|
|
|
Архитектура Астрономия Аудит Биология Ботаника Бухгалтерский учёт Войное дело Генетика География Геология Дизайн Искусство История Кино Кулинария Культура Литература Математика Медицина Металлургия Мифология Музыка Психология Религия Спорт Строительство Техника Транспорт Туризм Усадьба Физика Фотография Химия Экология Электричество Электроника Энергетика |
Технологія поворотів агрегатуСтр 1 из 2Следующая ⇒
Тема: Кінематика машино-тракторних агрегатів План Кінематичні характеристики машинних агрегатів Технологія поворотів агрегату Основні способи руху агрегатів Підготовка поля до роботи агрегатів
Кінематичні характеристики машинних агрегатів Кінематика агрегату — це траєкторія руху агрегату при виконанні сільськогосподарських робіт з точки зору геометричних форм. При виконанні технологічних операцій машинний агрегат здійснює робочі (робочі органи машин в роботу включені) та холості (робочі органи машин з роботи виключені) ходи. Спосіб руху — закономірність циклічно повторюваних елементів руху машинного агрегату. При будь-яких способах руху агрегату траєкторія складається з прямо- та криволінійних відрізків, причому кожна машина та її робочі органи рухаються за різними траєкторіями. Для характеристики кінематики машинного агрегату при виконанні технологічних операцій введені деякі умовні поняття та позначення. Кінематичним центром (Ца) називають таку точку агрегату, відносно траєкторії якої розглядають кінематику всіх інших його точок. Умовно прийняті розміщення Ца для основних типів тракторів наведені на рис. 6. Так, в агрегатів із колісними тракторами з однією ведучою віссю за Ца прийнята проекція на площину руху точки середини ведучої осі, а в тракторів схеми 4 х 4 та всіма керованими колесами — проекція на площину руху точки середини прямої, яка з'єднує середини ведучих осей. В агрегатів з колісними тракторами, які обладнані шарнірним остовом, за Ца прийнята проекція на площину руху центра шарніру, а у гусеничних тракторів та самохідних машин— проекція на. площину руху точки перехрещення поздовжньої осі трактора з вертикальною площиною, яка проведена через середини опорних ланок гусениці.
Рис.6. Розміщення кінематичного центра агрегату: а — колісний трактор з однією ведучою віссю; б — трактор схеми 4 X 4 та всіма керованими колесами; в — трактор з шарнірним остовом; г — гусеничний трактор Кінематична довжина lа — це проекція відстані між Ца та лінією розміщення найвіддаленішого робочого органа при прямолінійному русі, вона складається із кінематичної довжини трактора lт, зчіпки /Зч, сільськогосподарської машини lм. Кінематична ширина dк — це проекція відстані між поздовжньою віссю та крайніми точками по ширині агрегату. Розрізнюють dк праворуч та ліворуч. Довжина виїзду e — це відстань на яку необхідно проїхати кінематичним центром агрегату Ца від контрольної лінії на поворотній смузі до початку повороту, щоб попередити пошкодження рослин або огріхи. Центром повороту Цп називається точка, відносно якої в даний момент здійснюється поворот Ца (рис. 7).
Рис. 7. Кінематична характеристика агрегату Радіус повороту ρ — це відстань між Ца та Цп. При повороті з постійним радіусом Цп не змінює свого положення. Найменший радіус повороту агрегату обумовлюється радіусом повороту трактора, конструктивними особливостями машин та зчіпки, габаритами агрегату, швидкістю руху, станом грунту, кваліфікацією тракториста. Розглядаючи кінематику агрегату (див. рис. 7) можна графічним методом визначити його найменший радіус рmin: рmin = Lтсtg α, (27) де LТ — поздовжня база трактора, м; Величину рмін можна також визначити експериментально шляхом вимірювання відбитків ходового апарата на грунті. В реальних умовах експлуатації із-за бокового ковзання та уводу коліс фактичний радіус повороту збільшується в порівнянні з розрахунковим на деяку величину, яка залежить від конструкції ходового апарата та швидкості руху на повороті. Маневрові властивості машинних агрегатів характеризуються: поворотливістю, стійкістю та управляємістю руху, прохідністю. Поворотливість — це властивість агрегату переходити з прямолінійного на криволінійний