆j = ω0t +
Т.к.
S = ∆j × R ⇒ = ω0t + ⇒ S = ω0Rt + , wR=u0, bR= at ⇒ aτ ×t2 S = u0t + (см. 3.11 и 3.12). (4.12)
Глава 2. Динамика
Поиск по сайту: |