|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Кутова швидкість і кутове прискорення тіла
Проведемо через вісь обертання Az тіла (рис. 2.2) дві півплощини: півплощину П, незмінно зв'язану з тілом і обертову разом з ним, та нерухому в просторі півплощину П0. Тоді положення тіла в будь-який момент часу визначається узятим з відповідним знаком кутом Щоб знати положення тіла в будь-який момент часу, треба знати залежність кута
Рівняння (2.3) виражає закон обертального руху твердого тіла навколо нерухомої осі. Основними кінематичними характеристиками обертального руху твердого тіла є його кутова швидкість Кутова швидкість характеризує зміну з часом кута повороту тіла, а її числове (алгебраїчне) значення дорівнює першій похідній від кута повороту за часом: Знак У техніці кутову швидкість часто визначають числом обертів за хвилину, зазначаючи цю величину через п об/хв. Оскільки за один оберт тіло повертається на кут
Усі параметри кутової швидкості тіла можна відобразити у вигляді вектора Кутове прискорення характеризує зміну з часом кутової швидкості тіла, а його числове (алгебраїчне) значення дорівнює першій похідній від кутової швидкості або другій похідній від кута повороту тіла за часом:
Розмірність кутового прискорення 1- рад/с2.
При збіжності знаків
Коли тіло обертається прискорено, то величини Якщо кутова швидкість тіла залишається за весь час руху постійною ( Інтегруючи рівність Якщо кутове прискорення тіла за весь час руху залишається постійним ( Інтегруючи рівність
Представляючи цей вираз як
Поиск по сайту: |
 між цими півплощинами, що називається кутом повороту тіла. Кут вважається додатним, якщо він відлічений від нерухомої півплощини в напряму проти ходу годинникової стрілки (для спостерігача, що дивиться з позитивного кінця осі Az),і від’ємним, якщо він відлічений за ходом годинникової стрілки. Виміряється кут
між цими півплощинами, що називається кутом повороту тіла. Кут вважається додатним, якщо він відлічений від нерухомої півплощини в напряму проти ходу годинникової стрілки (для спостерігача, що дивиться з позитивного кінця осі Az),і від’ємним, якщо він відлічений за ходом годинникової стрілки. Виміряється кут  рад.
рад. від часу t, тобто
від часу t, тобто . (2.3)
. (2.3) і кутове прискорення
і кутове прискорення  .
. або
або  . (2.4)
. (2.4) рад, а 1 хв = 60 с, то
рад, а 1 хв = 60 с, то .
. , модуль якого дорівнює
, модуль якого дорівнює  і який спрямований уздовж осі обертання у той бік, відкіля видно, що обертання відбувається проти ходу годинниковій стрілки (рис. 2.2; 2.3).
і який спрямований уздовж осі обертання у той бік, відкіля видно, що обертання відбувається проти ходу годинниковій стрілки (рис. 2.2; 2.3). . (2.5)
. (2.5)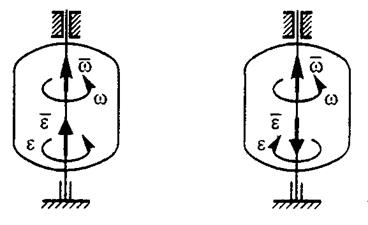 а) б)
Рис. 2.3
а) б)
Рис. 2.3
 , спрямованого уздовж осі обертання. При цьому
, спрямованого уздовж осі обертання. При цьому . (2.6)
. (2.6) (вважаючи при цьому, що в початковий момент часу
(вважаючи при цьому, що в початковий момент часу 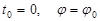 ), одержимо закон рівномірного обертання:
), одержимо закон рівномірного обертання: . (2.7)
. (2.7) (вважаючи при цьому, що в початковий момент часу
(вважаючи при цьому, що в початковий момент часу  ), одержимо:
), одержимо: . (2.8)
. (2.8) або у вигляді
або у вигляді  і вдруге інтегруючи, знайдемо закон рівнозмінного обертання:
і вдруге інтегруючи, знайдемо закон рівнозмінного обертання: . (2.9)
. (2.9)