рух та навпаки. Перехід руху з траєкторії, яка близька до прямолінійної, (коли р = ∞) до руху з мінімально допустимим радіусом повороту проходить не миттєво, а поступово. Такі повороти називають «вхід у поворот» та «вихід з повороту». Вони здійснюються по кривій змінної кривизни (клотоїді), яка характерна тим, що радіус кривизни р обернено пропорційний довжині пройденого шляху 5, тобто: р = Кп/S або Кп=ρS; (28) Коефіцієнт поворотливості Кп, м2, являє собою добуток радіуса повороту ρ на шлях S, який необхідно пройти агрегату, щоб досягти цього радіуса. Він характеризує як швидко агрегат входить у поворот, тобто його поворотливість і називається показником поворотливості. Для агрегатів з колісними тракторами: Кп =Lт υп / ω, (29) де υп — поступальна швидкість агрегату на повороті, км/год; ω — кутова швидкість повороту, рад/с. Стійкість руху (поздовжня та поперечна), тобто властивість зберігати сталий напрямок руху. Управляємість руху, тобто властивість агрегату переходити з сталого напрямку руху на інший, який задається дією керування. Для стійкості руху керованих мобільних машин у горизонтальній площині Прохідність агрегату — це властивість агрегату без допоміжних засобів своїм ходом долати перешкоди, які можуть зустрітися на шляху руху. Розрізняють два типи перешкод; пухкі грунти, схили місцевості, броди та глибокі рівчаки; круті схили тощо. Перші вимагають таких властивостей, щоб мобільний енергетичний засіб розвивав рушійну силу, яка близька до граничного значення за зчепленням ходового апарата, а другі — низькими розміщенням центра ваги, максимальним кутами поздовжньої та поперечної стійкості агрегату. Технологія поворотів агрегату Класифікація поворотів. При виконанні технологічних операцій деяку частину шляху складають повороти та заїзди агрегату. В середньому вони складають 10... 12 %, а на коротких гонах до 40 % загального шляху агрегату. Залежно від виду повороти класифікують на: - безпетльові — по дузі кола без прямолінійного відрізку (дугоподібні); з прямолінійним відрізком; - петльові — грушоподібні (відкрита петля); вісімкоподібні (закрита петля); - повороти з заднім ходом агрегату з відкритою та закритою петлею (навісні агрегати); - голчасті — при реверсивному ході агрегату. Можливі й інші різновиди поворотів: з застосуванням бокової та подвійної петлі, кутові тощо (рис. 8).
Рис. 8. Схеми та класифікація поворотів (за С. А. Іофіновим) Умовний радіус та розрахунок довжини повороту: У тих випадках, коли не потрібно визначати дійсну траєкторію агрегату, а достатньо лише підрахувати середню довжину повороту застосовують умовний радіус повороту ру — радіус півкола, довжина якого дорівнює фактичній довжині LП безпетльового дугоподібного повороту агрегату на кут π (рис. 9): Lп = πру (30)
Рис.9. Схеми холостих поворотів агрегату (ру — умовний радіус повороту): а — по колу; б -- з прямолінійною ділянкою; в — відкритий петльовий (грушоподібний) г — закритий петльовий (вісімкоподібний) Для інших способів повороту їх довжина наведена в довідковій літературі [Фере Н. Е. и другие Пособие по експлуатации машинно-тракторного парка]. Довжину безпетльового повороту з прямолінійним відрізком та врахуванням довжини виїзду e (рис. 9, б) можна визначити так:
де Lх — довжина холостого ходу агрегату при поворотах, м; X — ширина повороту, м. Розглядаючи інші способи повороту можна зробити такий практичний висновок, що у випадках, коли за вимогами агротехніки та техніки безпеки це можливо, краще застосовувати повороти з відкритою ніж з закритою петлею. Ширина поворотної смуги.Мінімальну ширину поворотної смуги Е з врахуванням умовного радіуса повороту визначають: - для безпетльових поворотів:
- для петльових поворотів
Поворотна смуга повинна бути кратною ширині захвата агрегату, що поліпшує якість обробітку. При груповій роботі агрегатів поворотну смугу відбивають такої ширини, яку має агрегат з найбільшим радіусом повороту.
Поиск по сайту: |


 α — середній кут повороту напрямних коліс, град.
α — середній кут повороту напрямних коліс, град.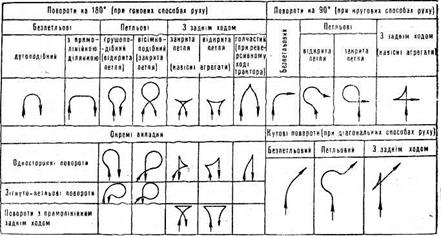

 (31)
(31) (32)
(32) (33)
(33)